脉冲调制式红外空空导弹仿真
2014-03-20黄鹤松童中翔李建勋王超哲柴世杰李慎波
黄鹤松,童中翔,李建勋,王超哲,柴世杰,李慎波
(空军工程大学航空航天工程学院,陕西西安710038)
1 引言
红外空空导弹是现代空战的核心部分,在空战仿真评估中是不可缺少的。从近几次战争来看,红外空空导弹已经成为了现代战斗机的头号劲敌,90%的飞机都是由红外导弹击毁的。随着红外探测技术的发展,传统的调制盘式红外弹已经逐渐淘汰,取代的是新一代的脉冲调制式红外导弹,这类导弹抗干扰能力强,灵敏度高已成为现代红外导弹的主体。然而由于红外导弹的推陈出新,红外干扰手段也不断地更新换代,从无源红外干扰到有源红外干扰,这场矛与盾的斗争组成了现代空战。但是红外空空导弹造价昂贵,演习中进行实弹打靶来检测红蓝双方的伤亡情况,损失巨大,是任何一个国家都承受不起的,因此对红外空空导弹进行仿真研究就显得尤为重要。同时攻击区是判断导弹性能与是否满足发射条件的一个标准,也是验证仿真出来的导弹是否可信的有力依据。本文将主要针对脉冲调制式红外导弹进行仿真,并且根据仿真出来的攻击区以及抗干扰结果与真实的导弹进行对比,从而验证仿真结果的可信性。
2 红外空空导弹模型
2.1 飞机总体红外辐射
导引头只有接收到了靶机的辐射才能对目标进行跟踪,因此研究飞机的总体红外辐射对红外空空导弹的仿真至关重要。
飞机总体的红外辐射主要由三部分组成,即蒙皮辐射、尾焰辐射、尾喷口辐射。这方面的文献较多,因此本文对各部分辐射的具体算法不再详述,详细计算方法请见文献[1]~[3]。
2.2 脉冲调制式探测器
以往的大多数文献针对的导引头探测器都是调制盘式探测器。但是调制盘式探测器靠输出的频率、幅值的改变来判断目标像点的位置,这种方法误差较大同时存在盲区,并且因为采用能量质心法,对红外诱饵、干扰机几乎不存在抗干扰能力,在三代以后的导弹已经不再采取这种调制方法。目前的三代弹广泛采取脉冲调制式多元探测器,这种探测器探测目标准确不存在盲区、抗干扰能力强。其主要的有二元和四元探测器,它们的原理基本相同。
下面以四元探测器为例介绍其计算目标像点位置的方法。如图1所示U、L、D、R为四个探测器,当像点轨迹的圆心O与探测器中心重合时,像点通过四个探测器时间间隔相等,四个探测器输出的信号与基准电压的频率一致,说明目标与导引头位标器指向一致,位标器不需要偏转;当像点轨迹的圆心O'偏离中心时,像点通过各探测器的时间间隔不相等,分别偏离A和B相位,因此导引头离轴角不为零,位标器需要偏转一定角度跟踪目标。目标相位可以由A、B得到:


图1 四元正交探测器探测原理Fig.1 Quaternary orthometric detector detection principle
2.3 空空导弹抗干扰技术
红外导弹之所以有如此高的命中率很大程度上取决于其内部的抗干扰算法。抗干扰算法主要分为以下几类:基于运动区别、缩小识别区域以及基于红外辐射图像的差别。前两类主要用于三代空空红外制导导弹,后一类主要用于四代空空红外制导导弹。
2.3.1 基于运动区别
基于运动区别的抗干扰算法主要是根据目标机与诱饵的运动区别,通过对比其轨迹、位置上的差异从而确定真假目标,主要包括:位置记忆法、弹道选择法和轨迹外推法,其中的位置记忆最为常见。位置记忆法是比较两周期目标的位置,距离最近者为目标。其主要流程为导引头将本周期的目标位置储存起来,当下周期在视场内出现多个目标时,导弹进入抗干扰模式同时将本周期储存的目标位置与之对比,选取距离最近者为目标同时存储目标位置退出抗干扰模式。
2.3.2 缩小识别区域
缩小识别区域主要是在导引头锁定目标时将视场收缩以及设置波门,使在视场之外的干扰信号得以屏蔽的一种抗干扰算法。主要包括:视场收缩、波门设置。缩小识别范围是三代空空红外制导导弹采用的最常见的抗干扰算法,这种算法可以有效识别出大部分干扰。设置的波门尺寸仅仅略大于目标信号,导引头只处理波门以内的信号,将大部分的波门以外的信号予以忽略,这样大大提高了识别抗干扰的效率。
2.4 红外空空导弹数学建模
红外空空导弹的总体框架如图2所示,其中包含的数学模型主要有:导引识别模型、导弹运动模型、导弹变质量模型以及过载对导弹的限制[4-5]。
图2 红外空空导弹总体框架Fig.2 Infrared air-to-airmissile overall framework
2.4.1 导引识别模型
目前红外空空导弹的导引方法主要有:平行接近法、追踪法以及比例导引法。由于比例导引法方程简单,制导系统易于控制且弹道轨迹比较笔直易于追踪目标,在红外空空导弹上得到了广泛应用,本文建立的导引模型采用比例导引法。
比例导引法的导引方程为:

式中,qε为弹目线与水平面的夹角;qβ为将弹目线投影到水平面上后与地轴系OgXg轴所成的夹角;θ为导弹的航迹俯仰角;φc为导弹的航向角;N1、N2为比例系数。
2.4.2 导弹运动模型
将导弹看做质点只考虑其三自由度的方程。这样既不会影响仿真效果同时也会使方程简单很多。
(1)导弹的运动学方程

(2)导弹的动力学方程
式中,X、Y、Z分别为气动阻力、升力以及侧向力;G为导弹的重力;α为导弹的攻角;F为发动机的推力;β为导弹的侧滑角;φc为导弹的航向角;θ为导弹的航迹俯仰角。
(3)发动机推力方程
红外空空导弹大都使用固体火箭式发动机,对于单级发动机可以在点火后很短的时间(0.5 s以内)将推力上升到最大值,此后推力基本为恒定值,然后再逐渐减为零。推力的变化图像近似一个梯形。

式中,K1、K2是比例系数;t1、t2、t3分别对应着发动机三个阶段的时间。对于多级发动机,火箭的推力曲线大致为阶梯状。
(4)导弹的变质量方程

(5)过载对导弹运动模型的限制
若在某质量和速度下导弹的可用最大过载为nmax,则:

式中,ω为转弯角速度;n为过载,则有:
由矢量合成法知ω2=θ2+φc2,若导引方程确定出来的ω大于ωmax则由过载方程确定导弹的速度改变方向,若ω≤ωmax则由导引方程确定导弹的速度改变方向。
2.5 模型简化
尽管导弹的三自由度方程已经比较简单,但是式中的升力Y、侧向力Z以及阻力X由导弹的气动外形所决定,目前能够得到大家认可的就是利用Fluent仿真来计算流场。升力Y、侧向力Z以及阻力X随着导弹的攻角α、侧滑角β以及导弹的飞行马赫数而变化。将每一个马赫数下导弹的各种姿态的气动力都算一遍显然费时费力不切合实际,因此本文现将对其进行简化。认为攻角α、侧滑角β都为零,导弹平飞时升力等于Y,侧向力为零。当有机动转弯时根据导引方程与过载限制共同确定转弯的角速度,那么方程变成了只需要联立求解:

2.6 Fluent计算的结果
由2.5节简化后的模型可知,只需要计算出在不同马赫数下模型的阻力系数。本文先根据导弹尺寸画出导弹的外形,然后应用ANSYS ICEM划分网格,如图3所示,最后将划分好的网格导入到Fluent里进行流场计算,计算出在不同马赫数下导弹的阻力系数如图4所示。

图3 网格划分结果Fig.3 Grid division result
图4 不同马赫数下的阻力系数Fig4.Drag coefficient under different Mach
3 诱饵模型
随着红外导弹的更新换代,命中概率越来越大,红外诱饵也因此诞生。红外诱饵的主要目的是短时间内产生大量的热,类似于发动机尾喷口的辐射,以此对导引头产生干扰。目前的红外诱饵多是在飞机上弹射出去无动力飞行,其受到的主要是阻力和重力,因此模型相对简单:

式中,为速度方向与水平面的夹角(向下为正);Cx为诱饵弹的阻力系数;ρ为空气密度。
假设诱饵弹的燃烧是均匀燃烧,则其质量随时间的变化规律为:

式中,mt为t时刻诱饵弹的质量;m0为诱饵弹初始质量;K为比例系数。
诱饵弹起燃时间很短,基本上小于0.5 s,起燃后辐射强度急速上升,然后强度基本稳定不变,整个燃烧过程在4~6 s。
4 红外空空导弹仿真结果及误差分析
以国外某型红外空空导弹为例,按照导弹技术说明书上的指标对其进行仿真。分别对比仿真出来的导弹与真实导弹的攻击区以及抗干扰结果的差别,从而检验仿真出来的导弹的可信性。
4.1 攻击区的仿真结果
攻击区的算法常见的是以导弹为中心或者以目标机为中心,将视线绕中心旋转一周,算出每个角度能打中目标的最远距离(目标在这过程中不做任何机动,以原有速度、方向平飞)[6-7]。
4.1.1 攻击机与目标机同一高度,目标机平飞
下面用前述的方法对国外某型导弹进行仿真,计算其攻击区与实际的攻击区进行比较。攻击区的算法是以目标机为中心,以飞行方向为零度视角顺时针旋转。假设飞机在海拔3000 m处,以0.8 Ma速度沿X轴直线飞行,此时导弹也在海拔3000米的高度,发射初速度也为0.8 Ma,仿真结果如表1和表2以及图5和图6所示。

表1 仿真与真实的攻击区比较一Tab.1 First of simulated attack zone compare with real attack zone

表2 仿真的与真实的攻击区比较二Tab.2 Second of simulated attack zone compare with real attack zone

图5 仿真的攻击区形状Fig.5 Simulated attack zone shape

图6 视角在30°时导弹和目标机的三维轨迹图Fig.6 Angle of view at30 degreesmissile and target aircraft three-dimensional trajectories
4.1.2 攻击机高目标机低,目标机平飞
将靶机的高度改为4000 m,其他条件和4.1.1的相同,仿真结果如图7和图8所示。

图7 仿真的攻击区形状Fig.7 Simulated attack zone shape
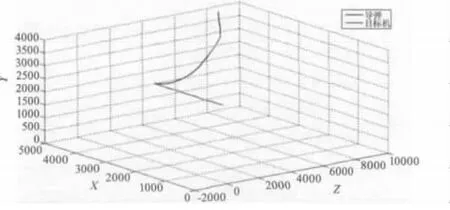
图8 视角在30°时导弹和目标机的三维轨迹图Fig.8 Angle of view at30 degreesmissile and target aircraft three-dimensional trajectories
4.1.3 攻击机低目标机高,目标机平飞
将目标机的高度改为4000 m,其他条件和4.1.1的相同,仿真结果如图9和图10所示。
4.2 某型红外空空导弹的抗干扰仿真结果
以国外某型导弹为例,在设置相同的初始情况下比较真实导弹性能的抗干扰概率和仿真出来的抗干扰概率的差别,其结果如表3和表4所示[8]。
4.3 仿真误差分析
从表中的结果可以看出,仿真出来的结果与真实攻击区的误差控制在了20%以内,抗干扰结果仿真的误差最大的也不到15%,可以看出仿真的导弹精度可以达到要求。

图9 仿真的攻击区形状Fig.9 Simulated attack zone shape

图10 视角在30°时导弹目和标机的三维轨迹图Fig.10 Angle of view at30 degreesmissile and target aircraft three-dimensional trajectories

表3 初始条件为高度3000m,速度0.6MaTab.3 Initial conditions for the height of 3000 meters,the speed of 0.6 Mach

表4 初始条件为高度10000m,速度1MaTab.4 Initial conditions for the height of 10000 meters,the speed of 1Mach
仿真结果误差的存在主要由以下几个因素产生:
(1)红外导引头的灵敏度不知道也就是导引头能够识别的最低辐射值不知道,需要仿真数值。
(2)导弹模型的简化必然会导致产生一定的误差。
(3)导弹仿真过程中认为控制是理想控制,即舵面一次偏转到位,不存在舵偏角修正。而实际导弹的控制是通过负反馈逐步修正舵面直到与所需角度一致。
(4)导弹在各种情况下的气动数据都是通过CFD计算得到,存在一定误差。
5 结束语
本文将导弹的识别、制导、运动相结合,对抗干扰方法进行总结,建立了完整的导弹模型。通过导弹模型得到了攻击区以及抗干扰性能,无论仿真出的攻击区还是抗干扰性能都能达到要求,解决了空战评估中导弹仿真的问题。但是由于模型过于简单,导弹的很多数据需要自己计算或者评估,存在一定的误差,在以后的学习、工作过程中会进一步完善。
[1] WANG Chaozhe,TONG Zhongxiang,LU Yanlong,etal.Study on the airplane’s infrared radiation characteristics[J].Laser& Infrared,2011,41(9):996 -1001.(in Chinese)王超哲.童中翔,卢艳龙,等.飞机红外辐射特性及其探索技术研究[J].激光与红外,2011,41(9):996-1001.
[2] LIU Juan,GONG Guanghong,HAN Liang,et al.Modeling and simulation of airplane infrared characteristic[J].Infrared and Laser Engineering,2011,40(7):1209 -1213.(in Chinese)刘娟,龚光红,韩亮,等.飞机红外辐射特性建模与仿真[J].红外与激光工程,2011,40(7):1209 -1213.
[3] LI Jianxun,TONG Zhongxiang,WANG Chaozhe,et al.IR radiation characteristics analysis and vulnerability assessment of aircraft[J].Laser & Infrared,2013,43(2):180 -185.(in Chinese)李建勋,童中翔,王超哲,等.飞机红外辐射特性分析与易损性评估[J].激光与红外,2013,43(2):180-185.
[4] ZHANG Ping,FANG Yangwang,JIN Chong,et al.A New Method of Real-time Calculation for Attack Area of Air- to - Air Missile[J].Journal of Ballistics,2010,22(4):11 -18.(in Chinese)张平,方洋旺,金冲,等.空空导弹攻击区实时算法的新方法[J].弹道学报,2010,22(4):11-18.
[5] WANG Haiqing,CHENG Mei.A Study of Simulation Test for Infrared Guidance Missile[J].Aircraft Design,2009,29(2):57 -63.(in Chinese)王海青,程梅.红外导弹仿真试验研究[J].飞机设计,2009,29(2):57 -63.
[6] LIChenghua.Study onadvanced IR guided missile countermeasures[J].Electro - Optic Technocogy Application,2003,72(4):8 -11.(in Chinese)李程华.先进红外制导导弹对抗方法研究[J].光电技术应用,2003,72(4):8 -11.
[7] HUANG Jiacheng,ZHANG Yingchun,LUO Jixun.Fast simulation of air- to - airmissile launch area[J].Journal of Projectiles,Rockets,Missiles and Guidance,2003,23(4):132 -134.(in Chinese)黄家成,张迎春,罗继勋.空空导弹攻击区快速模拟法求解[J].弹箭与制导学报,2003,23(4):132 -134.
[8] WANG Chaoqun.Some characteristics of infrared jam and its simulation technique on infrared guided missile[J].Infrared and Laser Engineering,2001,30(4):163 -167.(in Chinese)汪朝群.红外诱饵对红外制导导弹的干扰特性及仿真[J].红外与激光工程,2001,30(4):163 -167.
