向量场方法无人直升机轨迹跟踪控制
2014-03-07项林杰袁锁中戴文正
项林杰,袁锁中,戴文正,周 鑫
(南京航空航天大学自动化学院,江苏 南京 210016)
向量场方法无人直升机轨迹跟踪控制
项林杰,袁锁中,戴文正,周 鑫
(南京航空航天大学自动化学院,江苏 南京 210016)
为实现无人直升机自主跟踪预定轨迹,根据无人直升机的位置和航向信息,提出一种基于向量场的无人直升机轨迹跟踪制导方法。该方法依据地面轨迹航向误差和侧偏距误差渐进为零设计制导律,可用于直线和圆弧轨迹的跟踪。仿真结果表明该方法能使无人直升机成功跟踪预定轨迹,且具有良好的跟踪性能。
无人直升机;轨迹跟踪;向量场;制导律
0 引 言
无人直升机具有垂直起降、空中悬停、转弯灵活迅速等优点,广泛用于高风险、起降环境受限和低速飞行等各种复杂任务,在未来的战场上,将发挥越来越重要的作用。
近年来,人们对于无人直升机的轨迹跟踪控制进行了很多研究,提出多种轨迹跟踪控制方法。文献[1]提出一种对于曲线轨迹精确跟踪的方法,即在所期望跟踪的轨迹上选取一系列的参考点,使无人机跟踪所选取的参考点来跟踪期望轨迹。文献[2]提出一种将制导和控制相结合的方法,精确跟踪参考轨迹。文献[3]提出一种基于视线制导的方法,应用在无人直升机着舰的轨迹跟踪上。不足的是,上述方法的实现过程比较复杂,计算量大。
为了提高无人直升机的轨迹跟踪性能,本文提出一种新的基于向量场的无人直升机轨迹跟踪控制方法。该方法通过计算无人直升机的航向和与预定轨迹的侧偏距来设计制导律,使无人直升机自主跟踪预定轨迹。
1 向量场方法描述
向量场的概念和势能场类似,势能场广泛应用于机器人路径规划中[4]。文献[5]提出将势能场作为一种导航方法应用于无人机的避障和避碰。与势能场不同的是,向量场不用表现出势能场所要表现出的梯度,应用在无人直升机上,其矢量方向只是简单地表明无人直升机所期望的飞行方向,为其提供航向指令[6]。向量场轨迹跟踪方法示意图如图1所示。
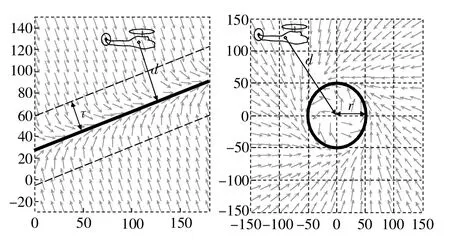
图1 直线和圆弧向量场示意图
2 无人直升机的轨迹跟踪制导律设计
基于向量场方法的无人直升机轨迹跟踪与控制结构如图2所示。在地面坐标系中设计一条预定飞行轨迹,将无人直升机实际飞行轨迹与预定飞行轨迹进行比较,经制导系统处理,得到无人直升机与预定轨迹的位置误差和航向误差,利用向量场方法求出无人直升机的航向指令和跟踪预定轨迹[7-8]。
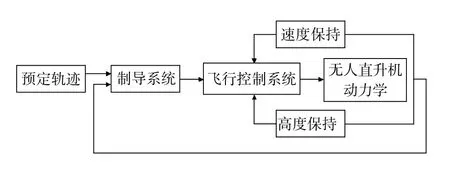
图2 无人直升机轨迹跟踪系统框图
2.1 直线轨迹跟踪
如图1所示,根据无人直升机所处的位置,设置向量场方向:
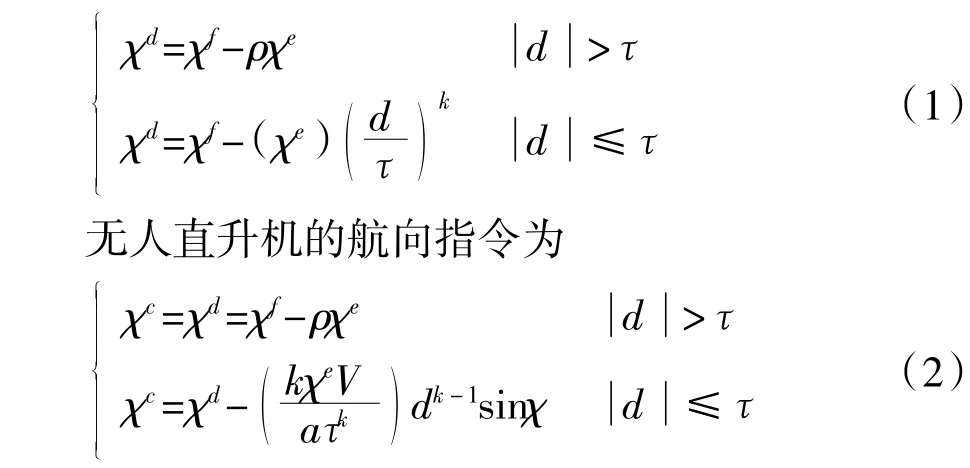
式中:a,k,χe——常量;
d——无人直升机到预定轨迹的垂直距离;
ρ——无人直升机相对预定轨迹的方向;
χf——两航路点间的航向;
V——无人直升机的飞行速度。
2.2 圆弧轨迹跟踪
如图1所示,根据无人直升机所处的位置,设置向量场方向:
向量场方向无人直升机的航向指令为
r——设定圆弧轨迹的半径;
γ——无人直升机位置在极坐标中的角度。
2.3 稳定性分析
2.3.1 直线轨迹
图3 y>0的向量场几何图形

当-π≤χ≤时,<0,是负半定的。

定义M的范围式(6)表明若无人直升机的位置在区域内,无人直升机将在有限的时间内进入M所描述的范围。
2.3.2 圆弧轨迹
图4 圆弧轨迹向量场几何图形
如图4所示,若无人直升机距离轨道圆心d>2r,

3 仿真实验
为验证所设计的制导律应用在无人直升机上的跟踪性能,采用某型无人直升机模型进行仿真实验,该无人直升机已通过飞行实验验证。考虑到仿真实验要求,控制无人直升机高度和速度保持恒定,高度为250m,速度V为20m/s。
以起始位置(1 900,700,250)m,对两航路点直线轨迹进行跟踪,仿真结果如图5所示。可以看到无人直升机能够快速跟踪设定的直线,而且跟踪误差很小。图6为无人直升机跟踪直线轨迹时其姿态角及侧滑角变化曲线。
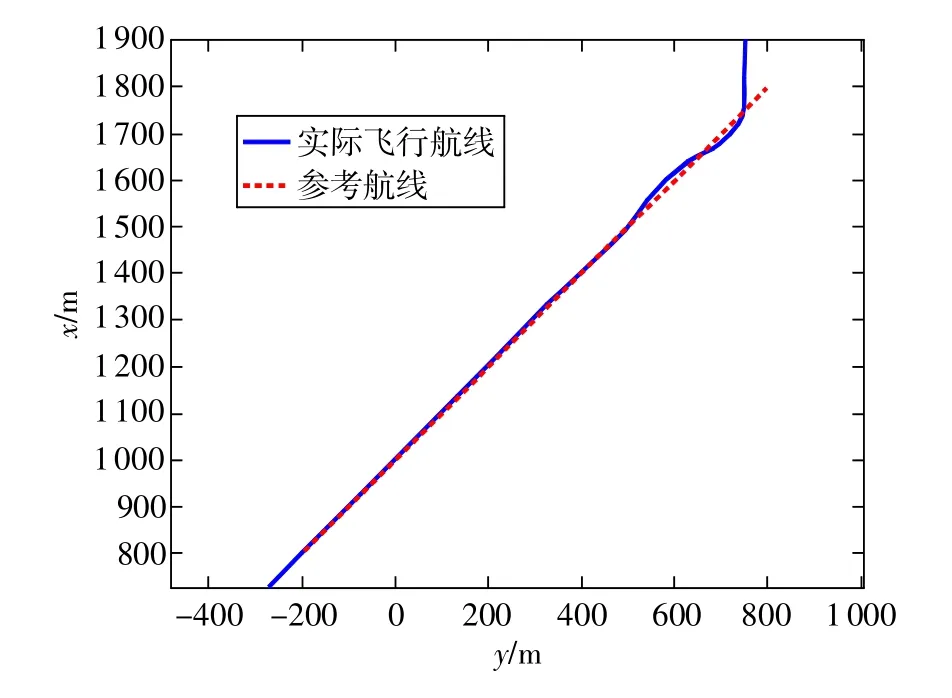
图5 两点直线轨迹跟踪图
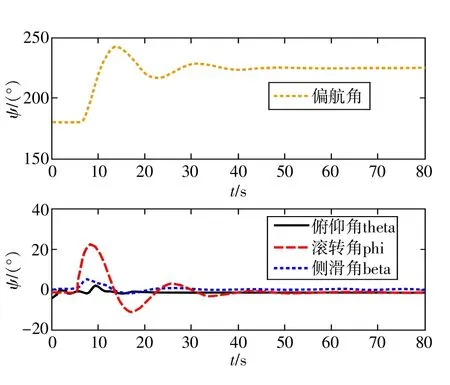
图6 两点直线轨迹跟踪姿态响应曲线
以起始位置(1500,100,250)m,对圆心O(100,250)m,半径r=800m的圆弧轨迹进行跟踪,仿真结果如图7所示。可以看出初始时刻无人直升机对于圆弧轨迹的跟踪误差相对较大,这是由于无人直升机的初始航向与设定轨迹航向偏差较大,且距离较远。但无人直升机能够迅速消除误差,跟踪上设定轨迹,而且之后的跟踪误差很小。图8为无人直升机跟踪圆弧轨迹时其姿态角及侧滑角变化曲线。
对于直线和圆弧混合的轨迹,所设计的制导律也能够对其进行跟踪,起始位置为(1400,200,250)m,仿真结果如图9所示。可以看到无人直升机能够很好地对直线和圆弧轨迹进行切换跟踪,跟踪误差很小。
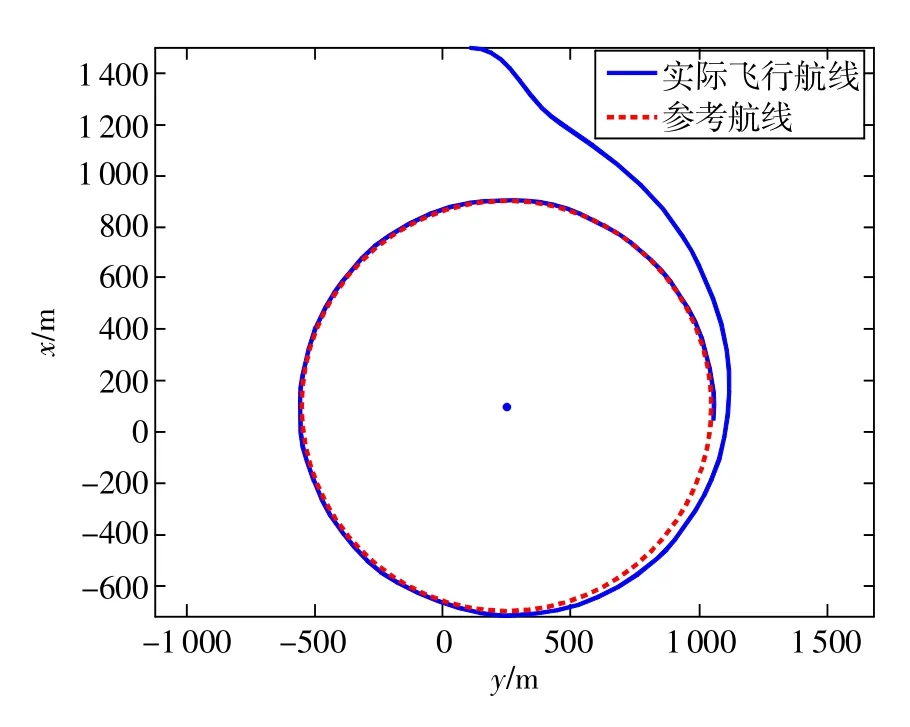
图7 圆弧轨迹跟踪
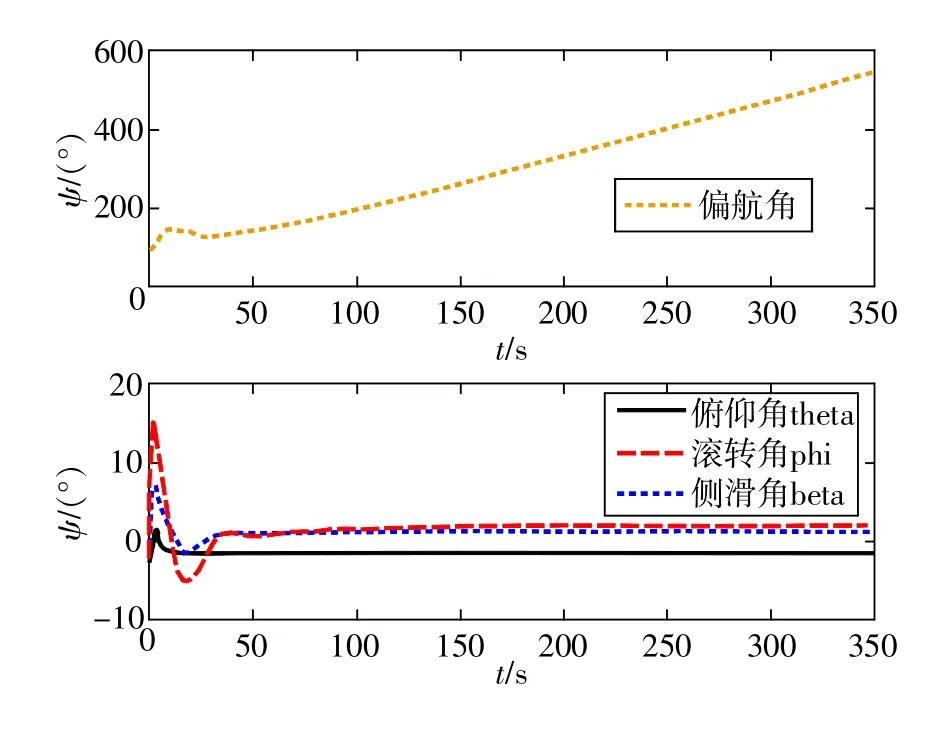
图8 圆弧轨迹跟踪姿态响应曲线
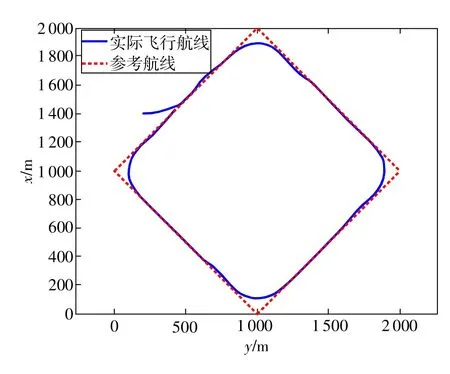
图9 直线与圆弧混合轨迹跟踪
4 结束语
本文将向量场方法应用于无人直升机,设计制导律并通过李雅普诺夫判据证明设计的制导律能够跟踪所设定的直线及圆弧轨迹。无论无人直升机与设定轨迹的初始相对位置距离多大,该方法都能够使无人直升机迅速地靠近并跟踪所设定的轨迹,且此方法易于实现。由于直线和圆弧轨迹基本能够满足无人直升机实际的飞行要求,因此对该方法的研究是很有意义的。
[1]Park S,Deyst J,How J P.A new nonlinear guidance logic for trajectory tracking [C]∥AIAA Guidance,Navigation,and Control Conferenceand Exhibit,2004:16-19.
[2]Kaminer I,Pascoal A,Hallberg E,et al.Trajectory tracking for autonomous vehicles:An integrated approach to guidance and control[J].Journal of Guidance,Control,and Dynamics,1998,21(1):29-38.
[3]戴文正,袁锁中,周鑫.无人直升机自主着舰的航线生成与跟踪控制[J].现代电子技术,2013,36(1):5-8.
[4]Khatib O.Real-time obstacle avoidance for manipulators and mobile robots [C]]∥Robotics and Automation Proceedings IEEE International Conference,1985:500-505.
[5]Sigurd K,How J.UAV trajectory design using total field collision avoidance[C]]∥Proceedings of the AIAA Guidance,Navigation and Control Conference,2003.
[6]Nelson D R,Barber D B,McLain T W.Vector field path following for small unmanned air vehicles[C]]∥American Control Conference,2006.
[7]Gadewadikar J,Lewis F,Subbarao K.Structured hinfinity command and control design for unmanned helicopters[J]. JournalofGuidance,Controland Dynamics,2008,31(4):1093-1102.
[8]杨一栋.直升机飞行控制[M].2版.北京:国防工业出版社,2011:70-93.
Trajectory tracking control of unmanned helicopter based on vector field method
XIANG Lin-jie,YUAN Suo-zhong,DAI Wen-zheng,ZHOU Xin
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
In order to achieve the unmanned helicopter autonomous tracking the desired trajectory,a method based on the vector field is proposed to design the guidance law of the unmanned helicopter according to the location and course information of the unmanned helicopter.The key feature of this approach is that ground track heading error and lateral following error approach zero asymptotically to design the guidance law and it can be used to follow straight-line and circular-orbit paths.Simulation results show that the method enables the unmanned helicopter successfully to track the desired trajectory,and presents well tracking performance.
unmanned helicopter;trajectory tracking;vector field;guidance law
V249;V279;V211.8;TN911.7
:A
:1674-5124(2014)06-0091-04
10.11857/j.issn.1674-5124.2014.06.024
2014-01-13;
:2014-03-21
航空科学基金项目(20121352026)国家自然科学基金项目(61273050)
项林杰(1990-),男,安徽黄山市人,硕士研究生,专业方向为空中加油控制。