用于未来月球探测的ILOM技术现状
2014-03-06HideoHANADASeiitsuTSURUTAKazuyoshiASARIHiroshiARAKIHirotomoNODAShingoKASHIMAKenichiFUNAZAKIFuyuhikoKIKUCHIKojiMATSUMOTOYusukeKONOHirooKUNIMORIShoSASAKI
Hideo HANADA,Seiitsu TSURUTA,Kazuyoshi ASARI,Hiroshi ARAKI, Hirotomo NODA,Shingo KASHIMA,Ken-ichi FUNAZAKI, Fuyuhiko KIKUCHI,Koji MATSUMOTO,Yusuke KONO, Hiroo KUNIMORI,Sho SASAKI
(1.日本国立天文台RISE研究室,奥州,日本;2.综合研究大学院大学天文学部,三鹰,日本;3.岩手大学工学院,盛岗,日本; 4.国立天文台水泽VLBI观测站,三鹰,日本;5.国立信息通信技术研究院无线网络研究所,小金井,日本;6.大阪大学地球与空间科学部,丰永,日本)
用于未来月球探测的ILOM技术现状
Hideo HANADA1,2,Seiitsu TSURUTA1,Kazuyoshi ASARI1,Hiroshi ARAKI1,2, Hirotomo NODA1,2,Shingo KASHIMA1,Ken-ichi FUNAZAKI3, Fuyuhiko KIKUCHI1,Koji MATSUMOTO1,2,Yusuke KONO2,4, Hiroo KUNIMORI5,Sho SASAKI6
(1.日本国立天文台RISE研究室,奥州,日本;2.综合研究大学院大学天文学部,三鹰,日本;3.岩手大学工学院,盛岗,日本; 4.国立天文台水泽VLBI观测站,三鹰,日本;5.国立信息通信技术研究院无线网络研究所,小金井,日本;6.大阪大学地球与空间科学部,丰永,日本)
使用面包板模型和仿真方法,在实验室内研究月球指向就位测量望远镜(ILOM)的基本特征,如望远镜星像中心点位置精度、温度效应、倾斜以及地面震动的影响。使用这个技术预期在月球表面观测月球自转时可以达到1 ms的精度。将在地面上开展测试验证观测以全面评价达到优于0.1″观测精度目标所需条件和特征。
月球;ILOM;望远镜;照相天顶筒;水银槽
0 引 言
测月观测,如月球自转、重力场及其潮汐形变等,是研究月球内部结构的最重要和最基本的观测之一。我们为“月女神2号”和后续的月球探测计划研发了用于研究和探测月球内部结构的设备,包括差分VLBI射电源、LLR激光测月后向反射器以及月球指向就位测量望远镜(ILOM)。
VLBI技术是月球探测器轨道测定的有效方法手段。“月女神”任务中的测轨和月球重力场探测使用了差分VLBI技术,并且在X-波段达到了1 ps的延迟测量精度,从而实现了10 m精度的卫星轨道测量[1]。鉴于设计中考虑了更多的同波束差分VLBI测量的机会,预期测量轨道器与着陆器之间的双差分单向距离观测量的精度将比“月女神”任务期间获得的精度更高。S/X双频段双波束地面天线系统可以增加同时观测两个探测器的机会,为此,我们正在开发一个自互补相位阵天线系统。同时,我们针对未来着陆探测任务研发了一类可以工作在-200~120℃温度范围的140 MHz带宽的60°波束宽度-5 d Bi增益的天线系统[2]。
我们建议在月球上放置一个新的反射器用以改善目前月面上LLR激光反射器网的分布,使得更多的地面台站有机会参与LLR的观测,进而改进和提高LLR观测的精度[3]。新的反射器一改传统的角反射器阵列的概念,将仅仅使用一个大体积角反射器。它不会因为光线入射角的变化而对光学中心产生移位的影响,这样可以把测距精度提高到1 mm。反射器的2个相交表面构成的二面角加工精度将优于0.1″以使得更有效地反射回程光子的能量[4]。因此,反射器的加工方式正在沿着两个技术途径研发,可以是三个镜面的粘合,也可以是整个晶体制作一个后像反射镜。
在ILOM计划中,我们正在开发小型数字化照相天顶筒,通过在月面上以1 mas的测量精度观测恒星的位置及变化测量月球的自转。这个技术与地球和月球的轨道运动无关,为此与LLR相互独立。利用这种技术在月面上进行1年以上的观测,可以检测与月球内部构造关联的月球物理天平动的微小成分和自由天平动[5-6]。我们已经研发了一个面包板模型样机,并设置在地面台站开展测试观测,作为未来月球表面望远镜技术的初步验证。
1 月面ILOM望远镜技术研发
1.1 面包板模型样机
照相天顶筒使用水银槽作为反射镜面设置在望远镜光路的中间位置。星像焦平面与物镜重合,通常使用一个与光路成45°角的反射镜把光线从物镜附近引开,从侧面成像。图1给出了模型的光路原理。基于这个基本的理念,我们研发了ILOM的BBM样机。望远镜的环境测试结合日本国立天文台的JASMINE光学天体测量望远镜计划,由国立天文台和岩手大学合作完成。望远镜参数见表1。

图1 面包板样机原理光路Fig.1 Bread board model for PZT
在测试实验中,使用5μm×5μm像素大小的CCD成功地测得了1/300像素的恒星位置精度,对应于3 mas的望远镜空间位置分辨能力[7]。PZT形式的望远镜的镜筒倾斜效应将会混入观测中。如果倾斜角度小于80″,影响将小于1 mas[8]。姿态控制系统可以把望远镜的倾斜控制在20″左右[9]。光线追踪仿真可以揭示环境温度变化的效应,这部分的影响大小约为3 mas/℃。如果引入绕射光学元件,这个影响可以控制在0.1 mas/℃[10]。

表1 望远镜特性参数Table 1 Specification of the telescope
1.2 地面试验模型样机
为了适应地面测试观测试验,我们改进了BBM模型样机升级到地面测试模型样机,见图2。新的三角架支撑结构使得望远镜可以被设置在倾斜度30°的斜坡上。新版PZT可以作为测量地面垂线偏差DOV的设备以0.1″的精度工作[11-12]。然而这种观测并非总能顺利进行,主要是地面观测受到大气扰动、地面震动以及大气温度变化的影响,使得星像出现抖动。后续工作将进一步确认这台仪器观测DOV的极限精度是多少。望远镜的空间分辨率一般取决于天文台站视宁静度、望远镜衍射极限和CCD像素尺寸。后两个因素是光学系统和探测器固有的,不依赖于环境。

图2 ILOM地面测试BBM模型Fig.2 The BBM ground experiment model of ILOM
衍射极限θ可以表达为艾利斑的半径,θ= 1.22λ/D rad,这里λ是光波波长、D是望远镜物镜的孔径。当D=0.1 m和λ=600 ns时,θ=7.32× 10-6rad或1.5″。采用点扩散函数拟合估计星像质心,就可以确定优于衍射极限的恒星位置。我们以1 mas为目标观测精度考虑星像质心估计以及CCD像素尺寸。对衍射极限和CCD像素尺寸的要求,在就月面和地面观测而言没有显著的差异。
在地面观测时,可以通过延长积分时间来抑制大气抖动中的随机扰动部分带来的效应影响。粗略地讲,如果在积分时间内可以获得100份数据,标准差可以降低到1份数据的1/10。长积分时间还可以提高观测的信噪比SNR,这一项改进对提高恒星的位置测量精度至关重要。
然而,由于PZT类型的望远镜不对恒星进行跟踪,为此积分时间的延长是有限的。地面观测试验过程中,恒星在视场中由于地球自转而移动。最长积分时间受到地球自转速率的约束。对于7.3 rad/s的地球自转速率而言,最长积分时间为48 s。ILOM在月球表面的设计积分时间长于100 s[8]。考虑到月球比地球转速快数十倍,实际上月球上的观测积分时间比100 s要长许多,可以预期得到的恒星位置观测精度也要比地球上高许多。在地球上观测,可以把大气抖动的效应抑制到0.1″以下。
2 地面初步试验
地面的振动是影响这类高精度天体测量观测的因素。为此,试验观测中需要对望远镜的水银槽及其中的水银面变化特别关注[13]。
在地面初步试验中,我们研究了水银面由于地面振动而导致的星像在CCD上的移动。试验中记录了人工恒星图像质心高斯拟合质心的60 Hz和30 Hz采样频率的变化。地面抖动通过并置3个方向成分的地震仪观测记录低于1 Hz频率的振动。图3显示了水银槽中水银厚度为0.5 mm时星像质心的变化。作为对比,图4给出了不使用水银槽的情况下星像位置抖动测量结果,二者一致。比较表明水银槽内0.5 mm厚的水银是合理的。

图3 0.5 mm厚水银槽反射得到的星像中心位置变化(实验时间是2013/12/3 15:51:3)Fig.3 Variations of the centroids with a mercury pool of 0.5 mm depth (Time:2013/12/3 15:51:3)
上述实验结果对应的星像质心位置变化的频谱分析分别在图5和图6中给出,结果表明,频率低于0.7 Hz的谱比较强。而在0.5、1.0和2.0 Hz上没有看到以前出现的强干扰信号[14]。这可能是由于试验时地面振动没有那么强烈,不足以激发水银槽和水银面产生显著的抖动。在观测中,如果使用了地面振动数据校准星像质心位置,有机会把地面振动的影响抑制在5×10-7m以下。由于初步的试验是在试验室环境下进行的,后期在室外使用真实星像开展的实现可能会有所不同,但是这里研发的校正方法仍然有效。
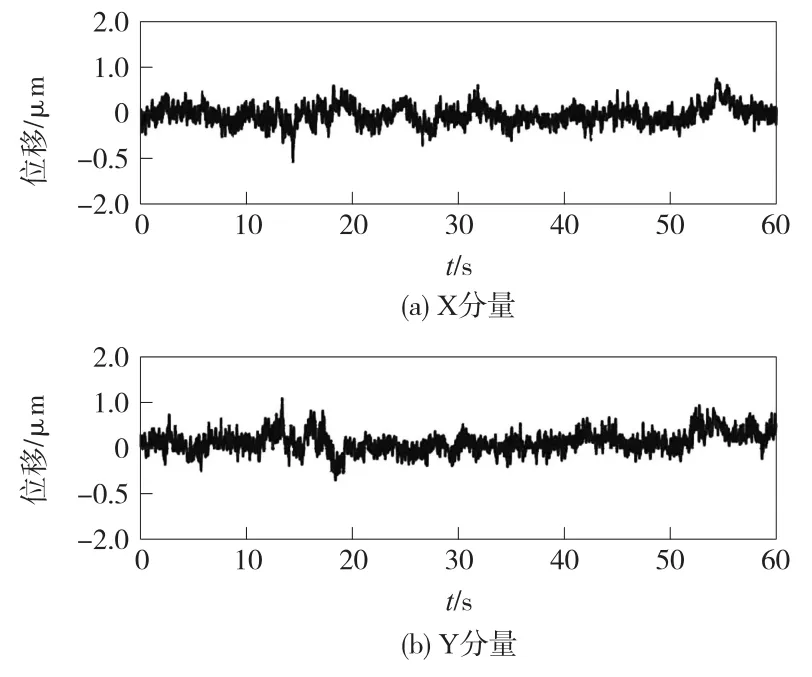
图4 无水银槽的得到星像中心位置变化(实验时间是2013/12/3 14:55:16—14:56:16)Fig.4 Variations of the centroids without a mercury pool (Time:2013/12/3 14:55:16—14:56:16)
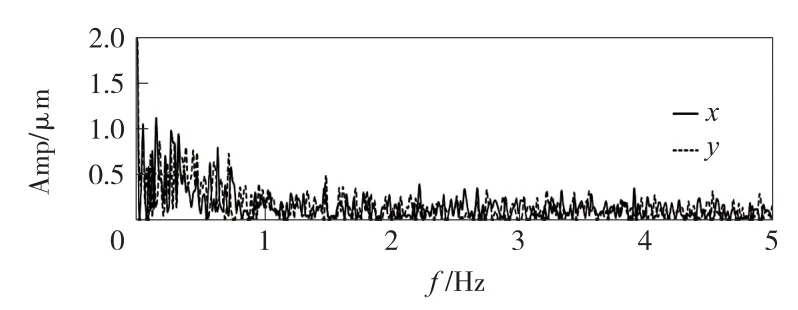
图5 5 mm厚水银槽反射的星像中心位置变化的频谱特征Fig.5 Power spectra of the variation of stellar position in the case with a mercury pool of 5 mm depth

图6 无水银槽反射镜得到的星像中心位置变化的频谱特征Fig.6 Power spectra of ground vibrations for the period corresponding to the experiment with the mercury pool (upper)and that with a mirror instead of it(lower)
3 结束语
在搭载月球着陆探测奔赴月球之前,我们将使用研制的ILOM模型样机在地球上开展观测验证试验,用于检验整个ILOM PZT样机的软硬件系统。并且对试验中地面抖动和温度效应导致的CCD星像位置变化的效应进行测量模制。地面试验预期达到的星像位置测量精度是0.1″。这个试验的重要的科学目标是检测由于火山活动或者地震活动导致的铅垂线DOV变化。未来还将在试验室模拟月球表面环境,进一步验证1 mas测量精度的技术能力。
致谢
作者感谢中科院国家天文台平劲松研究员及其团队将本文由英文翻译成中文。
[1]Kikuchi F,Liu Q,Hanada H,Kawano N,Matsumoto K, Iwata T,et al.Pico-second accuracy VLBI of the two subsatellites of SELENE(KAGUYA)using multi-frequency and same beam methods[J].Radio Science,2009(44):1-7. doi:10.1029/2008RS003997
[2]Kikuchi F,Matsumoto K,Hanada H,Tsuruta S,Asari K, Kono Y,et al.Recent status of SELENE-2/VLBI instrument[J].Trans.JSASS Aerospace Tech.Japan, 2014(12):Pk_13-Pk_19.
[3]Sasaki S,Hanada H,Noda H,Kikuchi F,Araki H, Matsumoto K,et al.Lunar gravity and rotation measurements by Japanese Lunar Landing Missions,Trans. JSASS Aerospace Tech.Japan[J].2012(10):Tk_33-Tk_36.
[4]Otsubo T,Kunimori H,Noda H,Hanada H,Araki H, Katayama M.Asymmetric dihedral angle offsets for largesize lunar laser ranging retroreflector[J].Earth Planets Space,2011(63):313-316.doi:10.5047/eps.2011. 11.001.
[5]Heki K.Observation of the lunar physical libration and tidal deformation by ILOM[C]∥Proc.Symp.on Tidal Studies in Tectonic Active Regions.Japan:[s.n.],2000:99-104.
[6]Petrova N,Hanada H.Computer simulation of observations of stars from the Moon using the polar zenith telescope of the Japanese project ILOM[J].Solar Sys.Res.,2013(47): 463-476.doi:10.1134/S0038094613060051.
[7]Yano T,Gouda N,Kobayashi Y,Tsujimoto T,Nakajima T,Hanada H,et al.CCD centroiding experiment for the Japan Astrometry Satellite Mission(JASMINE)and In situ Lunar Orientation Measurement(ILOM)[J].Publ.Astron. Soc.Pacific,2004(116):667-673.
[8]Hanada H,Araki H,Tazawa S,Tsuruta S,Noda H,Asari K,et al.Development of a digital zenith telescope for advanced astrometry[J].Science China(Physics,Mechanics &Astronomy),2012(55):723-732.doi:10.1007/s11433-012-4673-1.
[9]Funazaki K,Sato J,Taniguchi H,Yamada T,Kikuchi M, et al.Studies on controllability and optical characteristics of BBM for ILOM telescope[C]∥Proc.52th Symposium on Space Science and Technology.Japan:[s.n.],2008:3A12_ 1-4.
[10]Kashima S,Araki H,Tsuruta S,Hanada H.Application of DOE to the telescope for In-Situ lunar orientation measurement[C]∥Proc.Symp.Technologies on Astronomy 2012.Japan:[s.n.],2012:80-82.
[11]Hirt C,Bürki B.The digital zenith camera—a new highprecision and economic astrogeodetic observation system for real-time measurement of deflections of the vertical[C]∥Proc.3rd Meeting of the International Gravity and Geoid Commission of the International Association of Geodesy. Thessaloniki,Greece(ed.I.Tziavos):[s.n.],2002: 161-166.
[12]Li Z X,Li H,Li Y F,Han Y B.Non-tidal variations in the deflection of the vertical at Beijing observatory[J].J. Geodesy,2005(78):588-593.doi:10.1007/s00190-004-0421-2.
[13]Tsuruta S,Hanada H,Araki H,Asari K,Kashima S, Utsunomiya S,et al.Stellar imaging experiment using a mercury pool as a ground test of the telescope for in-situ lunar orientation measurements(ILOM)[C]∥Proc.14th Space Science Symposium.Japan:[s.n.],2014.
[14]Hanada H,Tsuruta S,Araki H,Asari1 K,Kashima1 S, Tazawa S,et al.Some technological problems in development of a small telescope for gravimetry[C]∥Proc.IAG Symp. on Terrestrial Gravimetry.Saint Petersburg,Russia:[s. n.],2014,inpress.
Hideo HANADA(1954—),男,副教授,博士生导师,主要研究方向:月球测量学,地球物理学。
通信地址:日本岩手县奥州市国立天文台
E-mail:Hideo.Hanada@nao.ac.jp
[责任编辑:宋宏]
Present Status of ILOM for Future Lunar Missions
H
ideo HANADA1,2,Seiitsu TSURUTA1,Kazuyoshi ASARI1,Hiroshi ARAKI1,2, Hirotomo NODA1,2,Shingo KASHIMA1,Ken-ichi FUNAZAKI3, Fuyuhiko KIKUCHI1,Koji MATSUMOTO1,2,Yusuke KONO2,4, Hiroo KUNIMORI5,Sho SASAKI6
(1.RISE Project,National Astronomical Observatory,Oshu,Japan;2.Department of Astronomical Science, The Graduate University for Advanced Studies(SOKENDAI),Mitaka,Japan;3.Faculty of Engineering, Iwate University,Morioka,Japan;4.Mizusawa VLBI Observatory,National Astronomical Observatory, Mitaka,Japan;5.Wireless Network Research Institute,National Institute of Information and Communications Technology,Koganei,Japan;6.Department of Earth and Space Science,Osaka University,Toyonaka,Japan)
We investigated basic characteristics of the telescope for In-situ Lunar Orientation Measurement (ILOM),such as the centroid accuracy and the effects of temperature change,tilt and ground vibrations,by laboratory experiments using a Bread Board Model and by simulations.We have a prospect to observe the lunar rotation on the lunar surface with the accuracy of 1 milliarcsecond.We will make test observations on the ground in order to evaluate overall characteristics with the target accuracy of better than 0.1 arcseconds.
Moon;ILOM;telescope;PZT;mercury pool
P1
:A
:2095-7777(2014)03-0200-05
10.15982/j.issn.2095-7777.2014.03.006
2014-07-25
2014-08-05
先端技术中心项目(2013-031);JSPS科研补助金(A)(20244073);JSPS日本-俄罗斯双边合作项目(14037711-000085)
