基于双机直流拖动的智能配电系统自动开关系统设计
2014-03-05张少敏
贺 斌,张少敏
(1.华北电力大学控制与计算机工程学院,河北保定071003;2.九原电力有限责任公司,内蒙古包头014060)
1 引言
随着现代技术的发展,交直流电机被广泛应用于现代建筑中。但是,很多直流电机的控制还是采用早期的控制方法,即通过控制台上的按钮,通过接触器控制交流电机。可这种控制方式并不能实现自动控制,且控制精度和效率都不高,不符合现代建筑配电系统自动化控制的要求。对于直流电机控制策略的研究成为一个热门课题。
针对这方面文章设计了基于双机直流拖动的自动控制系统,运用转速位置控制方法对两个小功率直流电机进行控制,有效地实现了自动控制,并具有很强的抗干扰性。文章详细分析了转速位置控制思想,并将其运用到双直流电机拖动系统中,以期达到抗扰能力强、所需功率小、运行时间短、控制精度高的目标。
2 双机直流拖动电控系统分析
2.1 被控对象数学模型的建立
控制对象是一个复杂的机电传动装置,属于多轴传动系统,通过相应的折算,把它简化为单轴系统。而作为单轴系统,控制对象实质上就变为直流电机,与不加传动机械的直流电机相比,这个折算后的单轴直流电机只是在转矩和转动惯量不同。既然控制对象是直流电机,只要确定电机的各个参数,把传动机械的转矩和转动惯量折算到直流电机轴上,就可以得到控制对象的数学模型,即经过折算的直流电机模型。
根据直流电机的动态方程和动力学方程联立,可得到下面的的直流电机的动态结构框图1:
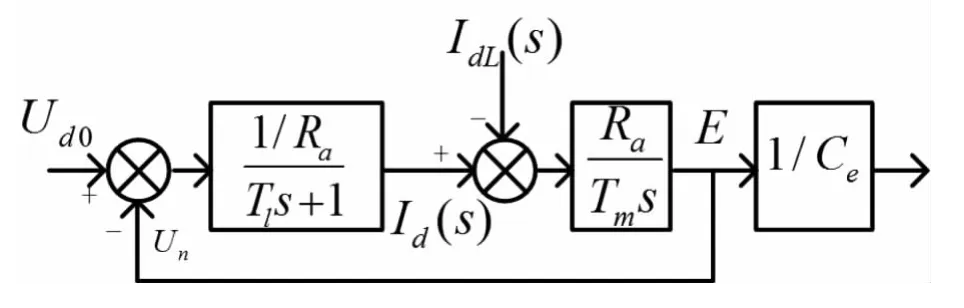
图1 直流电动机的动态数学模型
2.2 系统控制原理
所设计的双机直流拖动电控系统,实质上是一个直流调速系统,通过调节电枢电压来实现直流电机调速。使用最常见PWM变换器的H桥式可逆电路,实现对直流电机的PWM控制驱动。对于系统来说,电机一般只运行于一、三象限,对制动、重复性的正负转的要求低,正常运行时的速度也不低。单极性PWM驱动相比于双极性PWM驱动,更适合我们的系统。
在单闭环速度PI控制的基础上,设计了基于标准行程的位置调节方法。其原理是,根据最初设置的运行的速度,绘制一个标准的行程曲线,通过反馈回来的位置信号,对比该时刻,标准行程曲线的位置。当反馈回来的位置小于标准行程,则加大电机的速度给定;反之,减小速度给定。这样,我们的电机就可以按照标准行程曲线运行了。
结合转速单闭环直流调速,控制系统的组成原理图如下:
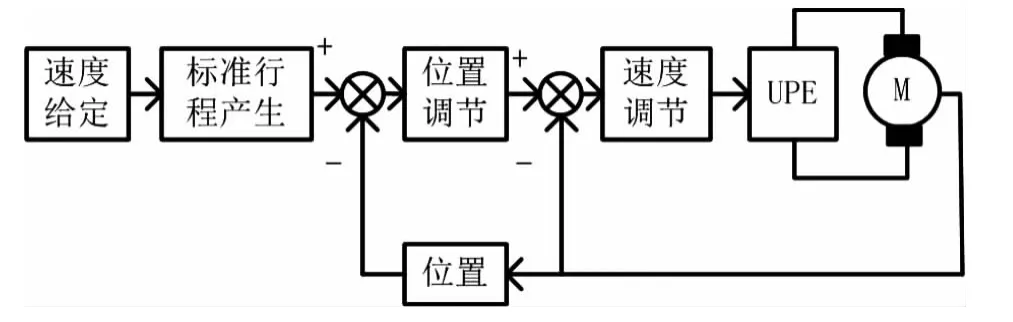
图2 速度位置闭环控制原理图
速度给定通过标准行程产生,得到某时刻的标准位置,采样此时的电机运行位置,得到位置偏差通过位置调节器后,输出速度给定,从而开始进行我们的速度调节。整个系统的结构相对简单,而且转速、位置的反馈信号为同一信号,只是处理方式不同。
3 仿真结果及分析
电机的方针参数如下:转动惯量 J=0.000248kg*m2,电枢电阻 Ra=7.27Ω,电动势系数Ce=0.00516V*min/r,电枢电感 La=0.0024H,给定转速2130r/min。基于此,在Matlab环境下仿真,为了使电机偏离正常的行程。我们给电机2加一个宽度为1s,幅值为3A的强干扰负载。验证在这样的情况下,位置调节器是否可以使系统恢复正常运行。为了使电机偏离正常的行程。我们给电机2加一个宽度为1s,幅值为3A的强干扰负载。
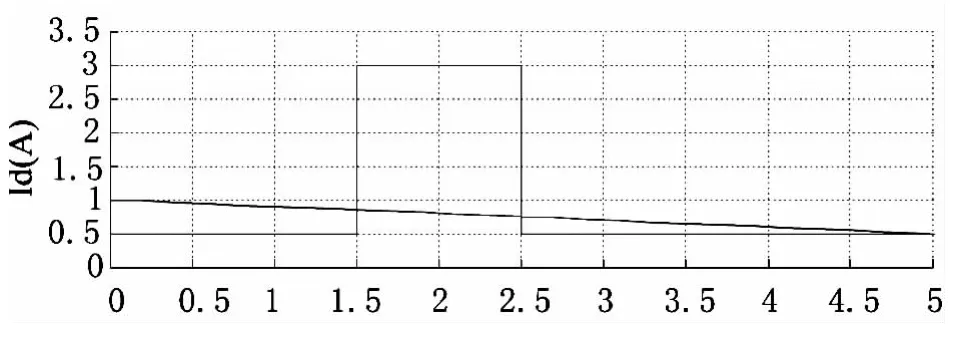
图3 斜坡负载和脉冲负载
电机1的负载是斜坡负载,而电机2的负载为脉冲负载,0 到 1.5s时负载为 0.5A,1.5 到 2.5s出现了一个3A的干扰负载;之后,负载恢复至0.5A。通过仿真,仿真时间为5s,可得转速,电流,位置偏差的相关曲线如图4所示。
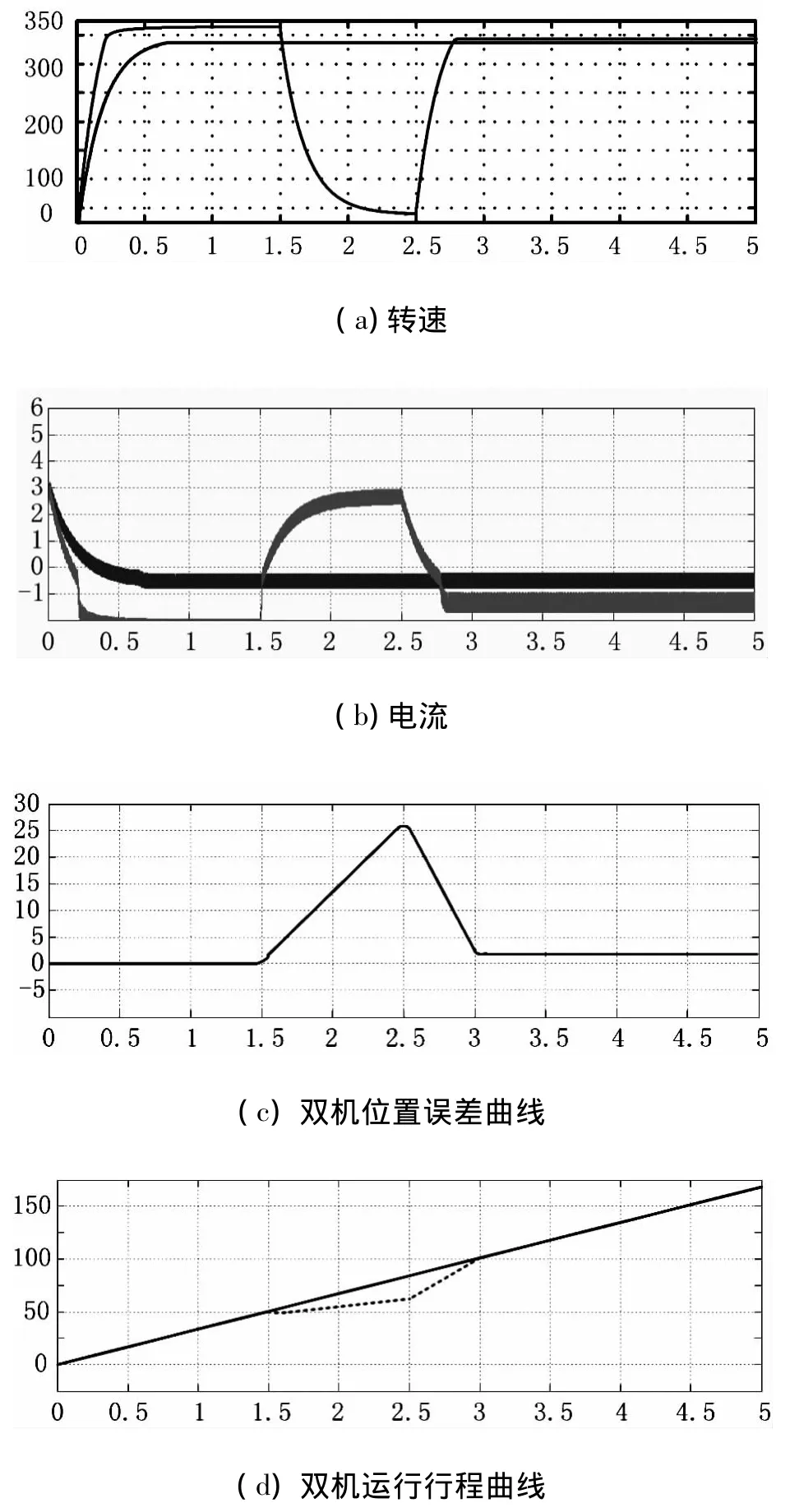
图4 坡、脉冲负载条件下的系统响应曲线图
通过图4的各仿真曲线,可知斜坡负载的直流电机1运行正常。直流电机2在1.5s受到的强干扰后,转速迅速下降,电流迅速上升,两电机的位置偏差也开始增大,一直上升到26r;2.5s后干扰结束。在位置调节的作用下,转速快速增加,位置偏差也开始减小。经过1s的时间后,位置偏差已经恢复至允许范围,这说明位置调节还是具有一定的抗干扰能力的。对于因多次干扰或是机械故障等原因而造成各电机间的行程偏差过大,以至于超过设计要求中规定值的情况,需在软件中去实现相应的故障保护。经过仿真,可以说明转速位置的闭环控制方法是可以到达系统的设计要求的。
4 系统硬件与软件设计
4.1 系统硬件设计
根据系统的设计要求,双机直流数字控制器的硬件组成框图如图5所示。
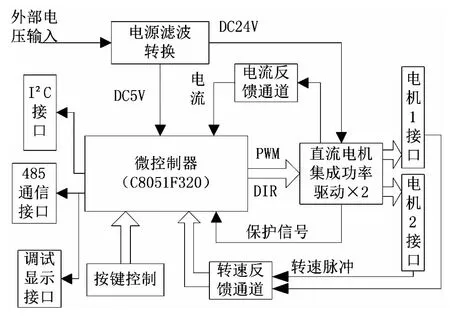
图5 双机直流数字控制器硬件组成框图
整个系统按照功能可分为7个模块:
①中央处理模块:由C8051F320组成的最小系统。包括C8051F320复位电路、下载调试接口、以及相应的引脚功能分配。
②电机驱动模块:采用的是直流电动机集成驱动芯片LMD18200。包括了LMD18200的控制信号输入通道、电流检测输出、过热保护。
③反馈电路模块:反馈电路包含两个方面,一是对转速、位置脉冲的隔离整形电路,二是对LMD18200中输出的采样电流进行处理的电路。
④供电模块:完成输入的24V滤波和到5V的电压转换。
⑤通信控制接口:根据设计要求对通信控制接口的要求。我们设计了I2C通信和485通信的接口。
⑥显示模块:利用系统的串行通信,将系统的运行信息通过串行接口送到外部的显示模块显示出来。外部的显示模块是由AT89S52单片机,1602液晶显示、按键控制、LED蜂鸣器组成的一个简单的单片机系统。
4.2 系统软件设计
按照增量式编程的方法,我们需要设计一个主程序模块和若干功能子模块,然后让主程序模块调用各功能模块,来实现系统所要求的功能。其中主程序模块是最为重要的,它负责调度,分配各个模块提供的资源和方法,最终实现系统要求。根据我们系统要求,我们主程序模块需要完成对直流电机速度闭环PI调节,位置的比例调节,外部通信控制和电机内部通信。
4.2.1 系统软件模块的划分
根据C8051F320单片机的硬件功能,和控制需要划分模块。具体的模块划分如下:
①主程序模块,实现对电机速度闭环PI调节,位置的比例调节,外部通信控制和电机内部通信;
②键盘扫描模块,对多个非编码键盘进行扫描,返回一个按键键值;
③PI调节模块,实现带限幅的位置式PI算法;
④PWM输出和测速模块,初始化设置8位分频率的PWM输出。对有电机输入的转速脉冲进行处理,并可完成看门狗初始设置;
⑤通用串行通信模块,实现控制器与其它设备之间的串行通信通道,其通信方式遵循自定义的电机控制通信协议;
⑥ADC采样模块,对相应的模拟输入管脚的适当范围的模拟信号进行ADC转换或是窗口保护;
⑦I2C通信模块,用I2C总线的方式为电机内部通信提供的通信通道。
4.2.2 主程序的设计
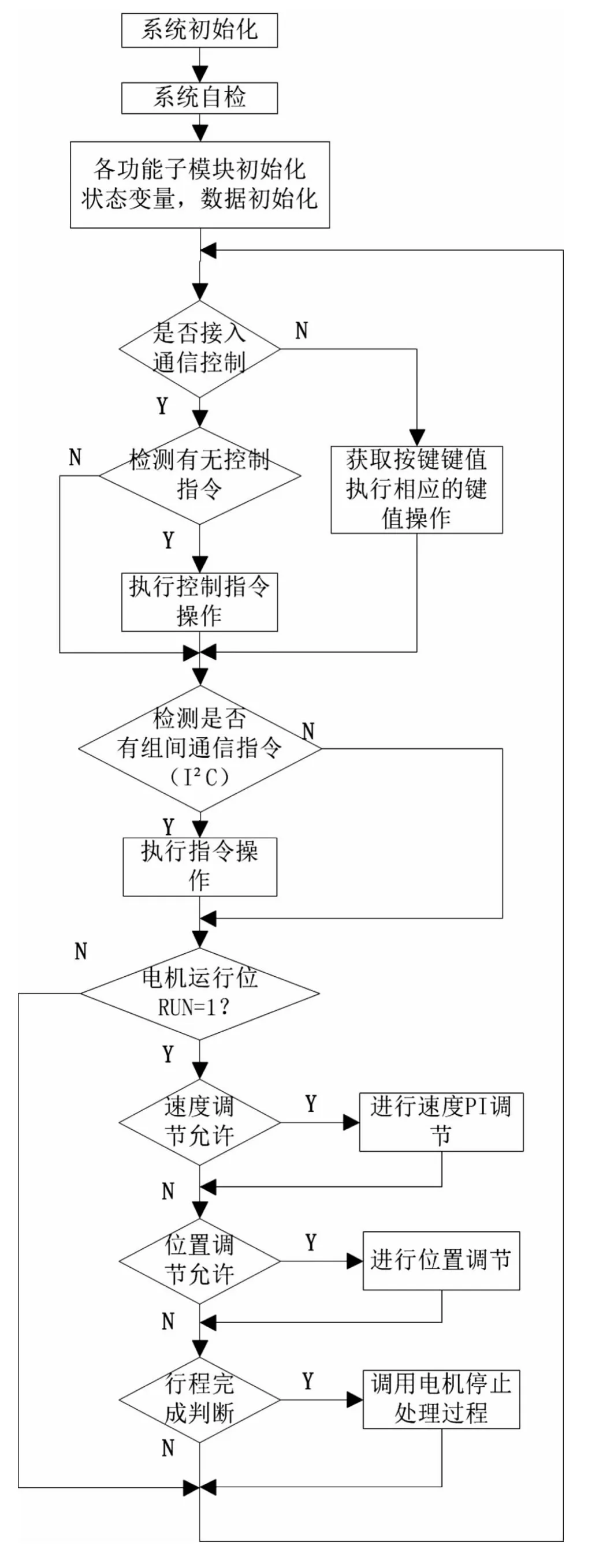
图6 主程序流程图
主程序模块的流程图如图6。主程序的运行方式:对于我们这个还不算复杂的嵌入式系统,一般把程序前台程序和后台程序两部分。整个应用程序是一个无限循环,后台程序在不断的循环中检查每个任务是否具备运行条件,如果具备条件则调用相应的程序实现相应的操作;前台程序通过中断来处理紧急事件。这个程序结构通常被称为前后台系统。系统的前台程序主要包括:
①系统定时采样中断子程序,用于标志速度调节,位置调节的使能;
②串行和I2C通信接收中断子程序:用于标志相关指令接收的使能;
③测速,位置的PCA中断处理函数:通过输入的速度、位置脉冲,处理得到速度和位置数据,提供给主程序使用。
4.3 实验测试
电机在2130r/min,500r和3000r/min和1000r的情况下,以及有无干扰负载和有无位置调节情况下,测量电机从启动到电机运行完设定行程后停下所需的时间,来测试系统的一个总体运行状况。其测试结果如表1:
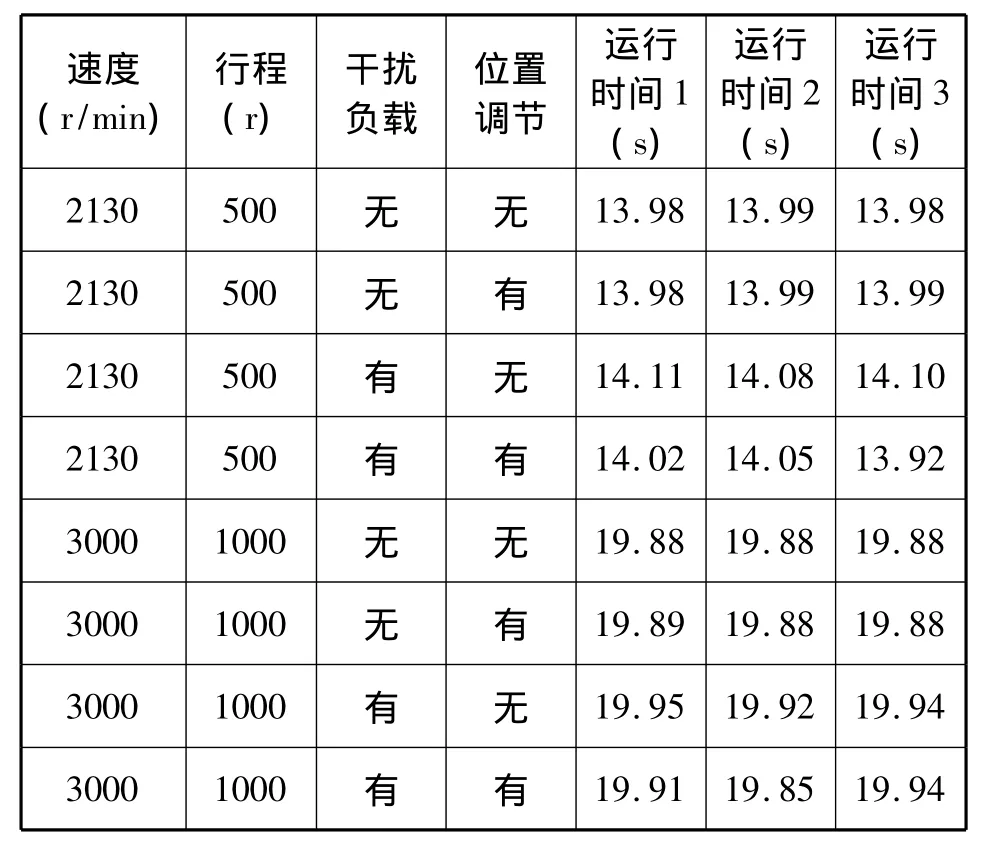
表1 系统总体运行状况的测试表
从上表的测试结果可以看出,有位置调节的控制系统的的整体运行时间的偏差更小,也更稳定,满足系统的基本设计要求,并有一定的抗干扰能力。
5 结论
根据现代建筑配电系统智能化的要求,针对直流电机的控制现状,设计开发了一种基于转速位置控制策略的双机直流拖动控制系统。文章从三个方面进行了研究:1)控制模型建立及控制思想分析;2)仿真验证控制思想的运用;3)实验检验控制系统的合理性。说明设计实现抗扰能力强、所需功率小、运行时间短、控制精度高的设计要求,为楼宇天窗自动控制提供了一种参考方法。
[1] 王晓明.电动机的单片机控制(第2版)[D].北京航天航空大学出版社,2007,8.
[2] 肖金凤,盛一发,徐祖华.模糊-PID混合控制直流电机调速系统设计[M].微电机,2011,5(44):56 -59.
[3] 邵雪卷,张井岗,赵志成.双闭环直流调速系统研究[M].电子电气教学学报,2007,(30):75-77
[4] 赵大奇,直流调速器在双机同轴拖动系统中的应用[M].设备管理与维修2005(12):20-23.
[5] 李欣,萨如拉.基于双机直流拖动的自动开关系统设计[M].电子世界.2014(1):145-147
[6] 刘霞,李俊林.直流调速器同步控制模式的应用[M].冶金自动化,2007(5):49-51.
[7] Zhao Jun.Control technique of sensorless brushless DC motor on C8051F320[M].Small& Special Electrical Machines.2008(36):41 -43.
[8] Kara,I.Eker.Nonlinear closed - loop direct identification of a DC motor with load for low speed two-directional operation[M].Electrical Engineering.2000,(1):440 -445.
