基于地磁信息的火箭弹滚转角测量系统研究
2014-02-27卢志才贾春宁
卢志才,高 敏,贾春宁
(1.军械工程学院导弹工程系,河北 石家庄 050003;2.总装备部驻上海地区军代室,上海 209109)
基于地磁信息的火箭弹滚转角测量系统研究
卢志才1,高 敏1,贾春宁2
(1.军械工程学院导弹工程系,河北 石家庄 050003;2.总装备部驻上海地区军代室,上海 209109)
在火箭弹飞行过程中,为实现火箭弹弹道修正,需实时解算弹体的滚转角。该文根据地磁场基本特性和火箭弹飞行过程中姿态变化关系,通过姿态变换矩阵,建立滚转角解算数学模型。搭建基于地磁信息的滚转角测量系统,采用两轴磁传感器测量地磁场矢量,辨识火箭弹滚转姿态信息。滚转角系统在火箭弹上进行飞行搭载试验,结果表明,利用地磁得到的解算滚转角线性度良好,与陀螺测得的弹体旋转速度相匹配,能够满足火箭弹弹道修正的要求。
火箭弹;弹道修正;磁传感器;滚转角
0 引 言
为提高火箭弹的射击精度,减小附带的非控制毁伤,随着低成本磁传感器器件的发展,国内外都在研究不改变火箭弹气动外形的条件下如何对火箭弹弹道进行修正,而弹道修正过程需要测量火箭弹的滚转姿态。
地磁传感器由于价格便宜、无积累误差、抗高过载等优点受到越来越多的重视[1-2],利用磁阻传感器来测量火箭滚转姿态是近年来测量领域的热点之一。美国极为重视提高火箭弹的射击精度,在多管火箭武器系统(MLRS)项目中对众多地面战斗装备进行改造升级,为其陆军转型提供重要保障[3]。德国研制的康特拉夫斯-莱茵金属公司增强型弹道修正模块(CORECT)采用了基于脉冲矢量推力的弹道修正方式。CORECT模块集成了GPS接收机,利用GPS计算火箭弹在飞行过程中的位置,采用弹载的磁场传感器,通过测量地球磁场,计算弹丸的滚转姿态角。
基于以上数据,弹载计算机计算出火箭弹偏离理论飞行弹道的偏移量,通过实时启动脉冲推冲器产生推力,修正火箭弹的弹道。该模块已在227 mm多管火箭系统火箭弹试验成功,其命中精度(圆概率误差)由常规无控火箭弹的数百米降低到50 m以内[4]。
本文通过姿态变换矩阵,建立了滚转角解算数学模型,并根据此数学模型搭建了基于地磁信息的滚转角测量系统。
1 弹体滚转角姿态解算模型
地磁场是指地球表面或地球空间的磁场,在地面上平均磁感应强度约为0.5Gs(1Gs=10-4T)。地磁场由变化磁场和稳定磁场组成,其中变化磁场约占总磁场的2%~4%。某型火箭弹最大射程约为34km,在该射程内地磁场是相对不变的,其磁场强度为H,地磁场存在磁倾角I和磁倾角D,如图1所示,地磁场在地理坐标系投影分量为HN、HE、HD。
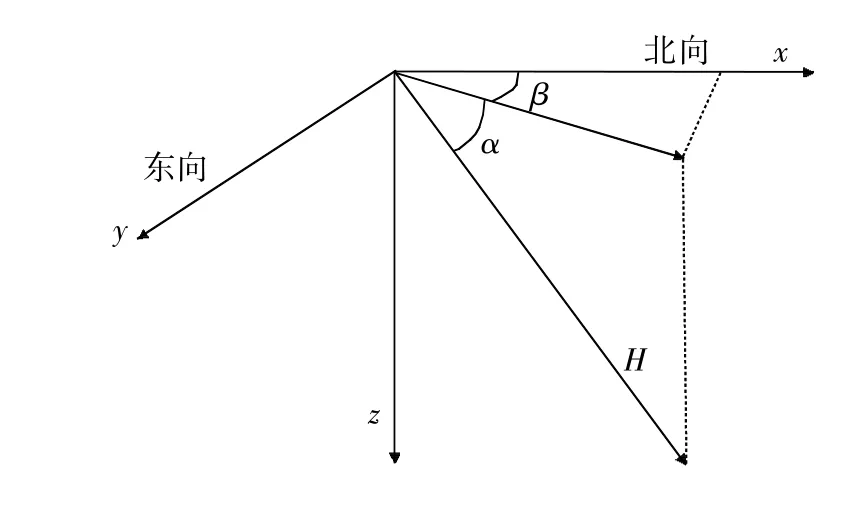
图1 地磁要素的关系
为解算弹体滚转角,建立弹体坐标系Oxyz,Ox轴与弹体纵轴重合,指向弹体头部为正,Oy轴、Oz轴位于弹体横切面内。在弹体内安装相互正交的三轴磁传感器,其中一个传感器敏感轴与x轴重合,地磁场在该方向上分量为Hx,一个传感器敏感轴与y轴重合,地磁场在该方向上分量为Hy,另一传感器测量的地磁场分量为Hz,弹体坐标系与地理坐标系之间的关系如图2所示。
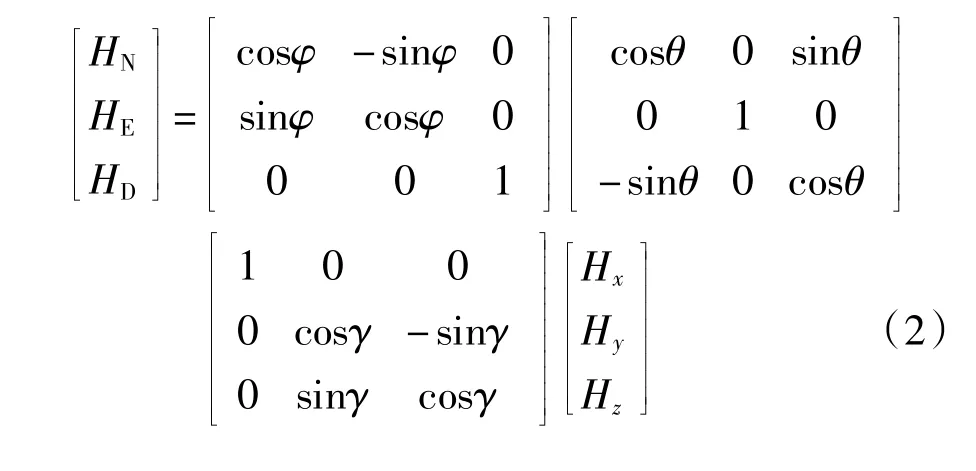

图2 坐标系及其关系
式中:φ——航向角;
θ——俯仰角;
γ——滚转角,地磁场分量(HN、HE、HD)与磁偏角和磁倾角有关。
航向角φ在火箭弹射程内可以近似视为一个常量。弹体滚转角γ不断发生变化使得三轴磁传感器输出(Hx,Hy,Hz)也随之发生变化,解算滚转角可得[5-6]:

将式(1)代入式(3)中,可得:
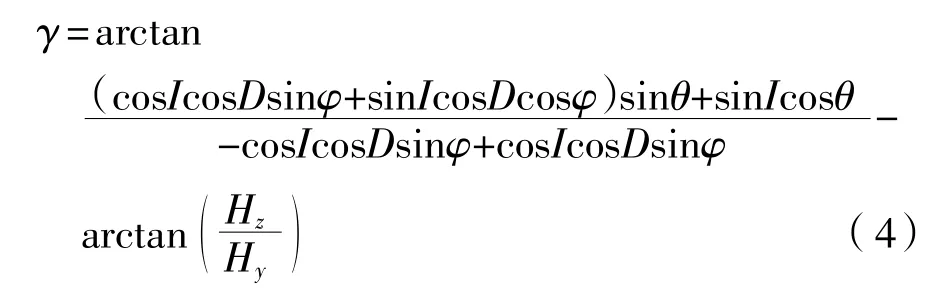
从式(4)第一项中可得弹体滚转角与地磁场磁偏角、磁倾角以及火箭弹弹道倾角和航向角有关,火箭弹发射前装订磁偏角和磁倾角以及航向角,弹体弹道倾角通过加速度计测量;由第二项可得滚转角与弹体横切面上两轴磁传感器测得的磁场强度有关。
2 地磁测量系统的设计与实现
2.1 总体设计
整个弹道修正系统工作流程如图3所示,其中磁传感器测量地磁场分量,将测得结果送至弹载计算机,弹载计算机利用装定数据,根据本文的算法对滚转角进行解算,从而确定推冲器的方位,适时起爆推冲器,进行弹道修正。
其中,滚转角测量组合需要二维磁传感器提供弹体切面上相互正交的地磁场分量测量值。而目前传感器测量地磁场的实现有许多方式,诸如:磁通门、线圈、磁阻传感器、巨磁阻传感器等,目前工程应用较多为磁通门和磁阻传感器,其中磁通门测量精度
较高,但其结构复杂、体积偏大、响应时间较慢,而磁阻传感器具有体积小、响应快、抗过载能力强的优点,适于弹道修正系统上进行应用。

图3 弹道修正系统框图
磁阻传感器在不同的应用领域所需的测量精度不同,本系统综合测量精度、体积、成本、抗过载能力等指标,确定磁阻传感器的设计指标要求:俯仰角范围-60°~60°,航向角范围0°~360°,综合上述因素,本设计选用的HMC1022磁阻传感器作为测量元件。
2.2 滚转角测量模块硬件设计
滚转角测量模块主要由磁阻传感器、置/复位电路、信号调理电路、数据采集模块、DSP模块以及Flash模块组成,原理框见图4。
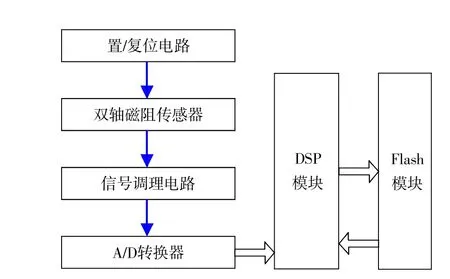
图4 滚转角解算系统原理框图
其中,DSP模块本系统采用TI公司生产的高端DSP芯片(TMS320C6713),该芯片为64位浮点数字微型处理器,处理速度高,其主频最高可达300 M,并且有丰富的外围接口,该型DSP芯片采用双电源供电方式,即内核与I/O均需供电,本系统使用了其强大的EMIF功能与外围器件进行通信,其中DSP模块与Flash模块之间通信方式为I2C协议。
磁阻传感器需要置/复位电路,该电路是为实现对磁阻传感器的磁矩校准设计的,地磁场信号为弱信号,易受外界干扰,受干扰后,磁传感器的输出特性会发生较大改变,甚至不能正常工作[7-8】,置/复位电路用IRF7509集成的场效应管,由DSP模块出发,产生一个约为2A的大电流对磁阻传感器进行置复位。
信号调理电路实现对磁阻传感器测得的信号进行放大、滤波处理,本系统使用的器件为AMP04,其参考电压为2.5V。为保证滚转角解算精度,A/D采样器使用了24位A/D转换器ADS1246,采样频率为2kHz,满足采样定理要求。
2.3 滚转角测量模块软件设计
在软件设计中,热电池激活系统开始工作,首先弹载控制器完成初始化,并向磁阻传感器发出置/复位指令,传感器测量地磁场信号,经信号调理后进行数据采集,再根据装定数据进行滚转角解算。软件流程如图5所示。
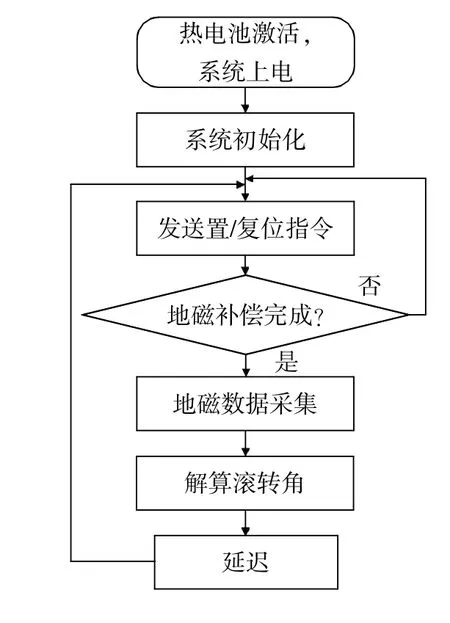
图5 滚转角解算系统软件软件流程图
3 火箭弹滚转角解算飞行试验
在某常规武器试验中心进行了122火箭弹科研摸底飞行,基准射向偏离磁北方向,当地磁偏角为350.90°,基准射向为3.4692°,基准射向偏离磁北约12.6°,在弹道飞行时间20 s开始,对火箭弹横向偏差进行修正,过顶点后,对其纵向偏差及综合偏差进行修正。
弹道高度曲线见图6。图7为陀螺测得的火箭弹转速,火箭弹的最大转速约为15 r/s,最小转速约为5r/s。
在弹体横切面上安装两轴磁传感器,滚转角测量系统采样率为100Hz,火箭弹发射前,对火箭弹姿态角所需参数进行装订,弹载电池供电后,弹载记录仪开始工作,存储传感器测得的数据。采用弹道修正弹记录仪数据进行分析,绕心运动参数测量结果如图8所示。

图6 飞行时间-火箭弹弹道高度曲线
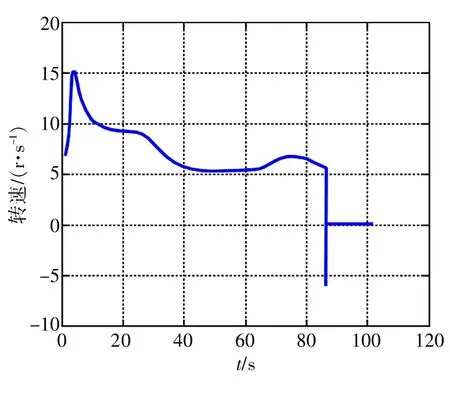
图7 飞行时间-火箭弹转速曲线

图8 飞行时间-滚转角曲线

图9 飞行时间-滚转角曲线
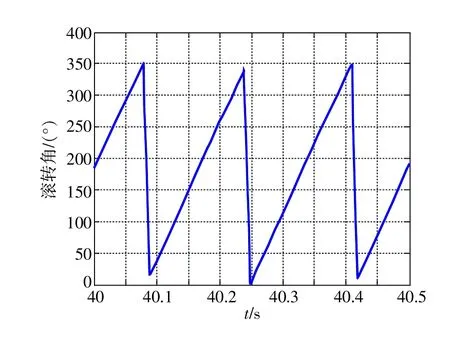
图10 飞行时间-滚转角曲线
弹道修正火箭弹横向修正起控时间为20 s,从图8可知,该时间点处,地磁传感器解算的滚转角线性度良好,反算的火箭弹转速约为9.5r/s,与陀螺测得的转速基本一致。
从图9可知,30 s处,地磁传感器解算的滚转角线性度良好,反算火箭弹转速约为7.7r/s,与陀螺测得的转速基本一致。
从图10可知,40s处,地磁传感器解算的滚转角线性度良好,反算火箭弹转速约为5.9r/s,与陀螺测得的转速基本一致。
试验数据表明,在火箭弹飞行控制时间段内,利用地磁数据解算的滚转角与陀螺测得的数据相比,误差在4°以内,满足火箭弹修正系统对姿态角测量的要求。
综上所述,利用地磁传感器测量地磁场解算滚转角,该方法在飞行试验中得到了充分的验证,方案可行措施有效。
4 结束语
在火箭弹滚转角适时解算中,本文通过姿态变换矩阵,建立了滚转角解算数学模型,并根据此数学模型搭建了基于地磁信息的滚转角测量系统。该系统在某型火箭弹飞行试验中得到了应用,能够满足火箭弹弹道修正对姿态角测量的工程要求。
[1]丁传炳,王良明,常思江.GPS/INS组合导航在制导火箭弹中的应用[J].火力与指挥控制,2010,35(11):138~141.
[2]赵捍东,曹红松,朱基智,等.基于磁强计和陀螺的姿态测量方法[J].中北大学学报:自然科学版,2010,31(6):632-635.
[3]Hansung L,Kwangjin K,Heeyoung P,et al.Roll estimation ofasmartmunition using amagnetometer based on an unscented Kalman filter[C]∥Proceedings of the AIAA Guidance,Navigation and Control Conference and Exhibit.Honolulu.Hawaii:AIAA,2008:1-13.
[4]Litmancvich Y A,Lesyuchevsky V M,Gusinsky V Z. Two new classes of strap down navigation algorithms[J]. Guidance Control and Dynamics,2000,23(1):33-34.
[5]苟秋雄,刘明喜,李虎军.基于磁阻传感器的末制导迫击炮弹滚转姿态初始对准技术研究[J].弹箭与制导学报,2008,28(3):46-47.
[6]毛泽华,曹红松.地磁/陀螺复合测姿的模块化分析误差补偿方法[J].探测与控制学报,2011,33(6):60-64.
[7]王勇,陈家斌,刘志德,等.弹体姿态估计数据融合算法研究[J].北京理工大学学报,2011,31(5):534-536.
[8]王解先,李浩军.磁偏角与磁倾角公式推导与运算[J].大地测量与地球动力学,2009,29(3):89-90.
Flight attitude angles measurement system of rocket projectile based on geomagnetic field
LU Zhi-cai1,GAO Min1,JIA Chun-ning2
(1.Missile Engineering Department,Ordnance Engineering College,Shijiazhuang 050003,China;2.Military Representative Office of Army in Shanghai,Shanghai 209109,China)
In order to correct the trajectory of the rocket projectile,the attitude angle needed to be calculated in real-time.The aim of the research was to provide a solution for roll angle determination in the presence of magnetic field disturbance.During rocket flight,the geomagnetic field component changed in each sensor as the result of the changed Euler angle.The attitude angle computational formula was designed according to the transformation matrix.For measuring the roll angle,two-axis magnetic sensor was utilized to measure the geomagnetic field in the article.The guidance scheme by roll angle was proposed according to geomagnetic data and the starting control point parameters were also designed properly.The method was employed in the rocket projectile trajectory correction experiment.And roll angular counted by the method could satisfy the demand for trajectory correction.
rocket projectile;trajectory correction;geomagnetic detection;roll angle
TJ71;TP212.1;TP274+.2;TM930.12
:A
:1674-5124(2014)03-0001-04
10.11857/j.issn.1674-5124.2014.03.001
2013-04-08;
:2013-05-16
军械工程学院基金项目(YJJXM13020)武器装备预研基金项目(9140A05040213JB34001)
卢志才(1982),男,河北衡水市人,讲师,博士,主要从事地磁测量方面研究。
