双柔性空间机械臂动力学建模与控制
2014-02-23杨永泰荣吉利李健刘宾胡成威
杨永泰,荣吉利,李健,刘宾,胡成威
(1.北京理工大学 宇航学院,北京100081;2.广西科技大学 汽车与交通学院,广西 柳州545006;3.中国空间技术研究院,北京100094)
0 引言
空间机械臂作为航天器上一种重要的工具,可以完成释放、回收卫星以及空间站的在轨装配、维修等各种任务,并可以作为航天员出舱工作的辅助工具,甚至替代航天员的部分工作,从而提高航天员的舱外工作能力及在轨操作的安全性[1]。空间机械臂的机械部分主要包括关节和臂杆。关节主要包括:电机、传动装置、运动轴系、传感器等;臂杆的制造往往采用轻质材料,例如碳纤维等。关节柔性以及臂杆柔性,都是不可忽略的。为了研究空间机械臂的动力学特性并且实现精确控制,建立包含关节柔性以及臂杆柔性的空间机械臂精确动力学模型,具有十分重要的意义。
在机械臂柔性关节建模方面,Spong 等[2]首次对其进行简化,提出“转子-扭簧系统”模型。在此基础上,Bahrami 等[3]将关节假设为“线性扭簧-阻尼”模型。于登云等[1]对空间机械臂关节动力学建模方法的发展过程和研究成果进行了总结。在柔性臂杆建模方面,大多数研究者[4-5]均采用拉格朗日方程以及假设模态法进行建模。但是,该方法首先需要通过计算臂杆的模态,然后进行模态截断;并且,假设模态法仅仅适用于臂杆的小变形。将描述柔性构件的绝对节点坐标方法[6]与描述刚体的自然坐标方法[7]相结合,可以形成研究刚-柔多体系统动力学的绝对坐标方法[8-9]。利用绝对坐标方法推导得到的刚-柔多体系统动力学方程的质量矩阵为常数矩阵,不存在科氏力和离心力,并且还可以得到简洁的系统约束方程表达式,不仅适用于柔性体的小变形问题,也能得到大变形的精确结果。
本文采用自然坐标法对柔性关节进行动力学建模,采用绝对节点坐标法对柔性臂杆进行动力学建模,最终得到了柔性关节柔性臂杆空间机械臂的动力学方程,为指标3 的微分代数方程组。采用5 次多项式对关节轨迹进行规划,并通过逆动力学得到关节驱动力矩,将其作为前馈输入;采用PID 控制策略作为反馈输入,这就形成了前馈-反馈联合控制策略。在二连杆柔性关节柔性杆机械臂上进行仿真,验证了该控制策略的有效性。
1 机械臂动力学建模
如图1 所示,为二连杆柔性关节柔性杆机械臂示意图,包含2 个关节和2 个臂杆。
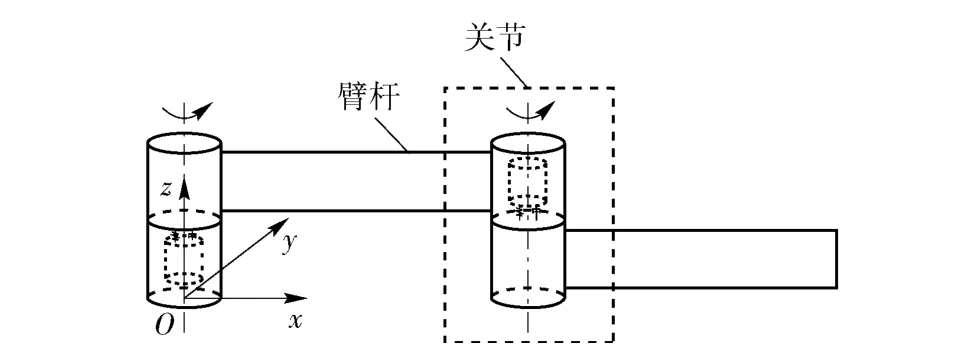
图1 二连杆柔性机械臂Fig.1 Two-link flexible manipulator
自然坐标法中存在多种不同的广义坐标选取方法[7]。如图2 所示,选取刚体上2 个固定点的位置矢量和2 个单位矢量作为广义坐标,称之为“两点两矢”坐标形式,这是最经典的自然坐标形式,该刚体具有12 个广义坐标:

式中:ri、rj分别表示刚体上i 点、j 点的位置矢量;u、v 分别表示固结于刚体上的单位矢量。
刚体上任意一点P 的位置矢量可表示为

式中:C=[(1 -c1)I3c1I3c2I3c3I3],为单元的形函数,c1、c2、c3为局部坐标分量,I3为3 阶单位矩阵。
通过虚功原理,可得到自然坐标法(NCF)描述的刚体常数质量矩阵:

式中:ρ 表示刚体的密度;V 表示刚体的体积。
采用自然坐标的“两点两矢”经典坐标建立柔性关节动力学模型。关节包含2 个壳体和1 个电机转子,它们共轴;并且将电机转子和壳体简化为“扭簧-阻尼”系统。
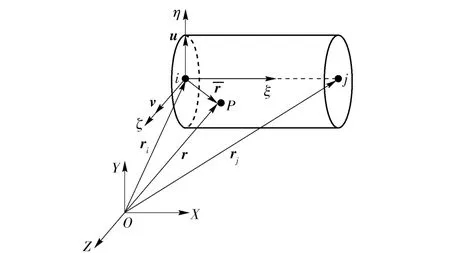
图2 自然坐标描述的空间刚体Fig.2 Space rigid body described by NCF
如图3 所示,在电机转子和电机壳体上分别建立NCF 坐标,并用qm和qs分别表示电机转子和电机壳体的NCF 坐标。由qm和qs可得到电机转子和关节壳体的转角θm、θs,及其角速度电机通电后驱动,带动关节壳体转动,关节壳体受到的力矩为

式中:Kt为扭转刚度系数;Kd为阻尼系数;Kt、Kd一般通过实验手段测得。本文暂不考虑电机转子所受摩擦力等。
电机转子受到的力矩为

式中:τ 为电机转子受到的驱动力矩,与电流大小有关。
面对这份要求和重担,研究院党委结合所面临的工作环境,由班子成员带队深入各研究所与机关科室,开展了“访基层、讲形势、聚人心、促工作”集中宣讲,宣讲形势任务和上级政策要求,了解职工思想动态;编发了形势任务教育宣传材料,开展“跨越重大关口,决胜扭亏为盈”形势任务教育;使大家充分认清形势,明确研究院在分公司的定位,增强荣誉感,强化担当意识,在全院干部员工心目中树立和固化“公司增效责任在我,公司发展我来担责”的责任心,鼓励员工以不服输、争口气的劲头,把基础研究工作做得更扎实、更细致、更务实,努力打好翻身仗。
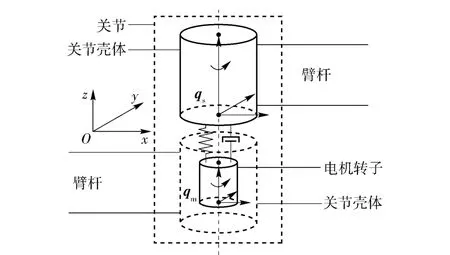
图3 自然坐标法描述的柔性关节Fig.3 Flexible joint described by NCF
柔性臂杆采用Shabana 等[10]与Yakoub 等[11]提出的基于绝对节点坐标的三维二节点梁单元进行离散,如图4 所示。该梁单元有2 个节点,每个节点上有1 个位置矢量和3 个斜率矢量,单元共有24 个广义坐标:

式中:ri、rj分别表示i 点、j 点的位置矢量;ri,x、ri,y、ri,z分别表示ri对x、y、z 的偏导;rj,x、rj,y、rj,z分别表示rj对x、y、z 的偏导;x、y、z 分别为单元的局部坐标。
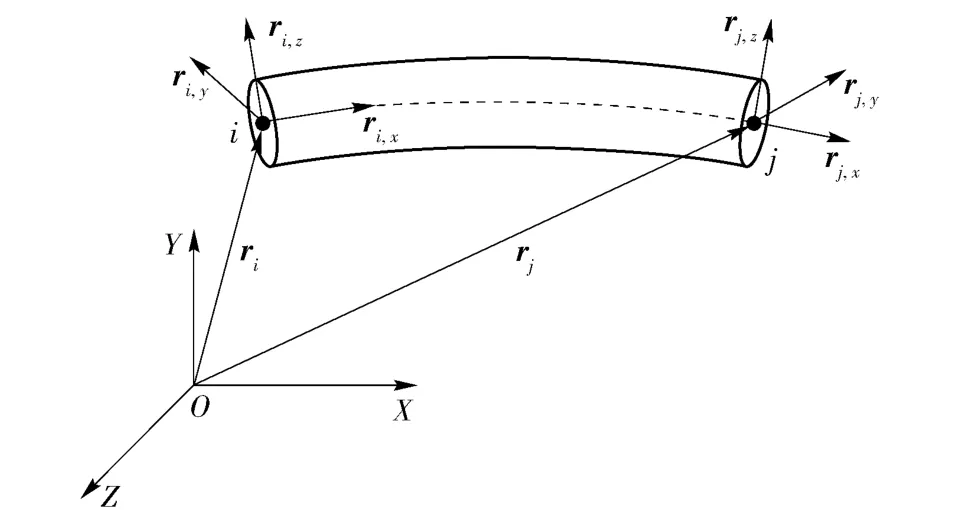
图4 绝对节点坐标法描述的三维二节点梁单元Fig.4 Three-dimensional beam element of two nodes described by ANCF
单元上任意一点P 的位置矢量为

S 为单元的形函数:

式中:I3为3 阶单位矩阵;s1=1 -3ξ2+2ξ3,s2=ξ -2ξ2+ξ3,s3=η -ξη,s4= ζ - ξζ,s5=3ξ2-2ξ3,s6=-ξ2+ξ3,s7=ξη,s8=ξζ,ξ =x/l,η =y/l,ζ =z/l,x∈[0 l],l 为单元初始长度。
采用自然坐标法以及绝对节点坐标法建立的刚柔耦合多体系统动力学方程为指标3 的微分代数方程组:

式中:M 为系统质量矩阵;q 为系统广义坐标;C 为系统约束方程;Cq为系统约束方程对广义坐标的Jacobi 矩阵;λ 为拉格朗日乘子;Q 为系统广义外力;F 为系统广义弹性力。绝对节点坐标法描述的三维二节点梁单元弹性力及其Jacobi 的计算,参见文献[12 -13]。上述各项按照传统有限元方法的单元组装策略进行单元组装。
2 前馈-反馈控制策略
在工程上,往往采用多项式对关节轨迹进行插值,包括3 次多项式以及5 次多项式等。若关节的位置速度 以及加速度 的初始状态(t =0)以及结束状态(t=tf)为
式中:θ0、θf分别表示关节的初始角度、最终角度;tf表示运动规划时间。
为满足上述6 个边界条件,采用5 次多项式对每个关节轨迹进行规划:

由(10)式描述的6 个边界条件,可惟一确定多项式系数ai(i=0,1,…,5);经过整理,最终得到关节轨迹为

对(12)式进行求导,可得到关节速度以及加速度:
在工程实际中,关节的最大速度是受到限制的。因此,在确定了关节的初始角度θ0以及最终角度θf后,应适当地选择规划时间tf,以保证关节的最大角速度不超过规定值。
由规划好的关节轨迹,根据逆动力学,得到各个关节的驱动力矩,作为前馈输入;采用PID 控制策略作为反馈控制,形成前馈-反馈联合控制策略。关节控制器设计如图5 所示。

图5 前馈-反馈联合控制策略Fig.5 Union control scheme of feedforward-feedback
3 数值仿真
如图1 所示的二连杆机械臂,忽略重力影响,并假设基座的位置和姿态都是固定不变的。初始时刻以及结束时刻,关节的速度以及加速度均为0,关节角度分别为Θ0=[0° 0°]T,Θtf=[5° 10°]T.
臂杆均为空心圆柱,长度均为L =3.5 m,内径r=6 cm,外径R=8 cm;材料均为碳纤维材料,密度ρ=2.0 ×103kg/m3,弹性模量E =80 GPa,泊松比ν=0.3;关节刚度系数均为K=1.2 ×105N·m/(°);关节阻尼影响较小,暂不考虑;规划时间tf分别取3 s、4 s、6 s 以及9 s 四种情况,仿真时间均设置为T=12 s.

图6 末端点的X 方向位移Fig.6 Displacement in X-direction of endpoint
图6、图7 分别为3 s、4 s、6 s 以及9 s 四种规划时间情况下,机械臂末端点的X 方向位移、Y 方向位移。由图可以看出,末端点能在规划时间内,运动至指定的目标位置,说明该控制策略能很好地实现轨迹跟踪控制。但是由于关节柔性以及臂杆柔性的客观存在,末端点在运动过程中产生振动现象,运动至目标位置后,残余振动将持续。
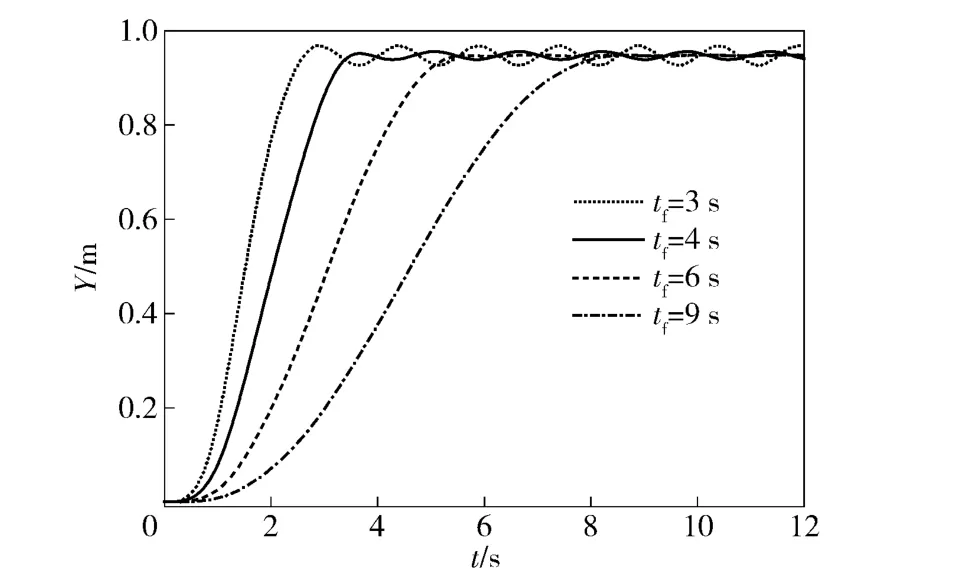
图7 末端点的Y 方向位移Fig.7 Displacement in Y-direction of endpoint
图8为末端点的振动幅值δ,图9、图10 分别为振动幅值在X 方向、Y 方向的分量δX、δY. 由图可以看出,规划时间tf=3 s 的情况下,末端点运动至指定的目标位置,但是,运动过程中出现较大的振动,并且运动结束后仍有较大的残余振动。这是由于规划时间较短,而规划时间又是前馈输入的重要因素,一旦引起振动,比较难以消除。随着规划时间的增加,运动过程以及运动结束后,振动的幅值越来越小,而且频率也越来越低。当规划时间tf=9 s 时,末端点的振动相比于规划时间tf=3 s 有了非常明显的减弱,振动幅值由20.4 mm 减弱至2.7 mm,而振动频率也有明显的降低。这说明规划时间作为前馈输入的一项重要因素,在工程实际允许的条件下,选择合适规划时间,能有效地抑制住机械臂的振动。
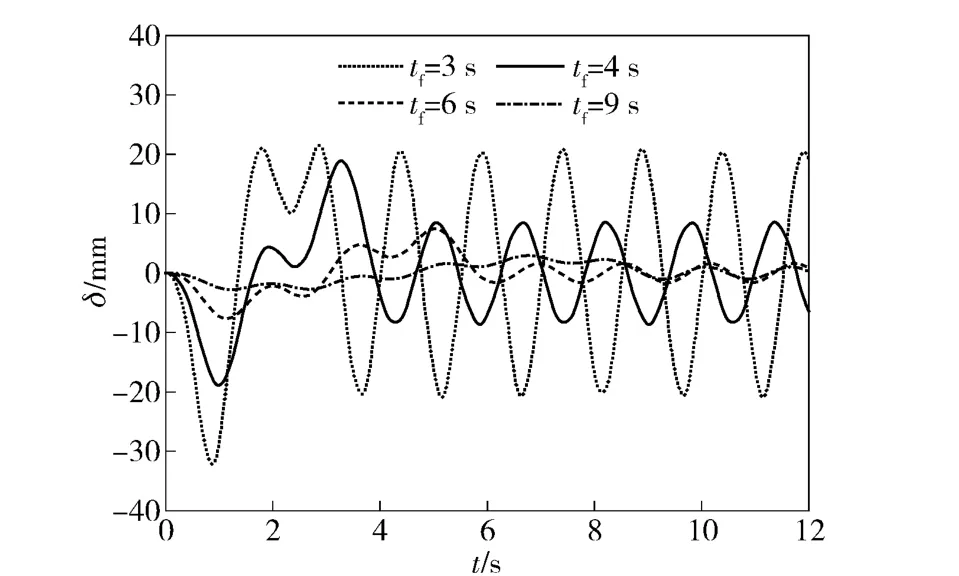
图8 末端点的振动幅值Fig.8 Amplitude of vibration at endpoint
4 结论
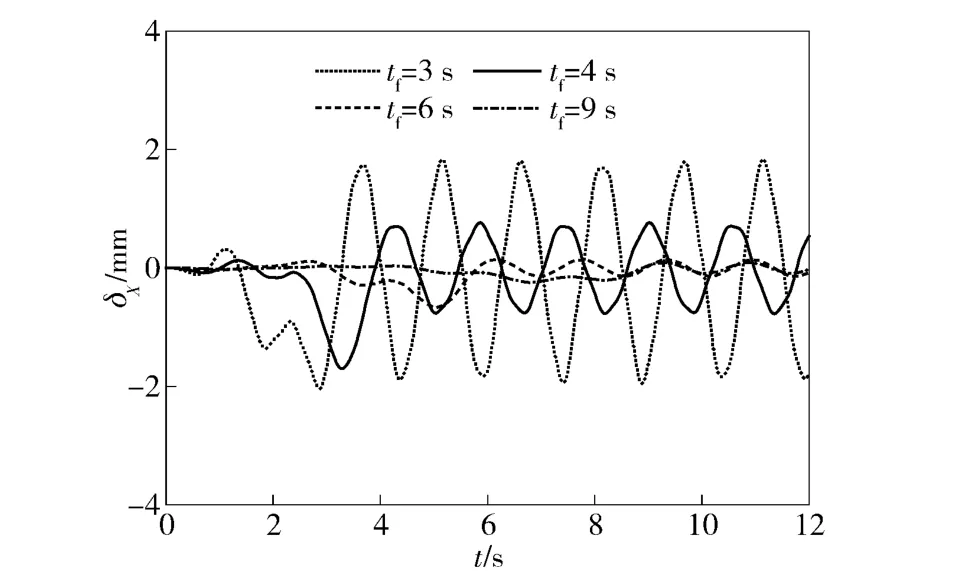
图9 末端点的X 方向振动分量Fig.9 Vibration in X-direction of endpoint
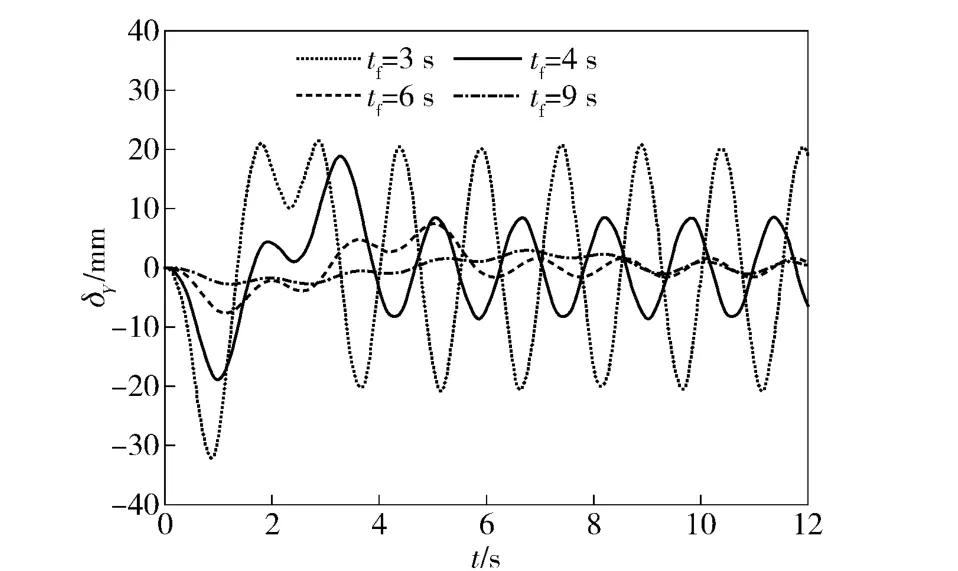
图10 末端点的Y 方向振动分量Fig.10 Vibration in Y-direction of endpoint
本文采用自然坐标法对柔性关节进行动力学建模,采用绝对节点坐标法对柔性臂杆进行动力学建模,最终得到了双柔性机械臂的动力学方程,为指标3 的微分代数方程组。既考虑了关节柔性,又考虑了臂杆的柔性,动力学模型更精确;相比于仅适用于臂杆小变形的假设模态法,该方法不仅适用于小变形问题,也能精确描述大变形问题。采用5 次多项式对关节轨迹进行规划,并通过逆动力学得到关节驱动力矩,将其作为前馈输入;采用PID 控制策略作为反馈输入,这就形成了前馈-反馈联合控制策略。在二连杆双柔性机械臂上进行数值仿真,仿真结果表明:该前馈-反馈控制策略能很好地实现轨迹跟踪控制;轨迹规划时间作为前馈输入的一项重要因素,对机械臂的振动影响较大,选择适当的规划时间,能显著地减弱机械臂的振动。
References)
[1]于登云,潘博,孙京. 空间机械臂关节动力学建模与分析的研究进展[J]. 航天器工程,2010,19(2):1 -10.YU Deng-yun,PAN Bo,SUN Jing. A literature review on dynamic modeling and analysis of the joints in space manipulator[J].Spacecraft Engineering,2010,19(2):1 -10. (in Chinese)
[2]Spong M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems,Measurement and Control,1987,109(1):310 -319.
[3]Bahrami M,Rahi A. Tip dynamic response of elastic joint manipulators subjected to a stochastic base excitation[J]. JSME International Journal:Series C,2003,46(4):1502 -1508.
[4]戈新生,崔玮,赵秋玲. 刚柔性耦合机械臂轨迹跟踪与振动抑制[J]. 工程力学,2005,22(6):188 -191.GE Xin-sheng,CUI Wei,ZHAO Qiu-ling. Trajectory tracking control and vibration suppression of rigid flexible manipulators[J].Engineering Mechanics,2005,22(6):188 -191. (in Chinese)
[5]梁捷,陈力. 柔性空间机械臂末端运动及柔性振动的模糊自适应补偿控制[J]. 兵工学报,2011,32(1):45 -57.LIANG Jie,CHEN Li. Fuzzy logic adaptive compensation control of end-effect motion and flexible vibration for space-based flexible manipulator[J]. Acta Armamentarii,2011,32(1):45 -57. (in Chinese)
[6]Shabana A A. An absolute nodal coordinates formulation for the large rotation and deformation analysis of flexible bodies,No.MBS96-1-UIC[R]. US:University of Illinois at Chicago,1996.
[7]García De Jalón J,Bayo E. Kinematic and dynamic simulation of multibody systems:the real-time challenge[M]. New York:Springer,1994.
[8]García-Vallejo D,Escalona J L,Mayo J,et al. Describing rigidflexible multibody system using absolute coordinates[J]. Nonlinear Dynamics,2003,34:75 -94.
[9]García-Vallejo D,Mayo J,Escalona J L,et al. Three-dimensional formulation of rigid-flexible multibody systems with flexible beam elements[J]. Multibody System Dynamics,2008,20(1):1 -28.
[10]Shabana A A,Yakoub R Y. Three dimensional absolute nodal coordinate formulation for beam elements:theory[J]. ASME Journal of Mechanical Design,2001,123:606 -613.
[11]Yakoub R Y,Shabana A A. Three dimensional absolute nodal coordinate formulation for beam elements:implementation and applications[J]. ASME Journal of Mechanical Design,2001,123:614 -621.
[12]García-Vallejo D,Mayo J,Escalona J L,et al. Efficient evaluation of the elastic forces and the Jacobian in the absolute nodal coordinate formulation[J]. Nonlinear Dynamics,2004,35:313-329.
[13]刘铖,田强,胡海岩. 基于绝对节点坐标的多柔体系统动力学高效计算方法[J]. 力学学报,2010,42(6):1197 -1205.LIU Cheng,TIAN Qiang,HU Hai-yan. Efficient computational method for dynamics of flexible multibody systems based on absolute nodal coordinate[J]. Chinese Journal of Theoretical and Applied Mechanics,2010,42(6):1197 -1205. (in Chinese)
[14]Arnold M,Brüls O. Convergence of the generalized-a scheme for constrained mechanical systems[J]. Multibody System Dynamics,2007,18:185 -202.
[15]Bottasso C L,Dopico D,Trainelli L. On the optimal scaling of index three DAEs in multibody dynamics[J]. Multibody System Dynamics,2008,19(1):3 -20.