组合型静止无功补偿装置研究
2014-02-18马明智廖颜沛
马明智,王 奔,冯 阳,张 翔,廖颜沛
(西南交通大学 电气工程学院,四川 成都610031)
0 引言
随着现代交流电力系统的规模越来越大,电力系统中的新矛盾和新问题也日益激增,这使得用户对电网运行的可靠性和电能质量的要求也越来越高;不平衡、冲击性用电设备日益增多,由此又产生功率因数低、电压波动和三相不对称等诸多电能质量问题。无功补偿装置可以起到提高负荷的功率因数、稳定系统电压和改善系统的负荷不平衡等作用[1~2]。
目前,静止无功补偿器的应用可大致分为两个方面:一是作为系统补偿,主要用来提高电力系统在大小扰动下电压稳定性。文献[3 ~4]在这方面做了研究,这种设计没有谈到负荷不平衡的问题,且未提及谐波治理方法,二是作为负荷补偿,主要用来抑制负荷变化造成的电压波动,补偿负荷所需的无功电流,改善功率因数和补偿负荷的不平衡。文献[5 ~7]分别提出对工业负荷采用TCR+FC 型补偿装置实现无功与负荷不平衡的补偿,但未提到在输电系统中的应用,且在大范围连续改变无功功率与无功性质(容性或感性)方面有限。针对10 kV 电力系统电压稳定以及配电网负荷引起的电压波动、功率因数较低和负荷不平衡等问题,本文设计出一种组合型静止无功补偿装置的多目标统一控制器,具有实现电压稳定、功率因数矫正、无功补偿与不平衡负荷补偿等诸多功能。将基于粒子群算法 (Particle Swarm Optimization,PSO)参数整定的PID 控制器与非线性度变换PID (non-liner norm transformation PID,NNTPID)相结合,实现快速过程控制,同时提高了控制系统的鲁棒性能[9~11]。
1 组合型SVC 系统的组成
图1 为组合型静止无功补偿装置(SVC)的系统原理框图。由图1 可以看出,此装置由晶闸管控制电抗器 (Thyristor Controlled Reactor,TCR),n (n 为TSC 组数,n =2)组晶闸管投切电容器(Thyristor Switched Capacitor,TSC)、固定电容器组(Fixed Capacitor,FC)等组成。其中,固定电容器组FC 用来滤除谐波与补偿感性无功(在基波下其成容性)。

图1 SVC 系统原理框图
对于所采集的含有谐波的电压和电流信号,采用基于滑动窗口傅里叶变换的检测方法。设输入信号f(t)可用傅里叶级数表示为:

式中:傅里叶系数为:

将计算坐标建立在内部正弦基上,使内部正弦基的2π 相位始终对应当前时刻t =t0,建立一个t=t0-T 为原点的运动坐标系,由于该坐标系是沿时间轴滑动的,由此可得傅里叶系数为:
相对滑动坐标系的基波信号表达式为:

式中:t0为相对于坐标系t 的观察时刻;τ 为滑动坐标系的自变量;T0为滑动坐标系中基函数式(3)的周期,ω0=2π/T0为基函数的角频率。
2 SVC 控制模型
TCR 的单相电路采用反并联晶闸管与串联电抗器的结构。三相TCR 多采用三角形接线方式,使得3k 次电流谐波只会在三角形中环流,而不会出现在系统线电流中。利用晶闸管的相位控制来改变电抗器的电流大小,从而改变电抗器在基波下的电抗值,与TSC 和FC 配合以达到调节无功功率的目的。
文献[1]给出了TCR 的数学模型,其基波下电流分量的幅值为:

式中:Um为相电压有效值;α 为晶闸管触发角;XL为基波电抗(Ω)。
由图1 的SVC 接线方式,可得出该组合型SVC 总导纳为:

式中:BTCR为晶闸管控制电抗器导纳值;BTSC为晶闸管投切电容器导纳值;BFC为固定电容器组导纳值。
3 组合型SVC 控制策略
图2 为组合型静止无功补偿装置控制结构图。图中,信号检测模块用于计算功率因数、无功功率以及电压有效值。cosφref,Qref,Uref为设定的参考值,cosφ,Q,U 为系统实际值。信号处理模块计算出的cosφ,Q,U 分别与cosφref,Qref,Uref作差,再通过非线性变换PID 调节器输出所需SVC补偿导纳值。NNTPID 调节器是在PID 调节器之前串联非线性变换环节构成的非线性PID 控制器。文献[7]给出了非线性变换函数确定方法。与常规的PID 控制器比较,其响应速度与稳定性都得到了很好地改善。

图2 静止无功补偿装置控制结构图
采用PSO 算法来设计控制器参数kP,kI,kD。该算法中粒子的速度和位置的更新公式如下:
式中:X 为粒子当前位置;V 为粒子速度;rand()产生(0,1)之间的随机数;w 为惯性权重系数;Pid为个体极值;Pgd为全局极值;c1,c2代表将每个粒子推向Pid和Pgd位置的权重。取粒子的当前位置为PID 控制器的参数。粒子大小为3 维。
对于PID 控制器,控制参数优化的目的在于使控制的偏差趋于零,有较小的超调量和较快的响应速度。将超调量作为最优指标的一项,本文采用的适应度函数为:
式中:ey(t)为误差值,ey(t)= y(t)- y(t -1);y(t)为被控对象输出,此项为惩罚项;δ 为超调量;w1,w2,w3为权值,且有w3≫w1。
负序补偿模块运用负序补偿理论计算出负序补偿所需导纳值。智能开关控制器可以选择SVC的工作模式与负荷平衡或不平衡补偿模式。计算出的SVC 所需补偿导纳值BSVC减去固定电容器导纳值BFC,再通过TCR 与TSC 投切导纳计算模块得到BTCR与BTSC。由BTCR通过非线性化环节得到TCR触发角;由BTSC通过TSC 投切逻辑模块得到TSC 投切组数与投切时刻,然后通过触发电路,形成触发脉冲触发SVC 各晶闸管。
3.1 SVC 对电网电压稳定性研究
静止补偿装置的基本功能之一是控制与输电系统连接点的电压。理想的静止无功补偿器的端部要按一条固定的伏安特性曲线发出或吸收无功功率。实际使用的U -I 曲线如图3 所示,曲线电流方向有上升的斜率。加入斜率后的SVC 特性曲线,可以降低SVC 无功额定值,防止SVC 频繁到达功率边界值,同时也改善了并联运行的补偿装置之间电流分配。

图3 SVC 特性曲线
按照设备的连续运行定额,斜率按照惯例可在0 ~10% 范围内调节。通常大部分调节范围为2% ~5%。晶闸管控制的补偿器可以通过它的控制系统来改变斜率。在既不吸收也不发出无功时的静止补偿装置的电压为图中所示参考电压Uref。
3.2 SVC 无功补偿与功率因数矫正
工业用电负荷(如大功率的轧钢机、电焊机、电弧炉等)中,很多都是对电能质量产生重要影响的冲击性负荷。SVC 作为负荷无功补偿,主要用来抑制冲击性负荷变化造成的电压波动,补偿负荷所需的无功功率,改善功率因数。随着负荷运行工况的不同,作负荷补偿的SVC 有时也要以维持电压恒定为目标。
为保持负荷端节点电压保持不变,必须通过静止补偿器的调节,使得系统输入的无功功率QS保持恒定,各无功功率间的关系为:

式中:QS为系统提供的无功功率;QSVC为补偿器输出无功功率;QL为负荷所需无功功率。
根据负载无功的变化情况,可以调节QSVC的值,使得(8)式中总的感性无功和容性无功相抵消,实现电网提供的无功功率为常数(或0),功率因数接近1,电压几乎不波动。
3.3 负序补偿措施
本文设计的控制策略将补偿器的功能分为两部分:一部分采用前馈方法计算出所需补偿的负序导纳值,对产生的负序加以抵消;另一部分采用反馈的方法提供正序电压下所需的无功功率、矫正功率因数或稳定母线电压等。
设图1 中的PCC 点的电压无畸变且是对称的,系统相电压为:

线电流的对称分量为:

要求补偿器能够完全补偿三相不平衡和无功功率,就需要补偿负荷电流的负序分量与无功功率,从而实现负荷无功与不平衡补偿,所以有:

由式(11),(12)推出:
其中,负序分量所需补偿的导纳为:

下面运用瞬时无功理论推导所需补偿器负序补偿导纳。
设三相平衡母线电压为:

负荷的三相不平衡电流用正序分量瞬时值与负序分量瞬时值可以表示为:

图4 为采用瞬时无功理论的序电流d,q 分量检测图。首先采集三相电流ia,b,c进行clark 变换与park 变换,PLL 为电压锁相环用以锁定电压相位,其中,clark变换矩阵为Cabc/αβ=和Cabc/α'β'=,park 变换矩阵为Cαβ/dq=Cα'β'/dq=。然后通过低通滤波器LPF 滤除交流分量,从而提取出d,q 坐标系下的直流量。设分离出来的正序电压分量、正序电流分量以及负序电流分量在d,q 坐标系下对应的直流量分别为udp,uqp,idp,iqp,idn,iqn。

图4 序电流d,q 分量检测
由此可得:
式中:ip1,in1分别为d,q 坐标系下,基波分量的电流合成矢量;φp1,φn1分别为合成矢量与d 轴夹角。
定义两个没有物理意义的符号:

结合式(12),最终推导出负序补偿导纳为:

式中:up为电压合成矢量。式(20)即为所需补偿的负序导纳值。
4 仿真验证
本文采用Matlab/Simulink 软件,对组合静止无功补偿器加以仿真验证。
采用PSO 算法整定PID 控制器参数时,设定粒子群数N=50,粒子大小D =3,最大迭代次数为60 次。以调压为例,图5 为适应度函数J 的收敛曲线。PSO 优化的PID 控制器参数最优解为:kP=2.540 1,kI=344.974 8,kD=7.025 3。

图5 适应度函数收敛曲线
4.1 电力系统调压仿真
设线路额定电压为10 kV,频率为50 Hz,线路空载时,过压可达1.2 p. u. ;而线路重载时,电压降低到0.8 p. u. 左右。设置SVC 的TCR 容量为-15 MVar (假设输出感性无功功率为负),固定电容器组FC 容量为5 MVar,TSC1 与TSC2容量分别为5 MVar,所以SVC 输出总无功功率为15 ~-10 MVar。图6 给出了无斜率、及斜率分别为3%与5%时,SVC 的V -I 特性曲线,其中*表示SVC 运行时的某些运行点。

图6 SVC 的V-I 特性曲线
将斜率droop 设置为0,基准电压Uref设置为1 p. u. 。将各物理量化为标幺值,取定基准电压UB=10.5 kV,基准容量SB=1 MVA。图7 为未投入SVC 与投入SVC1 时母线处电压比较。
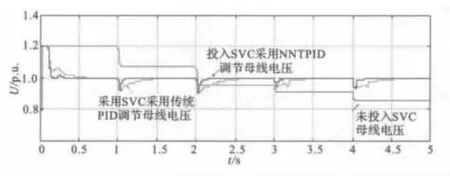
图7 稳定母线电压仿真
由图7 可见,没有SVC 时,母线电压在空载时可达1.2 p. u. ,随着在1 s,2 s,3 s 及4 s 时负荷不断投入,感性负荷使电压下降到0.84 p. u.左右。若在0.1 s 时投入SVC,使得电压维持在给定值1 p. u. ;4 s 后,TCR 短路,失去调节作用,完全靠TSC 和FC 发出感性无功功率以稳定电压。由图7 也可以看出,与传统的PID 调节器比较,应用PSO 算法整定的NNTPID 参数,大大降低了调节时间,抑制过大超调量,提高了稳定度。
4.2 调节功率因数或无功补偿仿真
由于TCR 的投入会产生大量谐波,本文采用窗口滑动的傅里叶变换,每个基函数周期中采集128 个离散点以提取基波信号。图8 可见,窗口滑动的傅里叶变换提取基波信号效果良好。
设定无功补偿参考值Qref。图9 是负荷无功补偿时电网侧相电压与相电流波形,对比(a)与(b)电压与电流的相位关系可以看出,SVC 的接入实现了负荷侧无功功率补偿,补偿后功率因数为1。
设定功率因数参考值将功率因数补偿到0.98。图10 是以功率因数补偿为目标的仿真波形。由图10 可以看出,补偿前功率因数在0.75左右,接入SVC,使功率因数稳定在0.98。
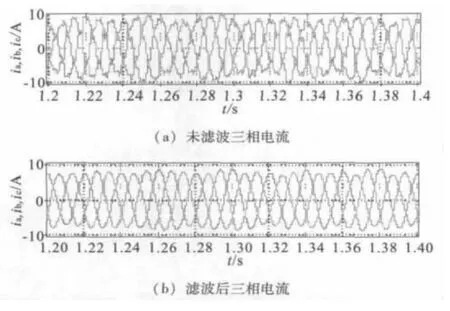
图8 窗口移动傅里叶变换提取基波信号
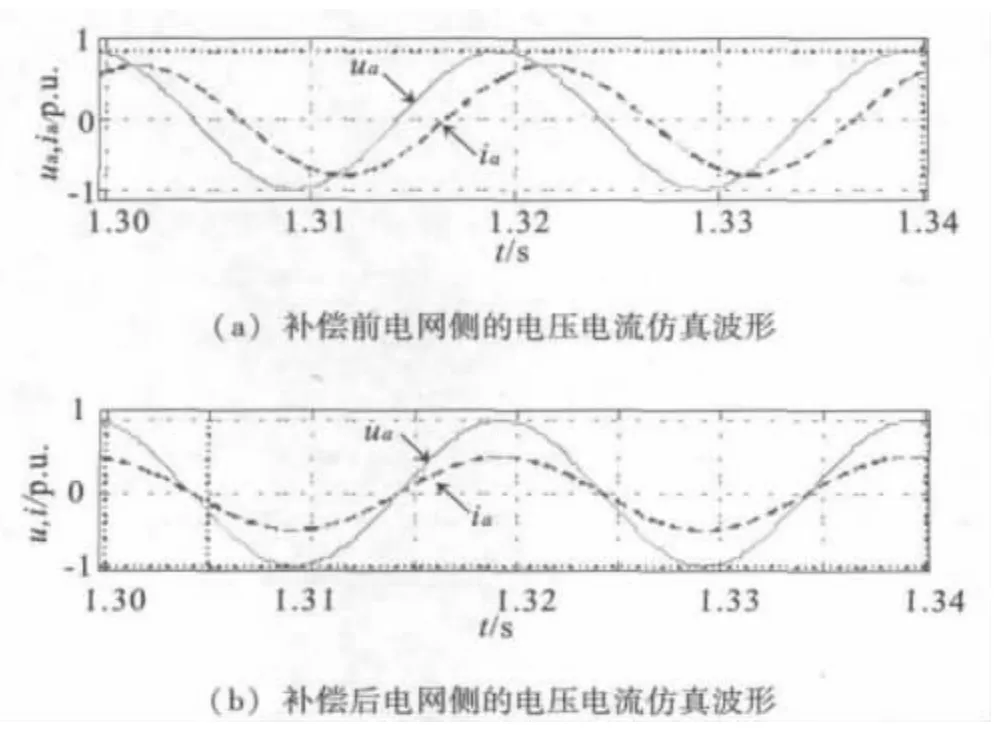
图9 无功补偿仿真波形
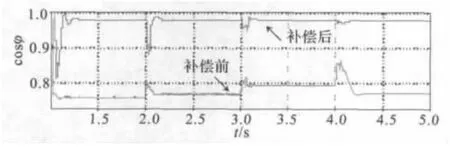
图10 功率因数校正仿真波形
4.3 负序补偿仿真
图11 为在不平衡负荷条件下采用前馈补偿策略对负序分量进行补偿结果。未加补偿时母线处三相电流含有负序分量,投入SVC 加以补偿后,母线处的三相电流负序分量明显减少,负序分量只会在SVC 与负荷间流通,而不会进入电网。

图11 负序补偿仿真波形
5 结论
仿真验证说明,SVC 是无级、全面的调节系统,不但可以连续调节电压,功率因数,还能实现负序电流补偿。只要SVC 参数与负荷及电网的无功功率配合选择适当,轻载和空载时,退出TSC,只调节TCR,便可降低因为电缆或架空线路电容引起的电压升高;重负荷时,调节TCR 短路,通过TSC 和FC,提升因为感性负荷引起的电压降落。所以,SVC 可连续地实现电力系统配电网电压稳定。同时,SVC 可以连续调节功率因数,降低线损和减小负荷端电压波动。采用分相方法补偿负荷引起的三相不平衡,提高了电能质量。本文所采用的控制策略简单,易于实现,对实际工程有指导意义。
[1]马绍尔R M.静止无功补偿装置[M].肖立军译.长沙:湖南大学出版社,1989.
[2]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2002.
[3]周晓华,王荔芳,蓝会立,等.基于改进型非线性度变换PI 的SVC 电压控制[J].科学技术与工程,2012,15 (2):34-38,44.
[4]陈新亮,张大庆.基于PI 控制方法的SVC 电压负反馈控制策略[J].科学技术与工程,2012,12 (29):7736-7740.
[5]徐振宁.10 kV 静止无功补偿装置的研究[D].山东:山东科技大学,2011.
[6]翟莎.平衡不对称负荷的静止无功补偿器的研究[D].西安:西安理工大学,2008.
[7]苏玉鑫,段宝岩.一种新型非线性PID 控制器[J].控制与决策,2003,18 (1):126-128.
[8]Steinmetz C P.Power control and stability of electric generating station [J].AIEE Transaction,1920,XXXIX(II):1215-1287.
[9]车学哲,沈凤龙,王建辉,等.基于瞬时对称分量法的电网无功补偿方法[J].电力系统及其自动化学报,2012,24 (2):107-112.
[10]方璐,罗安,徐先勇,等.静止无功补偿器多目标统一控制方法[J].中国电机工程学报,2010,30(19):106-113.
[11]魏星,崔鹏程.粒子群优化算法及其在电力系统中的应用[J].电力科学与工程,2005,18 (10):21-24,30.
