基于MATLAB的电子节气门控制器的建模与仿真*
2014-02-14李岳林廖伯荣谢安平周喆吴勇刘宝杰
李岳 林廖 伯荣 谢安平 周喆 吴勇 刘宝杰
(长沙理工大学汽车与机械工程学院湖南长沙410076)
基于MATLAB的电子节气门控制器的建模与仿真*
李岳 林廖 伯荣 谢安平 周喆 吴勇 刘宝杰
(长沙理工大学汽车与机械工程学院湖南长沙410076)
根据数学模型在Matlab/Simulink中建立了电子节气门控制器的仿真模型,分别采用普通PID和模糊PID两种控制策略实现了对节气门的控制仿真,并对仿真结果进行了比较分析。结果显示模糊PID控制具有超调量小、瞬态响应速度快、性能稳定等优点,并验证了该模型的可行性。
节气门控制器模糊PID步进电机仿真
引言
节气门是汽车发动机一个十分重要的控制部件,随着汽车电子技术的发展,传统机械式节气门逐渐被电子节气门所取代[1]。电子节气门广泛应用于现代汽车上,其优点在于可根据驾驶员的意愿、油耗、排放需求,能够快速精准控制节气门的最佳开度[2],实现发动机最优空燃比控制,发挥发动机最佳性能,提高车辆动力性和经济性,改善驾驶安全性和舒适性[3]。电子节气门具有复杂、非线性、时变性等特点,实际中的电子节气门控制还未达到较优效果[4]。国内在电子节气门方面的研究起步较晚,发展较慢,国内大多数生产的汽车采用国外的电子节气门控制系统,因此对节气门控制器的研究十分必要。
1 电子节气门控制器模型的建立
电子节气门控制器由三相异步电机模块、电机的坐标变换模块、PWM发生器模块、逆变器模块、节气门本体模块、控制器模块等组成。Simulink库中没有步进电机模型,采用基于d-q轴的电压方程和运动方程,搭建数学模型[5],步进电机模型是建立在三相旋转坐标系上的[6],所以逆变器模块出来的三相定子电流必须经过CLARK变换与PARK变换转换成转子d-q轴上的电流。电流环采用普通PID和模糊PID控制方式,d-q轴上的经过CLARK逆变换和PARK逆变换转换到三相静止坐标系下,输出的三相电流信号波形与锯齿载波在PWM模块里进行比较,生成六路脉冲信号,输出给逆变器。利用脉宽调制技术(PWM),将要调制的模拟信号波形与载波相比较,得到控制器所需要输出的一系列脉冲控制信号。逆变器调节各相绕组的通电顺序,实现步进电机的三相六拍、三相三拍等基本控制方式,节气门控制器的仿真模型如图1所示。

图1 节气门控制器仿真模型
1.1 三相混合式步进电机驱动
三相混合式步进电机由三组对称的定子绕组构成,依据基尔霍夫电压定律可知,各相电压方程可以表示为:
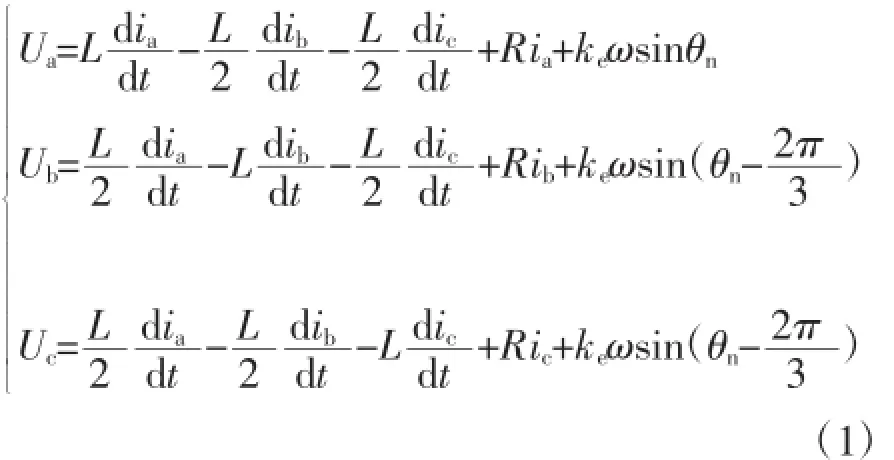
其中:U为加载绕组两端的电压;θn为电角度;ω为角速度;R为等效电阻;L为等效电感;ke为反电动势系数。
由步进电机的运动方程,可知:

其中:Te为电磁力矩;B为粘滞摩擦系数;TL为负载转矩;J为转动惯量。
角速度ω与转角θ的关系:

1.2 节气门弹簧复位力矩
节气门预留10%左右的初始位置,是为了确保当节气门供电出现故障后,发动机还能继续工作。节气门角度偏离初始位置时,都受到复位弹簧的反作用力[7]。

其中:Ks为弹簧的扭转刚度;θ1为节气门转角;θ0为节气门处于初始位置时的转角;Ts0为节气门处于初始位置时弹簧的预紧扭矩。
1.3 节气门摩擦阻力矩
克服了库伦摩擦阻力矩后节气门才能转动,且节气门在转动过程中还要克服粘滞摩擦阻力矩,总摩擦阻力矩为:

其中:μd为粘滞摩擦系数;Tf0为库伦摩擦力矩。
1.4 节气门运动学模型
依据动力学原理知节气门系统的动力学方程为:
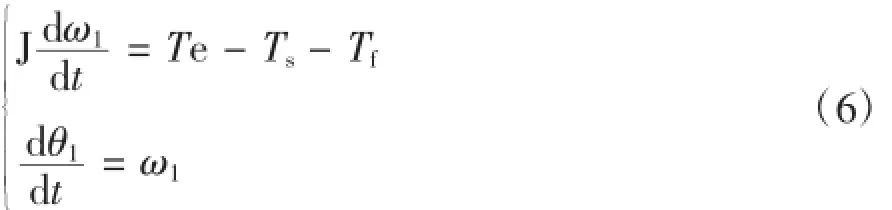
其中:J为节气门轴上的总转动惯量;ω1为节气门角速度。
2 电子节气门普通PID控制策略
2.1PID控制原理
PID控制器的结构框图如图2所示。系统由模拟PID控制器和被控对象组成。

图2PID控制器结构框图
控制器的输出和输入之间的关系可描述为:

式中:Kp、Ki、Kd分别为比例系数、积分系数和微分系数。
2.2PID控制器参数对控制系统性能的影响
1)比例系数Kp
利于缩短系统的响应时间,提高系统控制精度。若Kp值变大,系统的响应速度提高,系统稳态误差降低,控制精度上升。但Kp值太大,控制系统响应过程将产生超调,并产生振荡,使系统稳定性降低。Kp值太小,调节精度下降,响应速度迟缓,系统静态、动态性能变差。
2)积分系数Ki
其作用在于降低系统的稳态误差。若Ki值越大,积分能力越强,系统静态误差削弱越快。但Ki值太大,控制系统将产生超调,增多振荡次数,会降低系统的稳定性能。
3)微分系数Kd
用于改善系统的动态特性,如降低超调量,减少调节时间,使稳态误差降低,提高控制精度。Kd越大,微分作用越强,反之则越弱。但Kd值过大或过小,系统将增加超调量和调节时间。
2.3PID参数的调定
本文中的电子节气门控制器的执行机构是步进电机,根据节气门开度的期望值r(t)和实际值y(t)进行比较,构成控制偏差e(t)=r(t)-y(t),e(t)、u(t)值分别作为PID输入量和输出量,同时,u(t)作为被控对象的输入量,从而驱动步进电机。根据临界比例度法,首先在MATLAB中Command Window输入:Ki=0;Kd=0;然后输入任意值Kp,且不断调整其大小。若系统输出波形增幅振荡时,减少Kp值;若系统输出波形减幅振荡时,增加Kp值,直至出现等幅振荡曲线。此时可以得到适当的Kp值,即临界增益值Ku。从等幅振荡曲线可以读出曲线两峰值之间的距离T,即为临界振荡周期Tu。最后,根据表1公式可得Kp,Ki,Kd的值。根据控制效果不断调节PID控制参数,直至最佳控制效果,本文Kp,Ki,Kd的值分别为0.8,7.5,0.2。

表1 临界比例度法PID参数整定公式
3 电子节气门模糊PID控制策略
模糊PID控制器是利用模糊控制实时调整PID控制器的三个参数Kp、Ki、Kd的值,使被控对象具有良好的静、动态性能。依据节气门试验的观察结果,将定义节气门的位置误差E和误差变化率Ec的变化区间分别为[-0.1,0.1]和[-0.05,0.05];控制量U的变化区间为[-1,1];设节气门的位置误差E、误差变化率Ec及控制量所取得模糊子集的论域都为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6];量化因子Ke=60,Kec=120,Ku=1/6;ΔKp、ΔKi、ΔKd模糊规则如表2所示。此模块的输入为参考转速与实际转速差,输出为参考电流,如图3所示。
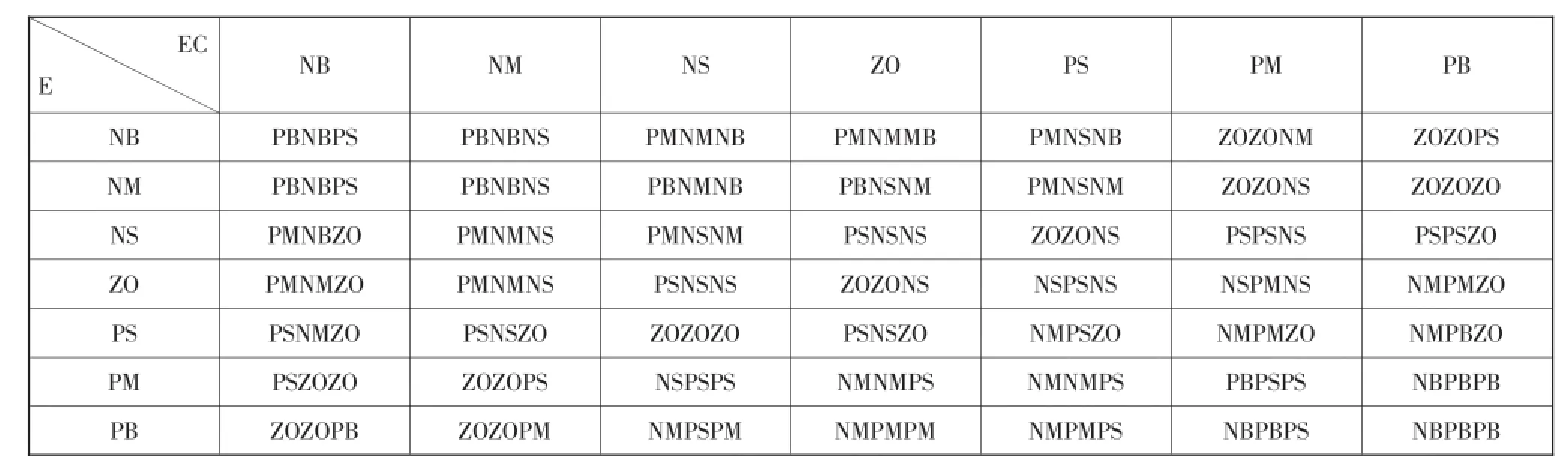
表2 ΔKp、ΔKi、ΔKd的模糊控制规则

图3 模糊PID控制模块
4 仿真结果分析
4.1 节气门由小开度向大开度阶跃
节气门从小开度向大开度变化时,节气门开度变化范围为9%~88%,如图4所示。当节气门开度由10%阶跃到90%时,PID与模糊PID两种控制方式的上升时间几乎相同,约为0.12s,模糊PID控制方式超调量很小,为1%;而普通PID超调量很大,为4.5%。这是因为采用模糊PID控制方式时,积分作用随着系统偏差的变化成反方向变化,即:偏差减少时,积分作用加强;偏差增大时,积分作用减弱,便能保证系统超调量限制在一定范围内。
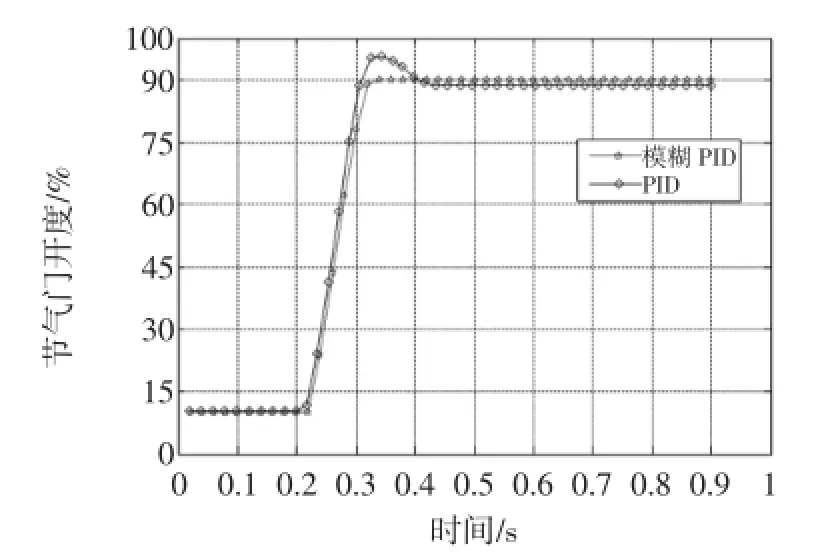
图4 节气门开度由10%到90%的阶跃响应曲线
节气门开度由10%到45%的阶跃响应曲线如图5所示。当节气门开度由10%阶跃到45%,采用模糊PID控制方式时,上升时间为0.09s,而普通的PID控制方式上升时间稍短,为0.06s。这是因为普通PID控制方式能把较大的偏差计入积分项,积分能力加强,从而缩短了上升时间,但引起了较大的超调量。普通PID超调量为14%,而模糊PID控制基本没有超调,且系统很快达到稳定状态。

图5 节气门开度由10%到45%的阶跃响应曲线
节气门开度由45%到90%的阶跃响应曲线如图6所示。节气门开度开始由10%阶跃到45%,当系统达到稳定状态时,节气门开度又从45%阶跃到90%。模糊PID控制方式的超调量、稳定时间等都低于普通的PID控制方式。

图6 节气门开度由45%到90%的阶跃响应曲线
4.2 节气门由大开度向小开度阶落
如图7所示,首先节气门开度由10%阶跃到90%。当系统达到稳定后,节气门开度又从90%阶落到15%。若采用模糊PID控制方式,节气门开度急剧下降,历经0.09s可到最小开度;而普通PID控制需要0.25s才能接近最小开度,并且这两种控制方式都有很大的超调量。由于模糊PID控制采用可逆PWM驱动方式,当节气门开度减小时,控制量急剧下降。当控制量小于0时,改变步进电机的电流方向,电机反转,电机驱动扭矩与复位弹簧的复位方向相同,从而能迅速减小节气门的开度。节气门开度增加和减小时受力情况不一样,控制量也相异,因而超调量的大小还取决于节气门开度是增加还是减小,前者超调量小于后者。

图7 节气门开度由90%到15%的阶落响应曲线
普通PID控制方式,由于步进电机的磁滞,不能快速转变扭矩方向。当节气门开度突然下降时,控制量减小,复位弹簧需克服电机正向扭矩,因此滞后时间延长。
图8为节气门开度由90%到45%的阶落响应曲线。图9为节气门开度由45%到15%的阶落响应曲线。普通PID控制方式比模糊PID控制方式的滞后时间长,原因同上所述。
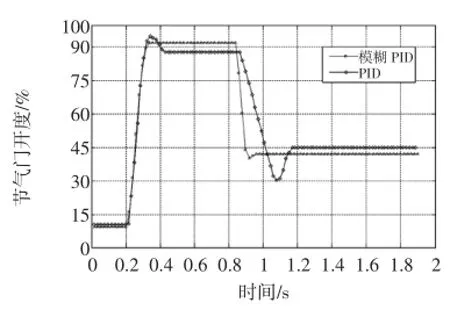
图8 节气门开度由90%到45%的阶落响应曲线

图9 节气门开度由45%到15%的阶落响应曲线
5 结论
本文针对节气门系统在Simulink中建立了节气门控制器仿真模型,分别采用普通PID和模糊PID两种控制策略进行阶跃响应仿真。从仿真结果可以得出,模糊PID相对普通PID控制具有较小的超调量和调节时间,瞬态误差较小,滞后时间短,响应速度快。由于模糊PID控制算法考虑了节气门系统的动态特性,可以不依赖系统的准确的数学模型。同时也充分显示了Matlab/Simulink直观、方便的特点。
1郭孔辉,付皓,丁海涛.汽车电子节气门控制器开发[J].科学技术与工程,2008,8(1):446~450
2张金柱,张毅,韩玉敏.汽车电子节气门控制器仿真设计[J].黑龙江工程学院学报(自然科学版),2006,20(1):60~63
3孙亮亮.汽车发动机电子节气门控制系统建模与仿真[D].哈尔滨:哈尔滨工业大学,2008
4严浩铭,孙仁云,张晟恺,等.基于非线性优化PID的电子节气门控制系统仿真分析[J].湖北汽车工业学院学报,2013,27(2):66~69
5李自成.感应电机无速度传感器矢量控制系统的研究[D].武汉:华中科技大学,2005
6陈强.三相混合式步进电机细分驱动研究[D].武汉:华中科技大学,2007
7李儒龙,陈卫方,张凡武,等.基于Simulink的电子节气门控制策略开发[J].汽车科技,2011(6):14~17
Modeling and Simulation of Electronic Throttle Controller Based on Matlab
Li Yuelin,Liao Borong,Xie Anping,Zhou Zhe,Wu Yong,Liu Baojie
School of Automobile and Mechanical Engineering,Changsha University of Science&Technology(Changsha,Hunan,410076,China)
Simulation model of electronic throttle controller is established in the Matlab/Simulink according to the mathematical model,and both ordinary PID and fuzzy PID control strategy are respectively used to achieve the throttle control simulation.Results of the simulation are compared and analyzed,which show that the fuzzy PID control is of less overshoot,fast transient response,stable performance.The feasibility of the model is verified.
Throttle controller,Fuzzy PID,Stepper motor,Simulation
TK411+.3
A
2095-8234(2014)06-0039-05
2014-09-19)
国家自然科学基金项目(项目批准号:51176014)。
李岳林(1963—),男,教授、博士生导师,主要从事汽车节能减排与新能源技术等研究。
