全路面起重机多桥转向轨迹控制仿真实验
2014-02-08潘志毅刘启锋李选朋王惠民
潘志毅, 刘启锋, 李选朋, 王惠民, 吴 涛
(1. 大连理工大学 机械工程学院, 辽宁 大连 116024; 2. 大连理工大学(徐州)工程机械中心, 江苏 徐州 221131; 3. 大连益利亚工程机械有限公司, 辽宁 大连 116024)
0 引 言
全路面起重机是一种兼有汽车起重机和轮胎起重机性能特点的轮式起重机。它具有优越的起重性能,较强的越野能力,适应不同工作环境,结构紧凑,行驶灵活,爬坡能力好[1]。多桥转向技术是全路面起重机的关键技术之一,其优劣直接影响到车辆的通过性和机动性。转向系统的缺陷还会加剧轮胎的磨损,使车辆可操纵性差,造成经济浪费,甚至严重事故。多桥转向模式包括机械式、液压式、电控电动式、电控液动式。电控液压式转向系统结构简单,工作平稳可靠,具有较大的转向驱动力,在大型运输车辆应用广泛[2]。
为保证多桥车辆转向行驶时的稳定、准确及可操纵性,一些学者提出了多种先进的控制策略。Aga等[3]设计了一种具有一阶滞后的多桥转向系统;Yasuji[4]将最优控制应用于多桥转向系统;Yuhara,Furukawa Y提出了一种自适应转向控制的方法;国内屈求真[5]基于二自由度对转向特性进行了初步研究;李炎亮[6]提出了横摆率跟踪的多轮转向最优控制策略;张小江[7]使用无静差跟踪控制系统,跟踪理想的横摆角速度及质心侧偏角;孙玉波[8]使用模糊PID策略改善转向液压系统动态特性。以上研究集中于如何控制转向系统,使车身侧偏角为零及横摆率稳定,未涉及到多轮转向轨迹的仿真与优化。
本文给出了全路面多桥运动模型,建立了液压转向系统的数学模型,利用滑模控制方法对转向路径进行仿真和优化,得到实际路径与理想轨迹及二者间的误差曲线。
1 多桥转向模型
车辆转向时要避免产生路面对车辆行驶的附加阻力及轮胎侧移引起的磨损,要求转向过程中所有轮胎纯滚动而无滑动。为满足该要求,阿克曼定理[9]指出,在忽略轮胎侧偏角的影响下,所有车轮轴延长线应该交于一点。阿克曼定理如图1所示。
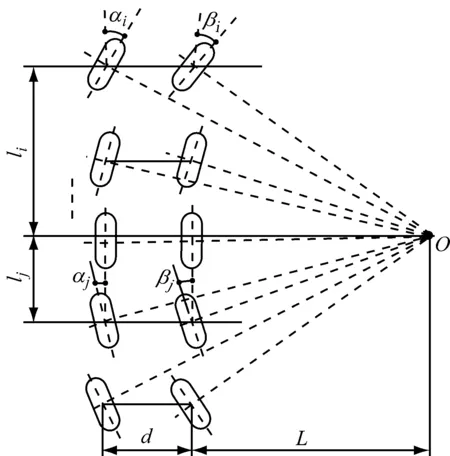
同一转向桥内、外轮转角关系:
cotαi-cotβi=K/L
(1)
不同转向桥的同侧转向轮的转角关系:
(2)
式中:αi,αj为第i、j车桥外轮转角;βi,βj为第i、j车桥内轮转角;K为同一转向轴线主销的间距;L为起重机转弯半径;li,lj为车辆转向中心到第i轴的距离。
建立了起重机多桥转向模型的笛卡尔坐标系如图2所示。将起重机简化为线性2自由度模型,即只包含车身侧向运动和车辆横摆运动两个自由度[10]。起重机质心取其坐标中点。
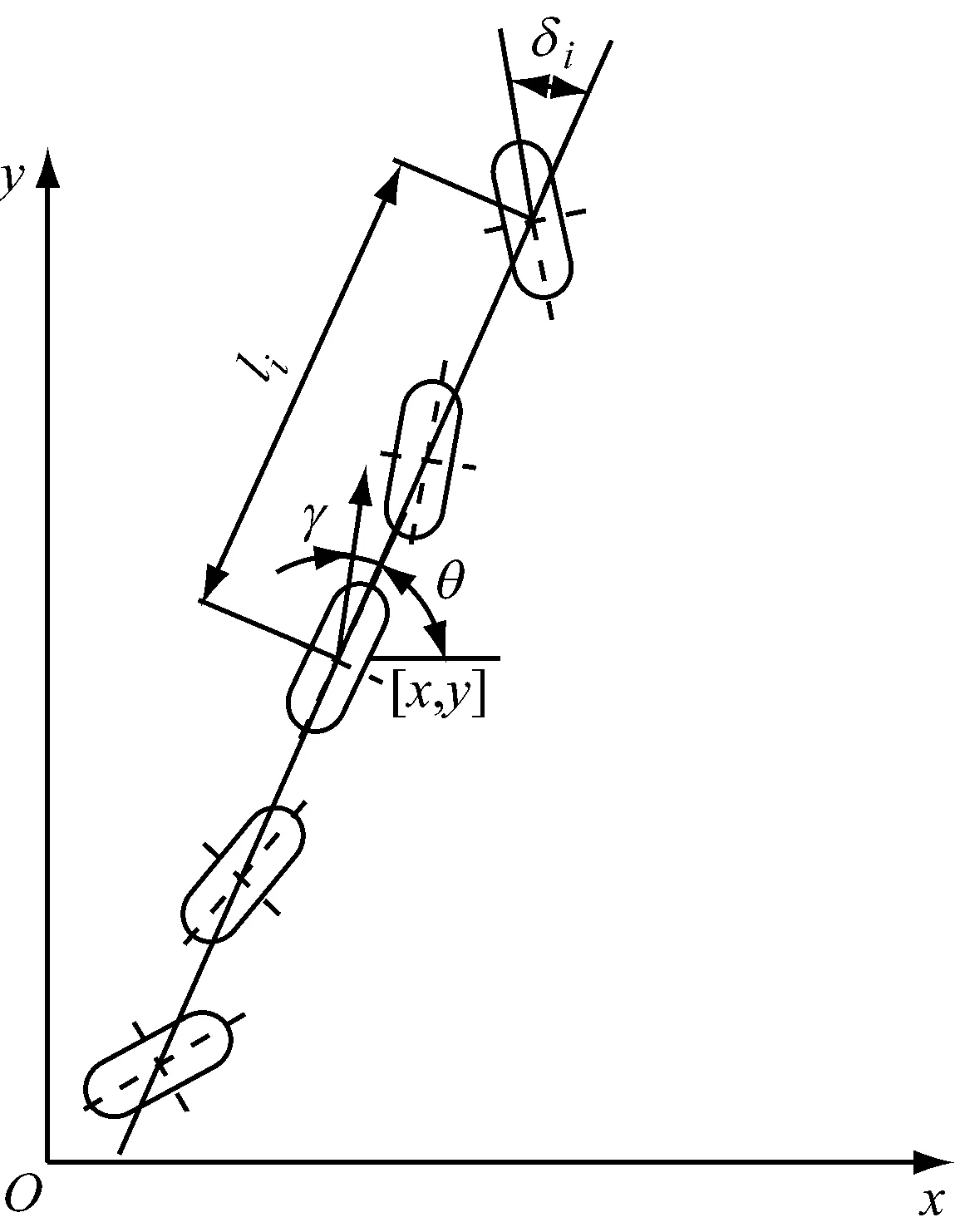
根据运动学方程及几何知识可得:
式中:x为起重机质心横坐标;y为起重机质心纵坐标;θ为起重机航向角,即车身与x轴夹角;γ为车身侧偏角,即速度方向与车身夹角;δi为第i桥车轮转角;v是起重机质心线速度。方程中存在3个输入变量:车桥转角δi和δj,速度v,三者都可直接测得[11]。输出变量为x′,y′,θ′,积分可得起重机位姿坐标x,y,θ。根据零质心偏角控制策略[12],为使β为零,保证l1tanδ5+l5tanδ1=0即可。
由于液压转向系统的滞后性及实际转向中不可预测性,起重机转向行驶时实际路径与理想轨迹存在着误差。即起重机理想位姿坐标x,y,θ和实际位姿坐标xa,ya,θa不相同。位姿误差如图3所示。
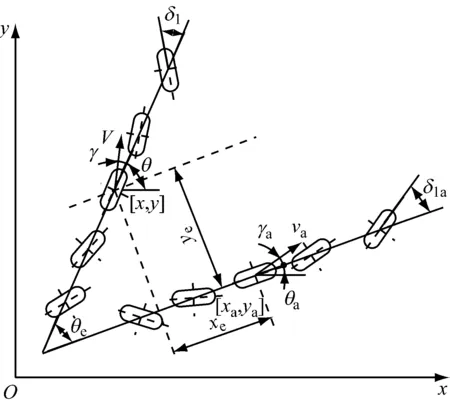
起重机位姿的误差方程为:
(5)
其中:xe为车身方向的误差;ye为车身侧方向误差;θe为车身航向的角度误差。
对式(5)求导,整理可得起重机位姿误差微分方程:
(6)
2 液压转向系统数学模型
为得到车桥的实时转角δi,即起重机模型转角输入,需要建立液压系统数学模型。全路面起重机车桥的转动多采用电控液压式。比例换向阀控制液压缸的伸缩,拉动车桥偏转。液压执行系统为阀控非对称缸液压系统。液压缸输出位移函数[13]为:
(7)
式中:ωh为液压固有频率,
ξh为液压阻尼比,
伸缩缸比例电磁阀的频宽近似于液压固有频率,比例电磁阀可以简化为二阶震荡环节[13]:
(8)
式中:Ksv为比例阀的增益;ξsv为比例阀的阻尼比。
3 滑模控制与仿真分析
(9)
本文对160t全路面起重机转向系统进行仿真实验。该起重机前2桥为机械杆系转向,后3桥为电控液压转向。在Matlab软件Simulink模块中建立全路面起重机转向路径跟踪模型。其中阶跃信号代表第1车桥转角,输入液压系统得到后3桥实时转角。转角与车速传递至转向运动方程,得到起重机转向实际路径和理论轨迹的误差。图4为起重机转向路径跟踪模型,图5为转向液压系统模型。
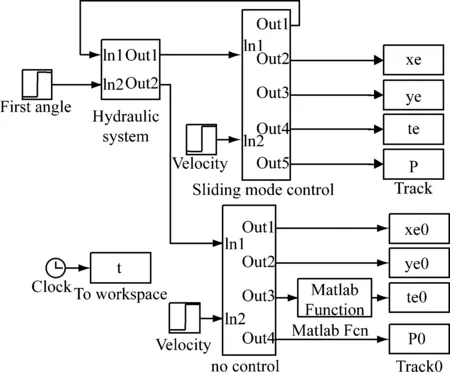
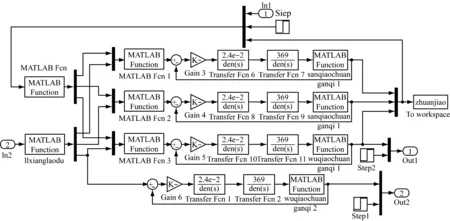
图5 转向液压系统模型
设定第一桥转向角为40.1° (第一桥最大转角),车速为3.6 km/h,仿真时间为30 s。不施加控制算法,起重机转向路径跟踪模型仿真输出如图6、7。采用滑模控制方法,仿真输出如图8、9。
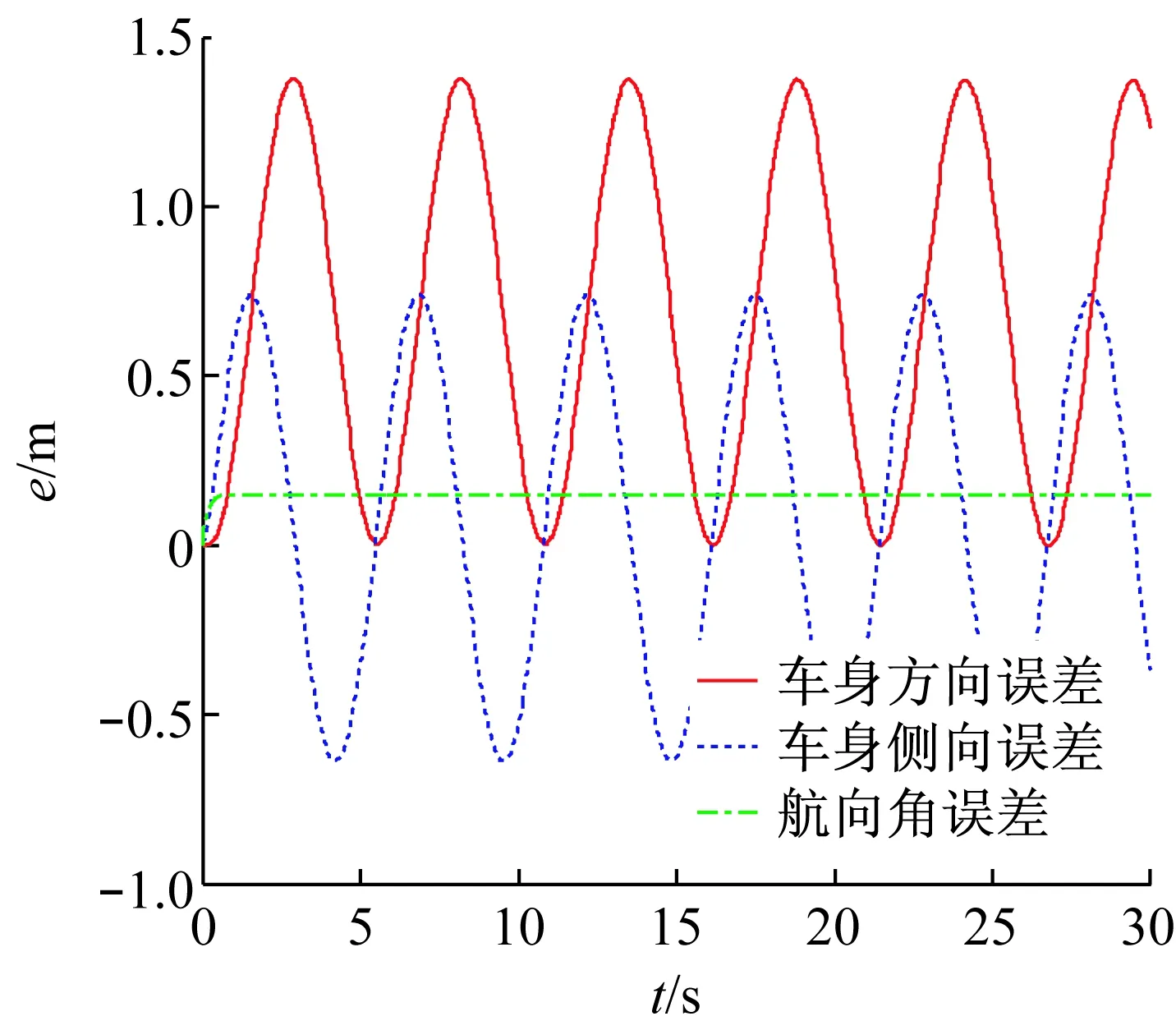
图6 起重机转向路径与理论轨迹误差(未采用滑模控制)
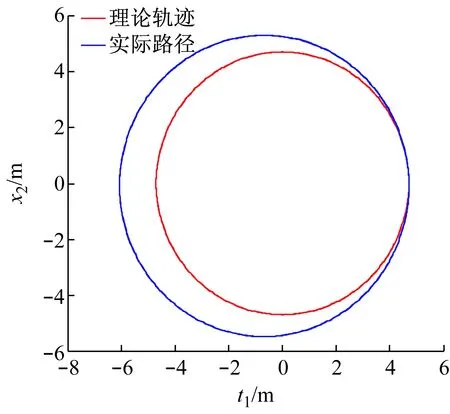
图7 起重机转向路径 (未采用滑模控制)
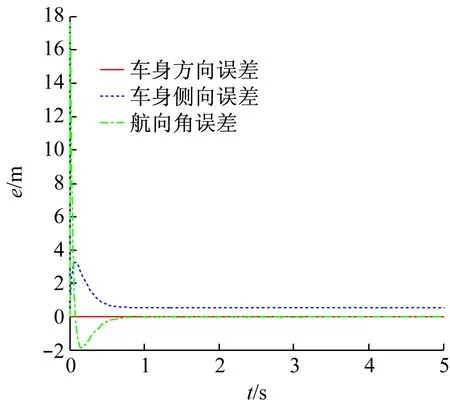
图8 起重机转向路径与理论轨迹误差(采用滑模控制)
将车速v分别设定为3.6 km/h, 10 km/h, 20 km/h,第一桥转角分别设定为40.1°, 20°, 5°,进行仿真实验。起重机转向路径跟踪模型仿真输出结果汇总见表1。
4 结 论
(1) 滑模控制方法大大地减小了全路面起重机多桥转向实际路径与理论轨迹的误差,保证了起重机能够按照理论轨迹行驶;
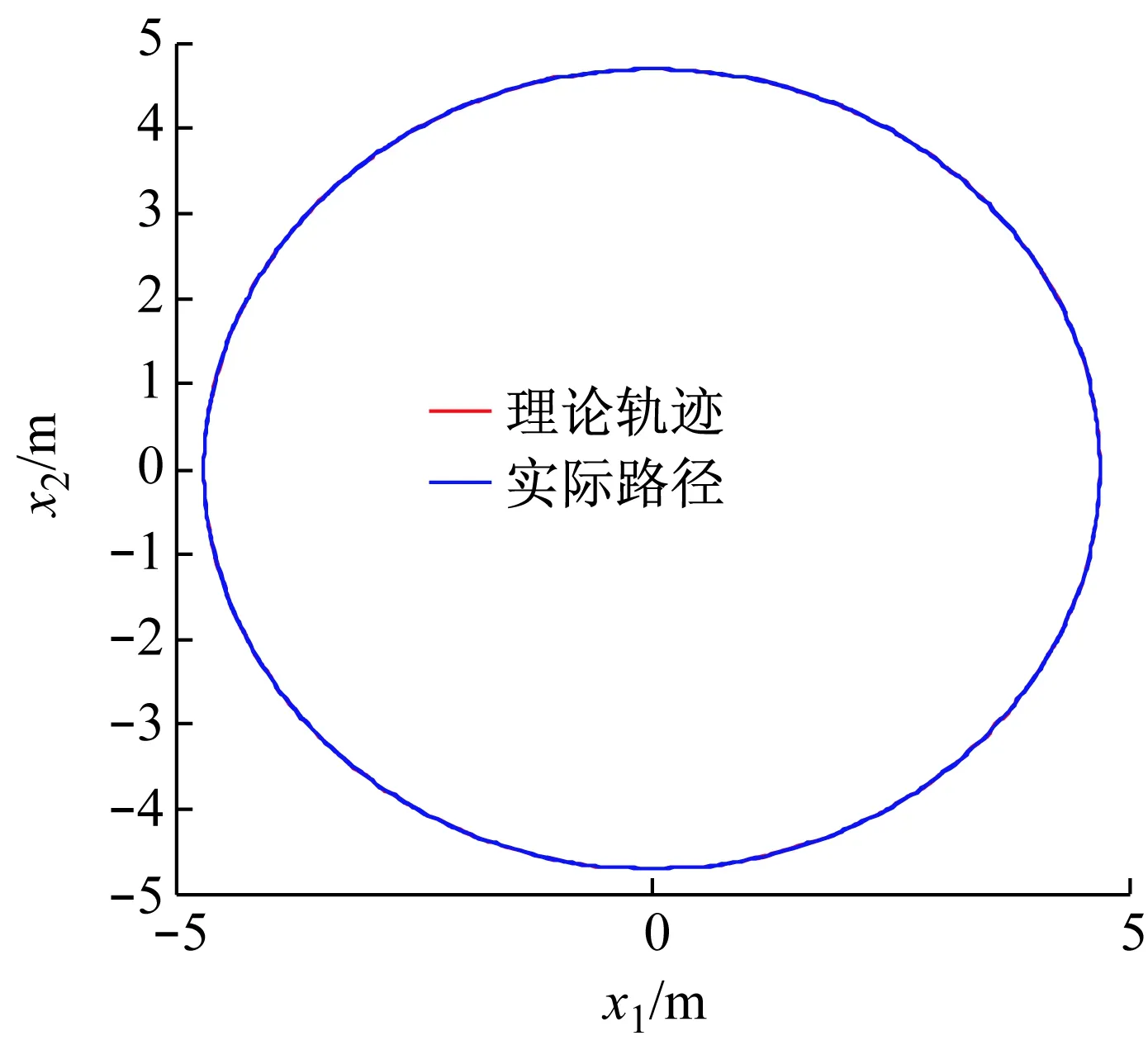
图9 起重机转向路径 (采用滑模控制)
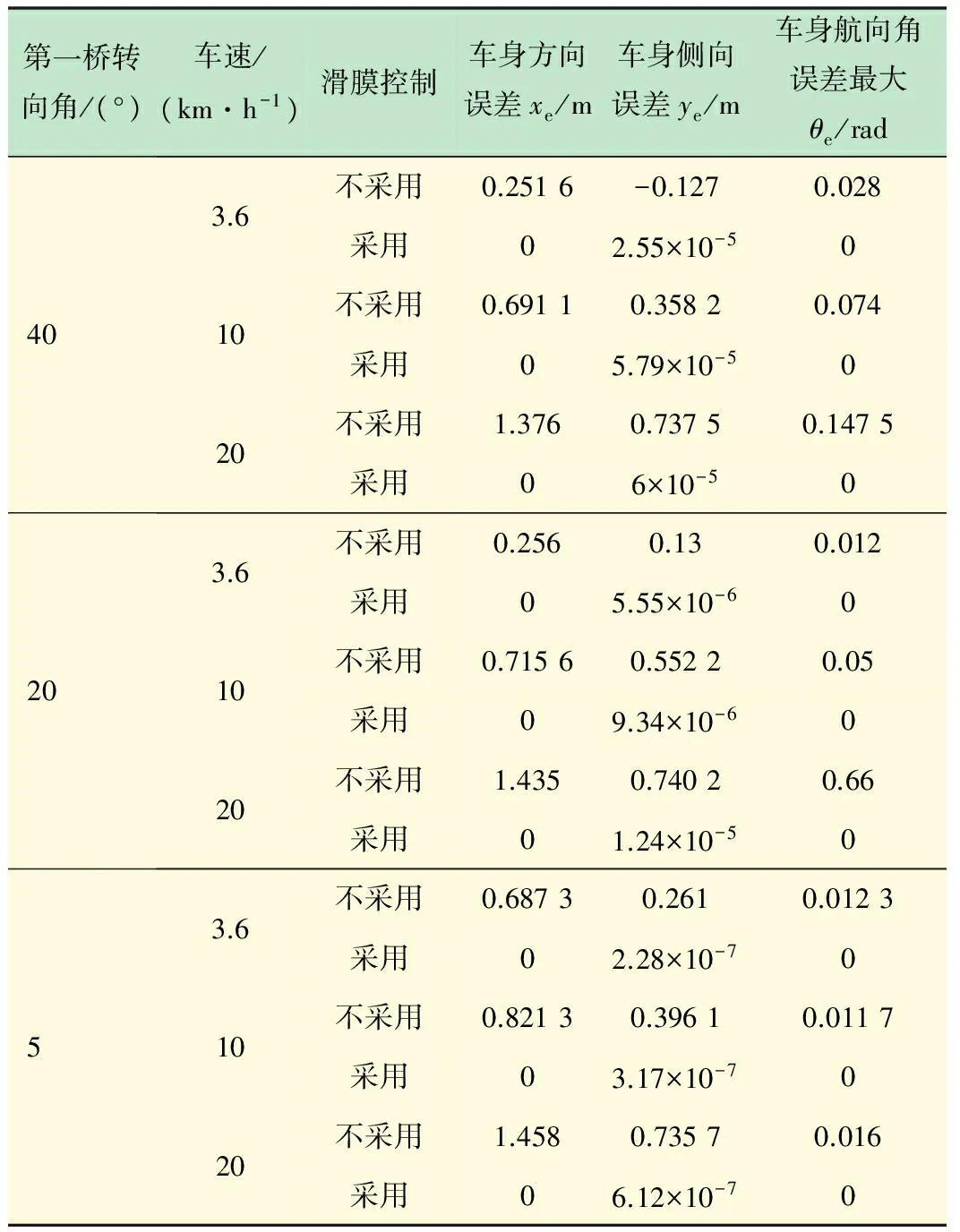
第一桥转向角/(°)车速/(km·h-1)滑膜控制车身方向误差xe/m车身侧向误差ye/m车身航向角误差最大θe/rad403.61020不采用0.2516-0.1270.028采用02.55×10-50不采用0.69110.35820.074采用05.79×10-50不采用1.3760.73750.1475采用06×10-50203.61020不采用0.2560.130.012采用05.55×10-60不采用0.71560.55220.05采用09.34×10-60不采用1.4350.74020.66采用01.24×10-5053.61020不采用0.68730.2610.0123采用02.28×10-70不采用0.82130.39610.0117采用03.17×10-70不采用1.4580.73570.016采用06.12×10-70
(2) 滑模轨迹控制下,行驶速度和一桥转角的增加,都会导致车身侧向误差会增大,而车身方向与航向角误差基本不变;
(3) 不施加控制算法时,行驶速度,一桥转角的变化,会对轨迹跟踪误差三个方面都产生很大的影响。
[1] 史先信.技术引领发展创新铸就辉煌——我国全地面起重机行业技术创新发展之路[J].建设机械技术与管理,2010(10):65.
SHI Xian-xin. Technology Innovation of China All Terrain Crane Industry[J]. Construction Machinery Technology & Management,2010(10):65.
[2] 高秀华,张春秋,李炎亮.多轮转向系统转向控制模式综述[J].起重运输机械,2006(6):5-9.
GAO Xiu-hua,ZHANG Chun-qiu,LI Yan-liang. Review of Steering Control Modes for Multi-wheel Systems[J]. Hoisting and Conveying Machinery,2006(6):5-9.
[3] Aga M,Kusumoki H,Satoh Y,等.四轮主动转向车辆二自由度控制系统[J].国际汽车工程师学会,1990,17(9):69-76.
Aga M,Kusumoki H,Satoh Y,etal. Design of 2-degree-of-freedom control system for active front-and-rear-wheel steering[J].Society of Automotive Engineer,1990,17(9):69-76.
[4] Yasuji Shibahata.底盘控制技术发展状况与趋势[J].控制年评.2005,29(1):151-158.
Yasuji Shibahata.Progress and future direction of Chassis control technology[J].Annual Reviews in Control.2005, 29(1):151-158.
[5] 管西强,屈求真.三轴汽车前后轮转向时的侧向动力学控制[J].机械科学与技术,2002,21(1):69-71.
GUAN Xi-qiang,QU Qiu-zhen,Adaptive Model-Following Control of Four-Wheel Steering Vehicle[J].Mechanical Science and Technology for Aerospace engineering,2002,21(1):69-71.
[6] 李炎亮.全地面起重机多桥动态转向控制系统研究[D].长春:吉林大学,2006.
[7] 张小江.全地面起重机转向性能仿真和试验研究[D].长春:吉林大学,2011.
[8] 孙玉波,高秀华,周富家,等.大型载重车辆电液多轴转向执行机构的模糊PID控制[J].农业工程学报,2007,23(5):100-104.
SUN Yu-bo,GAO Xiu-hua,ZHOU Fu-jia.etal.Fuzzy-PID control of the executive mechanism of electro-hydraulic multi-axle steering system for large heavy truck[J].Transactions of the CSAE,2007,23(5):100-104.
[9] 丁兆义.全路面起重机底盘关键技术浅析[J].机械管理开发,2011(10):8-10.
DING Zhao-yi.Analysis on Key Technique of All-terrain Crane Chassis[J].Mechanical Management and Development,2011(10):8-10.
[10] Razvan Solea,Adrian Filipescu,Viorel Minzu 等.四轮转向车辆的滑模轨迹跟踪控制[C]∥第八次IEEE国际自动化控制会议,中国 厦门,2010:382-387.
Razvan Solea,Adrian Filipescu,Viorel Minzuetal. Sliding-mode Trajectory-tracking Control for a Four-Wheel-Steering Vehicle[C]∥8th IEEE International Conference on Control and Automation,Xiamen China,2010:382-387.
[11] 崔宏巍,车辆动态安全监控实验教学平台的开发[J].实验室研究与探索,2011(8):442-445.
CUI Hong-wei,Development and Research of Vehicle Dynamic Security Supervision Platform for Experimental Teaching[J].Research and exploration In Laboratory.2011(8):442-445.
[12] 张小江,高秀华,赵建国.多轴转向车辆零侧偏角控制策略研究[J].农业装备与车辆工程,2008(6):13-15.
ZHANG Xiao-jiang,GAO Xiu-hua,ZHAO Jian-guo. The Zero Sideslip Angle Proportional Control Research on Multi-axle Steering Vehicle[J].Agricultural Equipment Vehicle Engineering.2008(6):13-15.
[13] 王春行.液压控制系统[M].北京:机械工业出版社,2006:100-114.
[14] 刘金琨.滑模变结构控制MATALB仿真[M].北京:北京大学出版社,2005:262-276.
[15] 高强,王晨光.基于模糊增益调整的双关节机械手滑模轨迹跟踪控制[J].实验室研究与探索,2012(11):78-81.
GAO Qiang,WANG Chen-guang. Trajectory Tracking Control of Sliding Mode Based on Two-joints Robot Manipulator of Fuzzy Gain Adjustment[J]. Research and exploration in Laboratory.2012(11):78-81.
