亚轨道飞行器控制系统快速原型设计
2014-01-17李新国泮斌峰
毛 瑞,李新国,泮斌峰
(西北工业大学 航天学院,陕西 西安 710072)
亚 轨 道 飞 行 器 (Suborbital Reusable Launch Vehicle,SRLV)是一种能够在亚轨道空间完成飞行任务的可重复使用运载器[1],近年来在军事和民用市场的巨大潜力被不断挖掘,具有广阔发展前景。由于飞行器长时间在大马赫数、大攻角下飞行,控制系统的微小偏差或滞后都会对飞行状态产生影响,而在飞行器控制系统的设计初期,传统开发模式一般通过纯数字仿真来分析控制性能,无法检验其应用于实物对象的仿真精度与实时性效果,不利于后续的硬件设计与生产[2]。如何在提升控制性能的同时缩短研发周期、降低研发成本、提高研发效率已经成为亚轨道飞行器控制系统设计的重要问题[3]。
为了实现对飞行器控制系统的快速、廉价、高效等设计需求,提出了一种基于快速控制原型技术 (Rapid Control Prototyping,RCP)的亚轨道飞行器控制系统设计方案,并完成系统的软硬件设计与实时仿真,通过对控制参数快速反复设计调节系统的控制性能。快速控制原型技术采用“V”形开发流程,从模型设计到原型系统实时仿真都在一体化环境下实现[4],便于研究控制器对实物对象的控制效果而且研发成本低廉。
1 SRLV再入段数学模型
选择亚轨道飞行器飞行参数变化剧烈、控制策略复杂的再入过程为仿真阶段,环境模型选择USSA76标准大气模型[5],建立SRLV的再入运动方程组。
SRLV的再入运动可以看作质心运动与绕质心转动运动的合成[6],分别描述SRLV质心的平移运动状态以及飞行器机身绕质心转动的姿态运动。
1)质心动力学方程
SRLV在惯性坐标系以矢量描述的质心动力学方程可以表示为:

将其投影到航迹坐标系中进行求解,经简化后SRLV质心动力学方程如下:

2)绕质心转动的动力学方程
SRLV在惯性坐标系以矢量描述绕质心转动的动力学方程可以表示为:

将其投影到机体坐标系中进行求解,经简化后SRLV姿态动力学方程如下:
2 SRLV再入段控制系统设计
针对亚轨道飞行器再入过程,采用反馈线性化-PID控制方法实现控制系统设计。SRLV再入运动方程组具有显著的非线性特征,本文利用反馈线性化方法[7]对SRLV再入运动方程组进行线性化,得到飞行器的线性化系统模型,将运动方程组分解为纵向运动和侧向运动,整个控制系统解耦为俯仰、偏航和滚转3个通道并分别设计PID控制器。
亚轨道飞行器再入段控制机构主要包括反作用控制系统(Reaction Control System,RCS)与气动舵。再入过程中控制机构分配方式通过桥接函数来表示:
如式(6)所示,由于SRLV再入初期动压很小,气动舵操纵效率低下,完全由RCS控制飞行;随着动压增大并达到q1,气动舵介入操纵,将控制力矩按桥接函数分配给RCS与气动舵;当动压增大至q2,气动舵已经完全可以满足机动要求,RCS停止工作,气动舵独立控制飞行。

图1 亚轨道飞行器控制系统结构图Fig.1 Stucture chart of the suborbital reusable launch vehicle control system
根据亚轨道飞行器动力学与控制系统模型,设计控制系统结构如图1所示,再根据反馈线性化后得到的线性系统对俯仰、偏航、滚转通道分别设计PID控制器。
3 快速原型仿真系统设计
快速控制原型技术是一种新型的实时仿真技术,并引发了技术思维模式的变革,“从概念到硬件”的设计思想也成为实时仿真的新方向。该技术将控制算法下载至原型系统,通过I/O连接被控实物对象,用实时仿真机来模拟控制器与硬件设备连接,组成快速原型系统并进行实时仿真,通过系统快速反复设计以找到理想控制方案[8]。目前,快速原型技术主要应用于控制器产品开发、硬件在回路仿真和系统测试3大领域。
3.1 快速原型开发平台
RtFly是西北工业大学空天飞行器实验室自主研发的快速原型系统开发平台,平台利用Windows的实时扩展子系统RTX作为实时系统,可以迅速便捷地将SimuLink模型转化为RTSS可执行程序,还提供产品型控制器的硬件接口,与硬件设备连接方便。
在实时仿真状态与数据监控方面,RtFly平台可通过图形界面配置对仿真数据进行实时监控、在线调参;平台还提供仿真变量的监控显示控件,如仪表盘、LED、箭头、开关、示波器、旋钮、文本等,RtFly控件添加与参数调节界面如图2所示。
本文选择RtFly作为快速原型开发平台,设计亚轨道飞行器控制系统的快速原型仿真系统,并通过RtFly的在线调参功能实现PID控制器参数的快速可重复设计。
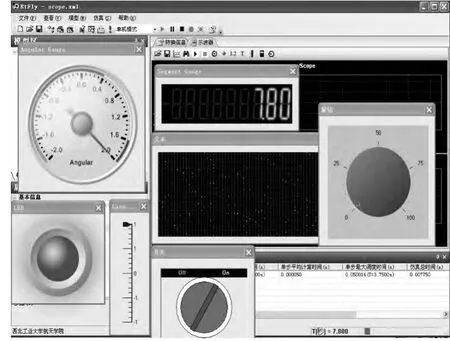
图2 RtFly仿真平台的控件添加与在线调参Fig.2 Control adds and online scheduling on RtFly simulation platform
3.2 快速原型软件系统
软件系统主要功能有仿真算法设计与建模、仿真程序编辑与调试、板卡通讯模块设计与加载、代码实时化编译等。
本文选择Matlab/Simulink作为模型开发及数字仿真平台,实现SRLV数学模型建立、控制系统设计以及数字仿真。Matlab/Simulink提供图形化交互环境,根据动力学模型与控制系统模型,能够迅速建立SRLV再入段控制系统的Simulink框图。
根据Simulink自定义模块的规则定义,使用S函数(system-function)创建板卡驱动程序的自定义通讯模块。调用通讯模块并将Simulink仿真模型分布至两台实时仿真机,通过I/O与硬件设备进行数据交互。
选择Simulink的实时工作间机制 (Real-Time Workshop,RTW)作为代码实时化工具,将 MDL模型文件转化为C++实时代码,RtFly通过编译实时代码直接生成可执行的实时程序RTSS,应用于实时仿真。
3.3 快速原型硬件系统
硬件系统指实时仿真中的硬件与接口设备部分。硬件实物通过接口设备与实时仿真机实现数据交互。
硬件设备主要包括舵机与惯导设备(本文采用惯性测量组件),舵机通过接收D/A传输的模拟信号(电压指令),获得直流偏置电压并与电位器产生压差信号,控制电机转动产生舵偏信号,通过A/D转换为数字信号返回仿真机。惯导设备通过陀螺仪、加速度计分别测量飞行器角速度信号与三轴方向的加速度信号,通过解算得出飞行器角度信号并传输至实时仿真机。接口设备包括以太网卡、VMIC卡、DI/DO、串口、1553b总线、A/D、D/A 卡等。
3.4 SRLV再入段控制系统的快速原型设计
亚轨道飞行器快速原型仿真系统如图3所示,仿真实验装置由一台总体控制计算机、两台实时仿真机以及惯导设备与舵机等硬件设备组成。
总体控制计算机负责仿真管理与指令控制;一台实时仿真机加载SRLV模型,包括动力学模块、环境模块、高度与动压模块等;另一台实时仿真机加载控制系统模型,主要包括PID控制器模块、反馈线性化模块与控制分配模块。

图3 飞行器快速原型仿真系统结构图Fig.3 Stucture chart of the SRLV rapid control prototyping simulation system
网络连接方面,通过以太网连接主控计算机与两台实时仿真机,实现实时化代码下载与仿真管理;通过光纤连接反射内存卡VMIC5565,总体控制计算机、SRLV模型仿真机、舵机、惯导设备组成实时网络。VMIC是基于反射内存(RM)技术的实时网卡,当网络中一个节点对其本地共享内存进行写操作时,该节点的数据更新消息(中断)立即反射至网络中的所有节点,从而达到实时数据传输效果与时钟同步效果。
硬件接口方面,惯导设备通过总线将角度信号发送给SRLV模型仿真机,选择Alta公司的PCI-1553-2型总线板卡作为接口设备,总线传输速度为1M比特每秒,信息格式选择RT-RT(远程终端)方式。
舵机与SRLV模型仿真机通过A/D、D/A通信,选择使用National Instruments公司的PCI-6733型D/A卡与PCI-1742型A/D卡。A/D、D/A是模拟信号与数字信号转换卡,仿真机将气动舵操纵信号通过D/A转换为模拟信号发送给舵机,舵机运转工作产生舵面偏转,模拟信号通过A/D转换为舵偏角的数字信号返回SRLV模型。
两台实时仿真机之间通过串口通信传递仿真数据,通过DI/DO实现时钟的运行同步策略。串口是一种按位传输数据的通信方式,选择Moxa公司的CP118U型串口卡。SRLV模型仿真机通过DO接口发送同步指令给控制系统仿真机,控制系统仿真机通过DI接口接收指令并开始解算控制信号,实现每个步长的时钟运行同步,DI/DO选择研华公司的PCI-1756板卡。
4 SRLV的快速原型仿真
4.1 仿真系统
亚轨道飞行器快速原型仿真系统主要包括SRLV模型、控制模型、舵机、惯性测量组件以及VMIC、A/D、D/A、串口等接口设备。SRLV模型实时仿真机的快速原型仿真模型如图4所示,仿真机通过板卡通讯模块与其他设备交互数据。
4.2 仿真流程
仿真过程分为数字仿真与快速原型实时仿真两部分。具体仿真流程如下:
1)根据亚轨道飞行器数学模型与控制方案完成Simulink建模;
2)进行纯数字非实时仿真,俯仰、偏航、滚转通道分别调试,完成三通道PID控制参数调试,验证仿真模型正确性;
3)建立快速原型仿真模型,用相应的板卡通讯模块代替数字仿真模块,模型转化为带有I/O通讯模块的实时仿真模型;
4)利用RTW实现模型代码实时化,并建立以太网连接总体控制计算机与仿真机,下载仿真模型实时代码;
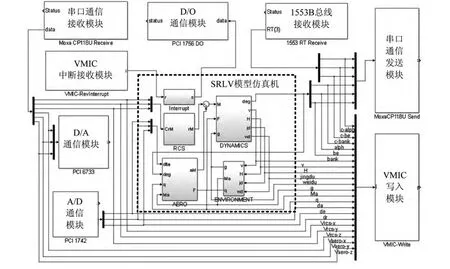
图4 SRLV模型实时仿真机的快速原型仿真模型Fig.4 Rapid control prototyping simulation model on SRLV real-time simulation computer
5)编写与调试串口、VMIC内存卡以及A/D、D/A的驱动程序,将硬件设备通过接口与仿真机连接,组建闭环回路;
6)快速原型实时仿真,利用Rtfly平台的实时调参功能,快速调节各通道控制参数并进行反复设计,实现系统控制性能要求。
4.3 仿真结果
选择仿真初始时刻高度为120 km,末端时刻高度为30 km,仿真步长为t=5 ms,示波器采样频率T=20 ms。
仿真开始前,总体控制计算机运行RtFly3.1,选择模式为主控端模式,载入实时化模型RCP_SRLV.xml并编译;两台实时仿真机运行RtFly3.1,选择模式为客户端模式,通过以太网分别下载SRLV模型与控制系统模型的实时化代码。总体控制计算机对实时仿真机进行初始参数配置,时钟同步策略为运行同步。
仿真运行阶段,总体控制计算机通过VMIC发送启动指令给SRLV模型仿真机、舵机和惯导设备,仿真机将同步指令通过D/O发送至控制系统仿真机,同步解算动力学模型与控制系统模型。每个步长都同步运行,保证仿真系统与硬件实物的实时性要求。仿真界面及参数曲线如图5所示。
仿真结束,SRLV模型仿真机发送结束状态信息给总体控制计算机,总体控制计算机控制其他设备结束仿真,快速原型系统进入复位状态。
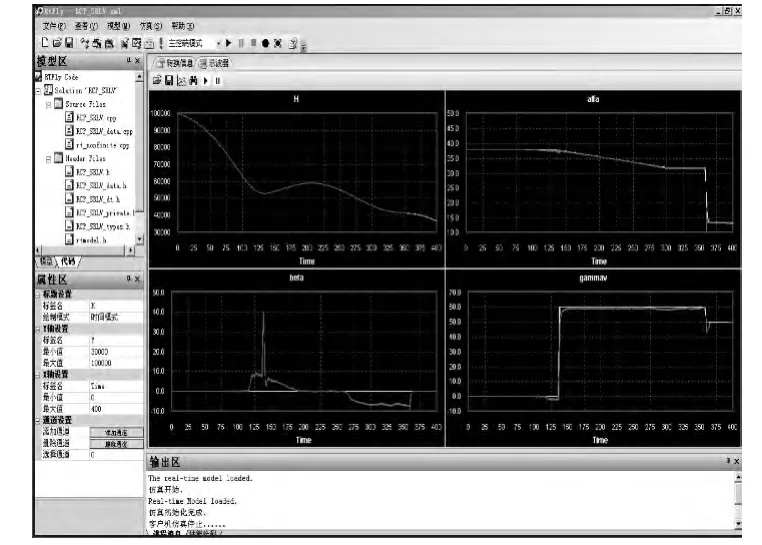
图5 RtFly快速原型仿真Fig.5 Rapid control prototyping simulation on RtFly platform
5 结 论
本文主要研究控制系统的快速原型设计,以亚轨道飞行器为研究对象,选择再入过程为仿真阶段,建立六自由度数学模型,设计飞行器控制系统,完成亚轨道飞行器的快速原型仿真系统设计并进行实时仿真,通过对控制参数快速反复设计达到控制效果。
仿真结果表明,快速原型技术能够有效应用于亚轨道飞行器控制系统设计中,其可重复设计、开发速度快、成本低等特点也符合控制系统设计的发展要求,有望更广泛地应用于飞行器设计的各方面研究与开发。
[1]Martin J C,Law G W.Suborbital reusable launch vehicles and applicable market[R].The Aerospace Corporation,2002, EI Segundo,CA 90245-4691.
[2]王振国,罗世斌,吴建军.可重复使用运载器研究进展[M].长沙:国防科技大学出版社,2001.
[3]管文华,肖爱武.快速原型技术现状与发展趋势研究[J].现代机械,2005,12(3):65-66.GUAN Wen-hua,XIAO Ai-wu.The present situation and the developing tendency research of the rapid prototying[J].Modern Machinery,2005,12(3):65-66.
[4]Chwan-Hsen Chen,Hsu-Lun Tsai,Jun-Chiao Tu.Robot control system implementation with rapid control prototyping technique, 2004 IEEE International Symposium on Computer Aided Control Systems Design,2004.
[5]邹翔,刘芸,任平,等.亚轨道飞行器再入段导航制导快速原型设计[J].微处理机,2010,6(29):98-105.ZOU Xiang,LIU Yun,REN Ping,et al.The design of reentry navigation and guidance rapid prototype for suborbital launch vehicle[J].Microprocessors,2010,6(29):98-105.
[6]李新国,方群.有翼导弹飞行动力学[M].西安:西北工业大学出版社,2004.
[7]汤志杰.非线性反馈线性化方法在飞控系统中的应用[D].西安:西北工业大学,2002.
[8]泮斌峰.导弹制导系统快速原型研究[D].西安:西北工业大学,2007.
