基于环形交叉耦合结构的多电机比例同步控制
2014-01-15贺昱曜
李 凯,贺昱曜
(西北工业大学 航海学院,陕西 西安 710072)
在纺织,印染,冶金等工业传动系统中,多电机协同控制一直是其核心问题之一。常见的多电机协同控制要求各台电机的转速相同,即ω1=ω2=…=ωn,系统的同步系数为1。但是在实际生产中,往往需要电机转速成一定比例,即 ω1∶ω2∶…∶ωn=a1∶a2∶…∶an。 多电机控制的性能优劣则直接影响传动系统的可靠性和产品的质量等[1]。
目前,多电机协同控制的控制方法分为非耦合控制和耦合控制两种。耦合控制最初由Koren于1980年提出,最初目的是提高两轴电机的控制精度,对于3台以上电机补偿规律难以确定[2]。随后,为了控制更多电机同步运行并简化控制结构,各国学者陆续提出了偏交叉耦合控制[3]、相邻耦合控制[4-5]、环形耦合控制[8]等。近年,研究人员为了进一步提高控制系统的控制精度、稳定性、鲁棒性等系统性能,将如模糊控制算法、变结构控制算法的控制算法应用到多电机协同系统,取得良好的控制效果[9-11]。但是,以上方法都是基于同步系数为1的情况,对于各电机转速按一定比例运行的情况则没有考虑,所以以上策略并不适用于需要多电机比例同步控制的情况。
针对这一问题,本文对环形耦合控制做出改进,结合交叉耦合控制结构,并在控制结构考虑同步系数,提出一种环形交叉耦合控制策略,使其适用于多电机比例协同控制。通过计算机仿真,验证了控制结构的稳定性和优越性。
1 改进型环形交叉耦合控制结构
1.1 相邻交叉耦合结构
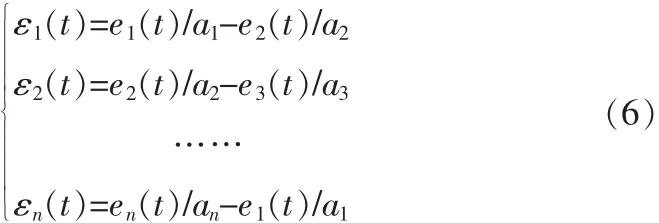
环形相邻耦合控制的思想是对于每一轴电机,仅考虑与其相邻的两轴电机的运行状态,将相邻两轴称为最小相关轴。根据最小相关轴的控制思想,对每一轴的电机控制时,必须且仅仅考虑相邻两台电机的状态,这大大方便了每一轴的控制。对于n台电机的控制系统,每一轴的跟踪误差定义为:
式中,ei(t)为第 i轴的跟踪误差,ωdi(t)为第轴电机的参考速度,ωi(t)为第轴电机的实际转速。
当多电机系统的同步系数a=1时,为了保证各轴转速严格同步运行,在每一轴跟踪误差为0的同时,必须使得:

定义相邻轴之间的同步误差为:

如果所有轴的跟踪误差ei=0,同步误差εi=0,则各轴同步关系即可实现。但是该方法是建立在同步系数a=1的基础上的,而在要求各电机成比例运行的场合则具有很大的局限性。
1.2 改进型环形交叉耦合结构
假设多电机系统中各电机之间转速成一定比例,即ω1∶ω2∶…∶ωn=a1∶a2∶…∶an,通过变换得:

按临近次序定义相邻同步误差为:
将系统分为(n,1,2),(1,2,3),…,(n-1,n,1) n 个子系统,每台电机只和与之相邻的两台电机相关。对于每个子系统,保证其跟踪误差、同步误差趋于0,可保证系统按照要求比例运行。即对于每个子系统,只要保证式(7)成立,可保证系统同步:
定义第i的相邻耦合误差e*i为:

β是各轴之间的耦合因子。
第i轴的控制函数设计为:

由上式可以看出,ui的表达式中包含第i轴跟踪误差和与相邻两轴的同步误差及其积分量,按照经典控制理论,可以设计系统消除跟踪误差和同步误差。
联立式(6)(8)(9)得:

则第i轴的跟踪误差控制函数为:

第i轴同步误差控制函数为:

则第i轴的控制函数为:

根据式(10)(11)本文提出图1所示环形交叉耦合控制结构。
图中,a1~an为同步系数,C1t~Cnt为跟踪误差控制器,C1s~Cns为同步误差控制器。

图1 基于环形交叉耦合的多电机比例同步控制结构Fig.1 Improved ring-cross couple control structure
2 自整定模糊PID控制器
多电机协同控制系统中,为了缓解各电机参数时变、运行环境干扰、非线性等所产生问题,文中利用模糊控制的思想,将模糊控制和传统PID控制相结合,设计出一种模糊PID控制器。
2.1 传统PID控制原理
PID(Proportional Integral Differential)控制是比例微分积分控制的简称。计算机实现PID控制时,控制算法为:

其中,KP、TI、TD分别表示数字算法中的比例、积分和微分系数。
2.2 自整定模糊PID控制器
自整定模糊PID控制器由模糊推理机制和传统PID控制器组成,图2为自整定模糊PID控制系统的结构图:
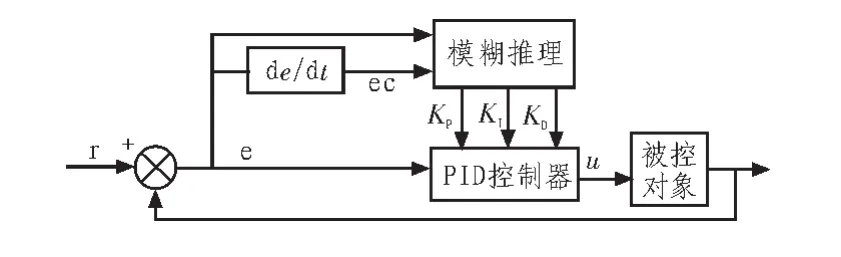
图2 自整定模糊PID控制系统结构图Fig.2 The structure of self-tuning fuzzy PID controller
该控制系统采用双输入三输出机构,电机的转速误差e和误差变化率ec为输入,PID控制器的三个参数为输出。在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec对控制参数的要求,而使被控电机有良好的动态和静态性能。
PID参数是在其初始值的基础上自整定得出的,即KP=KP0+ΔKP, KI=KI0+ΔKI, KD=KD0+ΔKD,其中 KP0、KI0和 KD0分别为PID参数的初始值,ΔKP、ΔKI和 ΔKD分别为模糊推理得出的PID参数的自调整量。将误差e和误差变化率ec及PID参数的自调整量 ΔKP、ΔKI和 ΔKD通过乘以量化因子 Ke、Kec、KΔKP、KΔKI、KΔKD模糊化至模糊变量 {NB,NM,NS,Z,PS,PM,PB} 上,以此表示负大、负中、负小、零、正小、正中、正大。输入输出的模糊论域均为{-6,6},隶属度函数均取三角函数。根据专家经验,归纳出49条模糊规则,并制定出表1所示模糊规则表。

表1 ΔKP/ΔKI/ΔKD的模糊规则表Tab.1 The fuzzy control rule table of ΔKP、ΔKIandΔKD
将模糊推理所得到的模糊结果通过反模糊化重心法进行解模糊, 转化为 ΔKP、ΔKI、ΔKD的精确值, 从而得到模糊PID控制器的PID参数。
3 计算机仿真
文中采用4台3相4极永磁同步电机进行计算机仿真。4台电机模型的参数如表2,其中Rs表示定子电阻,Ld、Lq表示电子直轴和交轴的电感,F表示永磁体产生的磁链,J表示电机转子的转动惯量,假设电机的粘滞系数为0。
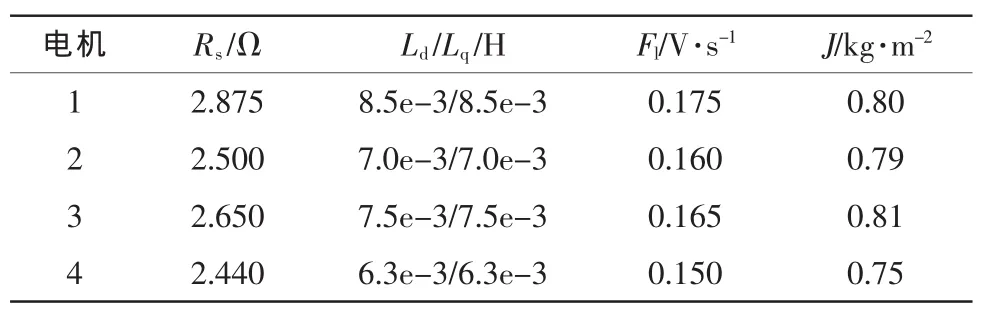
表2 4台永磁同步电机的参数配置Tab.2 Parameter setting of the four PMSMs
仿真的控制结构如图1所示,系统各轴的转速比为ω1:ω2:ω3:ω4=1:1.05:1.052:1.053, 设第一台电 机的给定转速为ω1=100 rad/s,在第 3.5 s降速为 ω2=90 rad/s,在 5 s时给 4台电机等幅的干扰。
跟踪误差控制器的各项参数为:Ke=0.25,Kec=1/5 000,KΔKP=2,KΔKI=1.5,KΔKD=0.001;同步误差控制器的各项参数设置为:Kec=1/1 000,Ke=0.25,KΔKP=0.2,KΔKI=1.5,KΔKD=0.000 15;跟踪误差控制器的初始值设置为:KP0=18,KI0=7,KD0=0.007;同步误差控制器的初始值设置为:KP0=0.2,KI0=20,KD0=0.001;仿真结果如图3所示。
由图3(a)可以看出,4台电机的跟踪误差均能在2 s内趋于稳定;由图3(b)可见,在系统变速或者受到扰动时,波形产生一定程度的波动,但是很快会恢复稳定,说明系统具有很强的收敛性和抗扰动性;系统的比例同步误差也随着转速的稳定快速收敛于零,且最大误差不超过2.5%,出现扰动时波形变化很小且恢复很快,说明系统具有很好的同步精度。文中环形交叉耦合控制结构,最大同步误差不超过4%,相对于文献[8]中的环形耦合控制结构,同步误差降低20%;本文策略相对文献[7]减少了1/3的控制器,相对于其中提出的改进型相邻耦合控制结构同步误差减了20%~30%,同步效果明显提高。
4 结束语
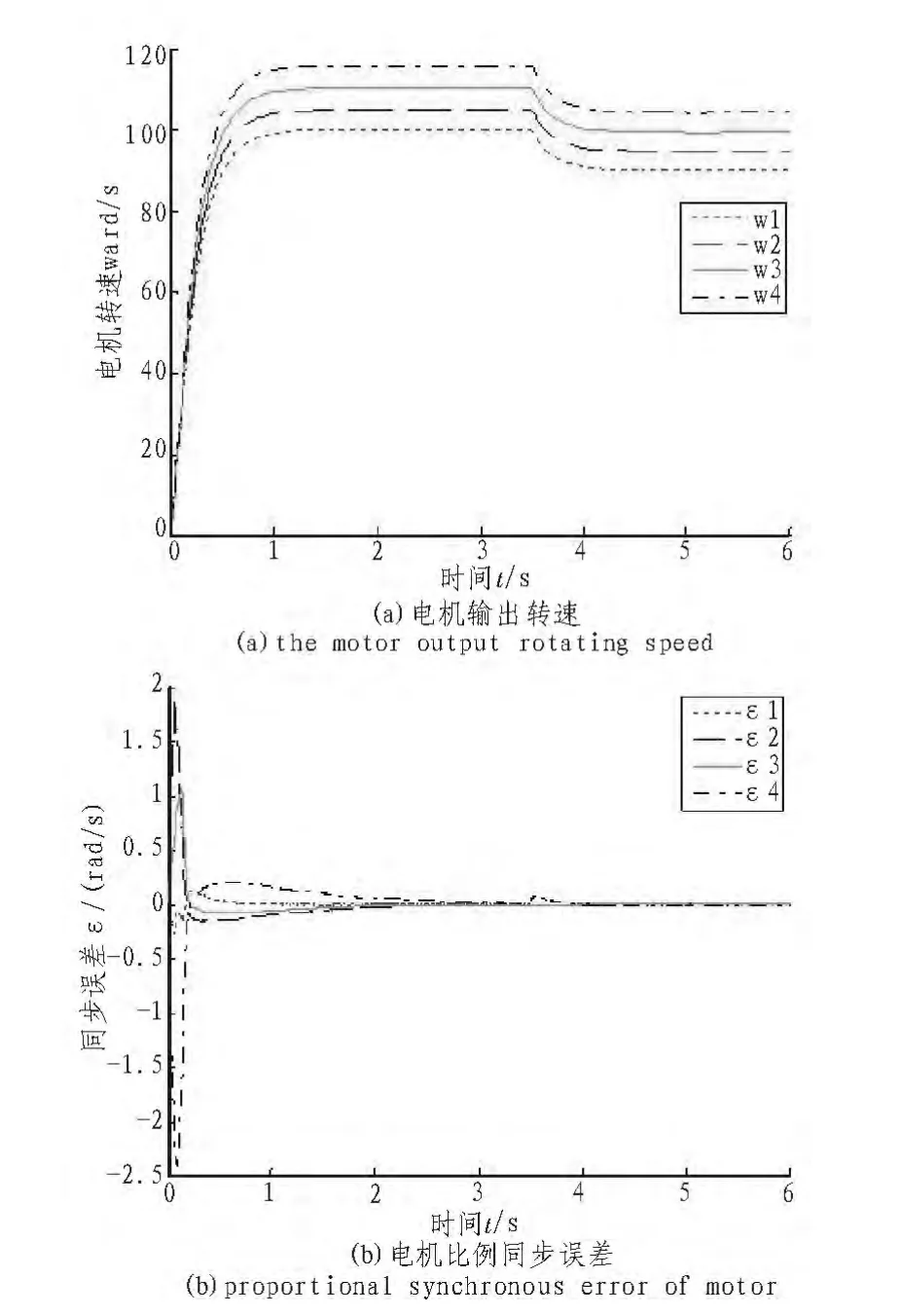
图3 改进型环形耦合结构模糊PID控制仿真曲线Fig.3 The simulation curves of the improved ring-cross couple fuzzy PID control
文中针对多电机协同控制问题,对环形耦合控制策略做出了改进,突破了其只能应用于狭义多电机同步控制的局限,使其能够适用于多电机转速成比例运行的多电机系统。在实际应用,电机往往存在参数时变、负载扰动、非线性等未知情况,文中设计了一种自整定模糊PID控制器。计算机仿真表明,该改进型环形交叉耦合结构模糊PID控制算法具有较快的收敛速度和较好的同步控制精度,能很好的实现多电机比例同步控制。该方法在工业生产如金属、布匹生产中的产品拉抻中,能很好的提高产品的质量和合格率,在军工领域如火炮、雷达的目标轨迹跟踪,可以减小跟踪的轮廓误差,提高跟踪精度。该控制结构对实际工业应用具有较大的参考价值。
[1]刘坤.多永磁同步电机同步控制策略的研究[D].长沙:中南大学,2011.
[2]Koren Y.Cross-coupled bixaial computer control for manufacturing system[J].ASME Journal of Dynamic System.Measurement and Control, 1980,102(12):1324-1330.
[3]Francisco J,Gerardo C,Ismaei A V.Relative coupling strategy[C]//Power Engineering Society.IEEE International Electric Machines and Drives Conference,Madison,2003:1162-1166.
[4]Shin Y T,Chen C S,Lee A C.A novel cross-coupling control design for Bi-axis motion[J].International Journal of Machine Tool and Manufacture,2002,42(14):1539-1549.
[5]张承慧,石庆生,程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报,2007,27(15):59-63.ZHANG Cheng-hui, SHI Qing-sheng, CHENG Jin.Synchronization control strategy in multi-motor systems based on the adjacent coupling error[J].Proceedings of the CSEE,2007,27(15):59-63.
[6]胥小勇,孙宇,蒋清海.改进型相邻耦合结构的多电机比例同步控制[J].仪器仪表学报,2012,33(6):1254-1260.XU Xiao-yong,SUN Yu,JIANG Qing-hai.Improved adjacent cross-coupling control structure for multi-motor proportional synchronization control[J].Chinese Journal of Scientific Instrument, 2012, 33(6):1254-1260.
[7]刘然,孙建忠,罗亚琴.基于环形耦合策略的多电机同步控制研究[J].控制与决策,2011,26(6):957-960.LIU Ran, SUN Jian-zhong, LUO Ya-qin.Research on multidrive synchronization control based on ring coupling strategy[J].Control and Decision,2011,26(6):957-96.
[8]王国亮.基于模糊PID补偿器的多电机同步控制策略研究[D].沈阳:东北大学,2006.
