带水平倾角的被动声定位双三角阵模型
2014-01-13狄长安刘新爱
狄长安,闵 想,刘新爱,边 鹏
(1.南京理工大学机械工程学院,江苏 南京 210094;2.中国科学院电子学研究所,北京 100190;3.北方华安工业集团有限公司,黑龙江 齐齐哈尔 161006)
0 引言
立靶精度(射击准确度和射击密集度)是身管武器考核时的重要技术指标,射击密集度一般用弹着点坐标的中间误差来表示[1]。当测试靶面超过2m×2m,在进行自动检靶时,一般采用声定位的方法检测弹着点坐标[2-3]。研究表明,声传感器布阵模型对弹着点坐标的检测精度影响较大,且随着靶面的增大,检测误差会进一步增大。目前,比较实用的水平双三角阵定位模型在有效靶面为10m×10 m时,定位误差可达±2cm[4]。但随着小口径炮弹着点的校验指标不断提高,对弹着点的检测精度提出更高的要求,±2cm 的定位误差已经不能满足立靶密集度测量要求。针对此问题,本文提出了带水平倾角的被动声定位双三角阵模型。
1 水平双三角阵定位模型
被动声定位水平双三角阵定位原理如图1 所示,在弹道的垂直方向上构建一个虚拟靶面,其中,传感器M1、M2、M3与M4、M5、M6分别构成两组等边三角形,并沿y 轴左右对称,M1、M3、M4、M6在同一直线上水平放置。当超音速弹丸垂直射入靶面时,会产生激波,并传至各声传感器,根据传感器M1~M6在坐标系中的相对位置以及弹丸激波到达各传感器的时间差,可建立被动声定位水平双三角阵定位模型:

式(1)中,p(x,y)为弹着点坐标,(xi,yi)、(xj,yj)为任意两个声传感器的坐标,ti、tj为激波到达对应声传感器的时间,vh为激波传播速度在靶面方向的分量。通过式(1)可展开成9个非线性方程,通过求解该非线性方程组可以得出弹着点坐标P(x,y)。
仿真计算及实验数据表明[4],在靶面的中心区域的测试误差在±2cm以内,但边缘区域的误差相对较大;而且在安装过程中,还会人为的引入随机误差,这给传感器阵的定位精度与其稳定性造成一定的影响。

图1 水平双三角阵定位模型Fig.1 Location model of horizontal double triangle array
2 带水平倾角双三角阵定位模型
图1研究的是等边三角阵型的水平放置情况,当M1M3、M4M6与水平面存在一个夹角θ时,此时,水平双三角阵定位模型可转换为图2所示模型。

式(2)中,a为等边三角形的边长(基阵臂长),b为两三角形的半间距,θ为传感器阵与水平轴的夹角,t12~t16分别为弹丸激波到达声传感器M1与其他各传感器的时间差。
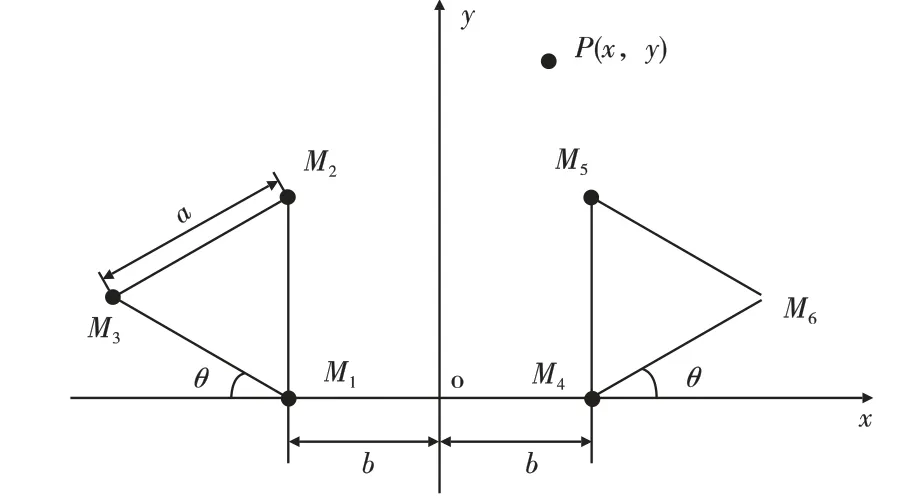
图2 传感器布阵示意图Fig.2 Diagram of sensors array
3 仿真计算与误差分析
非线性方程组的数值解法有多种,例如:微分方程数值解法、加权余量法、变分法。但针对本系统模型所建立的方程组,加权余量法中的最小二乘法(Gauss-Newton法)为最优算法,该算法根据系统的精度要求设定迭代次数[5],在不影响计算精度的前提下可减少主控芯片的计算时间,因此本文采用最小二乘法,对定位模型进行仿真计算。
在大靶面的弹着点自动检靶系统中,测试精度随着测试范围增大而降低,因此,在进行仿真计算时,需要重点关注测试靶面的边缘区域的测试精度[6]。由于声传感器呈左右对称分布,测试区域也关于y 轴呈对称分布,因此只需要在第一象限进行仿真计算。沿着测试区域x轴方向,在0~5m 范围内,步进0.5m进行等间距划分;沿y轴方向,在1~11m 范围内,步进1m 进行等间距划分。划分后的测试区域网格,如图3所示,可分别对每个小的测试区域网格的边界点进行仿真计算分析。
在满足测试精度要求的前提下,考虑到声传感器安装尺寸、安全性对现场定位装置体积的要求以及安装运输的方便,设定声传感器沿x轴方向布阵的总长不超过2.5m,沿y轴方向的布阵总不超过0.5m。
1)当θ=0°,a=0.3m,b=0.7m时的水平双三角阵的定位精度为±2cm[4]。保持a=0.3 m,b=0.7m不变,θ在0~180°范围内连续取值,由于篇幅限制,仅给出如图4所示的具有代表性的θ的仿真分析结果(θ为25°、50°、75°、100°)。
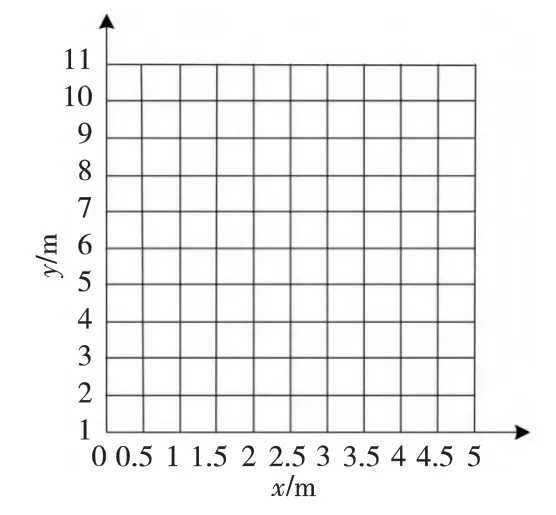
图3 仿真测试点的分布图Fig.3 Distribution diagram of simulation points
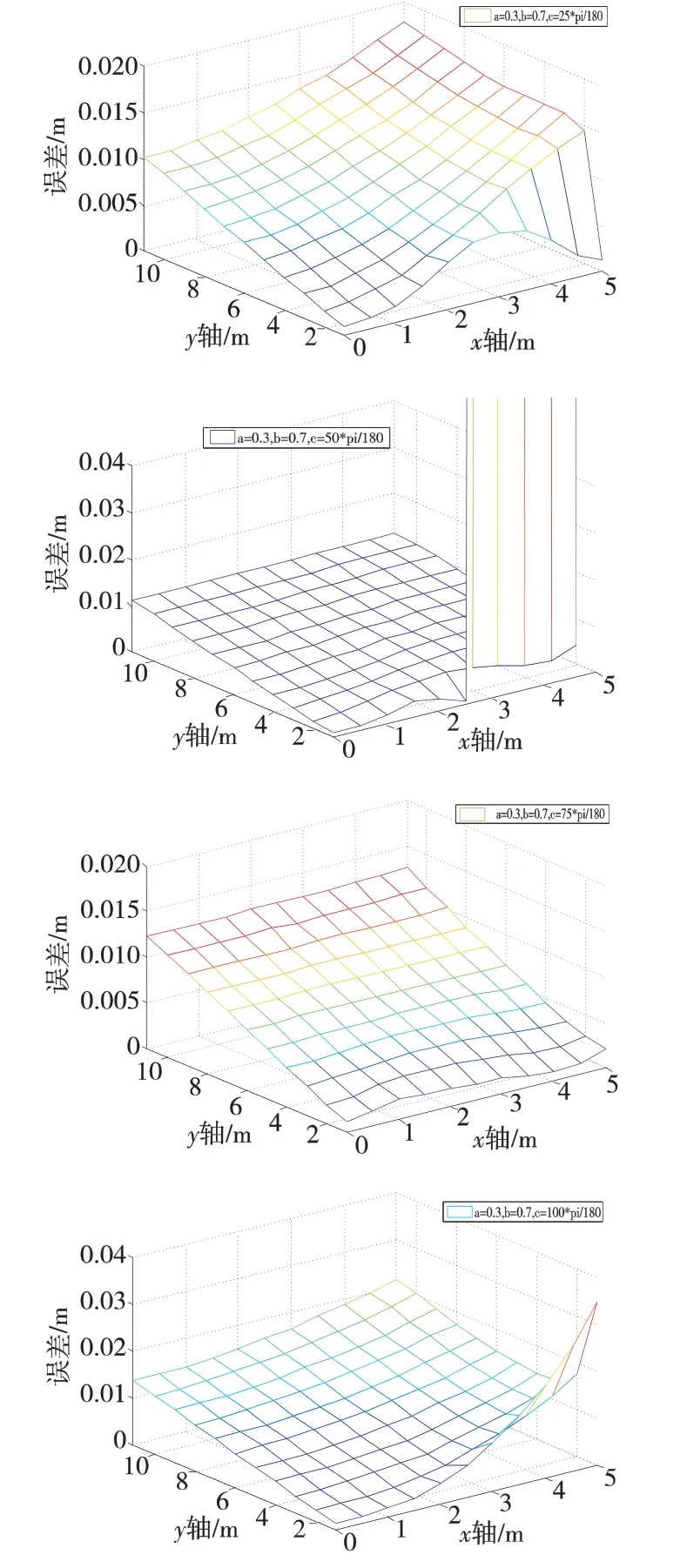
图4 测量误差随θ变化的仿真图Fig.4 Simulation of measuring error variation byθ
图4表明:在y轴方向上,系统的测量误差随y值的增大成递增趋势,边缘的测试误差随着θ的增大呈先增后减、再递增的状态,其中θ=75°时误差最小。x 轴方向上,系统的误差大小相对比较平稳,但是θ=25°、100°时,边缘测试区域的测量误差相对较大,已逼近0.02m;当θ=50°,虽然在大部分区域的测试误差都在0.015m 以内,但在靶面的边缘区域测量误差较大;当θ=75°时,同一y 值对应各测试点的误差大小基本相同,而且最大的误差仅为0.013m,因此可基本确定θ取75°,相比普通的水平双三角阵的±0.2m 具有明显的提高。
2)确定了水平倾角后,为获取更高更稳定的测试精度,需重新对模型参数a、b的配比进行优化分析。考虑到传感器基阵的安装方便与精度,设定a+b=1m(水平方向布阵长度为2m),且a、b按照步进为0.1m 的变化,保持θ=75°不变,相关仿真结果如图5所示。

图5 测量误差随变化a、b的仿真图Fig.5 Simulation of measuring error variation by a and b
由图5的仿真结果表明,布阵模型的测试精度随着a/b的减小而增大,理论上优先考虑a=0.1 m,b=0.9m,但若a长度过小,会影响到传感器的安装精度,而且其误差曲线的斜率相对较大,将降低其稳定性能。因此选取a=0.2m,b=0.8m较为合适,此时,定位误差可控制在±0.012m 以内。
3)传感器支架加工以及安装传感器时均会引入误差,仿真时需考虑安装误差对测试系统精度的影响。由于a与θ 同属于一个构件,其精度可通过加工精度来保障,当a为0.2m 时,a的误差易控制在50μm,平面度控制在20μm 以内,此时,当基阵间距引入1mm 安装误差时相关仿真计算结果如图6所示。图6表明,定位误差可控制在±0.012m以内,可以满足测量精度要求。

图6 测量误差随安装误差变化的仿真结果Fig.6 simulation of measuring error change by installation error
4 结论
本文提出了带水平倾角的被动声定位双三角阵模型。该模型与水平双三角阵的区别在于三角基阵带有水平倾角,并且模型的各项参数都得到了进一步优化。在合理地选择模型参数的情况下,能在10 m×10m 的有效测试靶面内能获得更高的测试精度。仿真计算结果表明:当水平倾角θ为75°时,臂长a为0.2m、基阵间距2b为1.6m 的双三角阵的测试效果最佳,弹着点测试误差从普通水平双三角阵的2cm 减少至1.2cm。
[1]肖峰,李惠昌.声,武器和测量[M].北京:国防工业出版社,2002:7-10.
[2]Zhang Jinsong,Walpola Malaka,Roelant David,et al.Self-organization of unattended wireless acoustic sensor networks for ground target tracking[J].Pervasive and Mobile Computing,2009(5):148-164.
[3]张飞猛,战延谋,周刚峰,等.声学立靶弹着点测试数学模型与误差分析[J].应用声学,2006,25(4):252-257.
[4]蒋东东.基于被动声定位的大靶面弹着点坐标测量方法研究[D].南京:南京理工大学,2011.
[5]薛 毅.数 值 分 析 与 科 学 计 算[M].北 京:科 学 出 版社.2011.
[6]蒋萍,狄长安.基于声学立靶的传感器阵列模型研究[J].火炮发射与控制学报,2011,(4):38-40.