无线局域网络定位研究进展
2014-01-10田世伟李广侠
杜 锋,田世伟,李广侠
(解放军理工大学 通信工程学院,南京 210007)
1 引言
随着无线网络技术和普适计算的快速发展,基于位置识别的服务(location based services,LBS)正越来越多的受到工业界和学术界的关注。其中,定位技术是实现LBS的关键,它被运用于旅游导航、目标识别和个性化信息传递等许多方面[1-2]。
全球定位系统(global positioning system,GPS)是当今最流行的定位技术,它通过GPS卫星信号接收机捕获、测量来自至少4颗在轨卫星的广播信号到达延迟时间来估算终端位置,可以提供覆盖全球范围以及高精度、全天候的连续定位能力。但是在室内和楼宇林立的复杂城市环境中,微弱的GPS无线电信号无法穿透建筑物,因此在这种环境下GPS定位效果并不理想[3-4]。而当今日益普及的无线网络技术被认为是解决这一问题的关键[3]。
IEEE 802.11协议是无线局域网络(wireless local area networks,WLAN)领域的国际通用协议。该协议于1997年被首次提出,两年后提出的802.11b主要对原协议在物理层上进行改动,加入了高速数字传输的特性和连接的稳定性,后来又提出的802.11g是802.11b在同一频段上的扩展,它们是当今使用最为广泛的WLAN通信协议。802.11b协议[5]规定的工作频段为2.4GHz,最高传输速率为11Mbit/s,支持的范围是在室外为300m,在办公环境中最长为100m。同时,在802.11b协议信号传输帧结构中,包含同步头(synchronization header,SHR)、物 理 层 报 头(physical layer header,PHR)和物理层服务数据单元(PHY service data unit,PSDU)。其中同步头由两部分组成——测距前导码(synchronization,SYNC)和帧分隔符(synchronization frame delimiter,SFD)。SYNC借助扰码可以判定接收信号是否为WLAN信号,SFD通过发送一长串同步码来确定接受信息的起始时刻,在同步与测距中,借助于这两点信息可以实现定位[6]。
室内定位技术的研究方法主要包括基于超声波定位技术、基于红外定位技术、基于超宽带定位技术、射频识别定位技术(WLAN、ZigBee)等[7]。
考虑将WLAN技术运用于定位主要有三个方面的原因[8]:首先,无需专门的硬件,因为当今几乎所有的手机都能支持802.11b/g网络协议架构;第二,由于WLAN覆盖范围不断扩大,在大多数工作和生活环境下人们都能很方便地通过接入点(access point,AP)接入802.11b/g网络;第三,在大多数情况下,WLAN都能为LBS提供较为准确的室内定位。
本文首先介绍了WLAN定位系统的结构。其次借助于测距原理对三种WLAN定位技术进行综述。然后根据WLAN定位技术的难点,结合最新研究成果描述WLAN技术在定位方面的发展历程和研究方向。最后对全文进行了归纳与总结。
2 WLAN定位技术
2.1 WLAN定位技术的原理
WLAN定位系统主要分为三个模块,如图1所示。数据采集模块是指用户终端网卡主动扫描或被动监听其接收范围内各WLAN信道上的AP信号,根据不同定位算法使用度量指标不同,可以提取AP信号的传输时间、到达角度和信号强度等信息。这些信息传递给定位模块,根据不同算法选用不同信息进行定位计算。最后,显示模块将计算结果显示出来,表达方式分为位置坐标和符号表达。
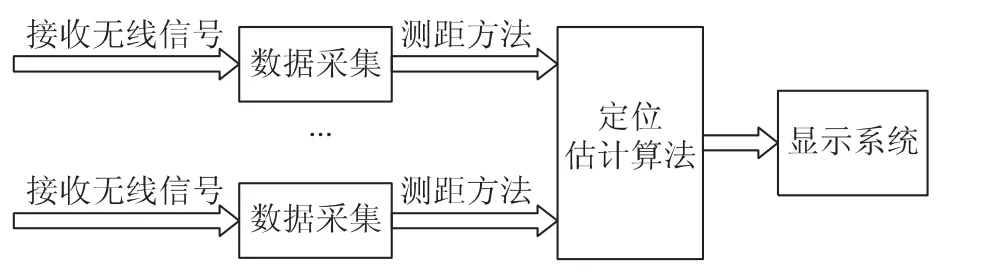
图1 基于无线局域网络定位系统的功能模块
2.2 定位方法
近似感知、几何测量和场景分析是求解位置的三种基本方法。在WLAN中,近似感知方法为最强基站法,几何测量方法包括到达时间(time of arrival,TOA)、到达时间差(time difference of arrival,TDOA)和到达角(arrival of angle,AOA),场景分析方法包括指纹识别法和信号传播模型方法。
2.2.1 近似感知
最强基站法是将无线设备接入点AP的位置近似为用户所在位置,这是一种最简单的定位方法。该方法受限于AP的覆盖范围,难以实现精确定位[1]。
2.2.2 几何测量
在二维平面上,TOA方法通过选取三个参考点分别与待测目标的连线作为半径,各自画出一个圆,三圆的公共区域即为待测目标的可能位置(如图2所示),在三维空间中则需要4个参考点作球面相交来定位。
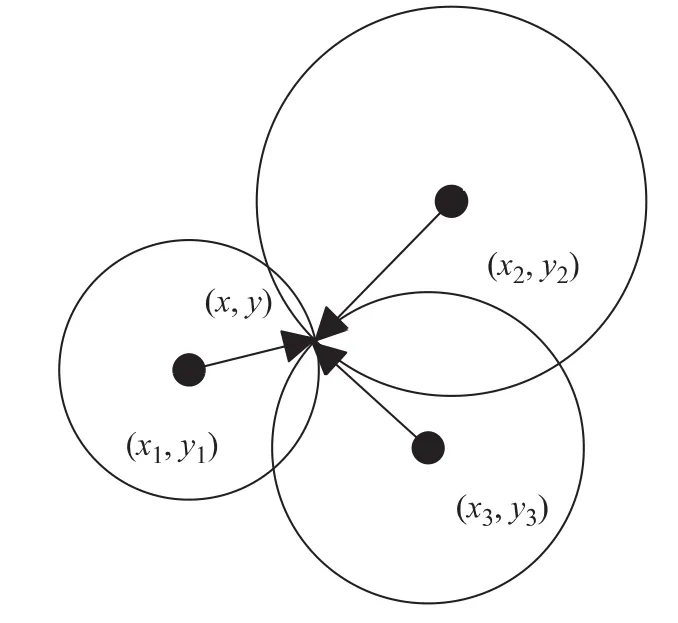
图2 TOA的测距定位模型
WLAN通过TOA,即测量无线信号到达用户终端的时间来测量距离。该方法能实现精准定位,但由于无线信号在空气中以光速传播,1μs的时间误差将导致300m的误差,因此要求收发双方有非常精准的时钟同步,硬件要求高,所以目前在WLAN定位中运用不多。
TDOA是对TOA的一种改进方法。它通过测量信号到达两个参考点的时间差,而不是绝对时间来估计待测点的位置,降低了时间同步要求。但由于需要配置测量时间的硬件,这种方法主要应用在蜂窝网定位,在WLAN定位中应用不多[4]。
AOA在二维平面中是通过已知的两个参考点位置分别到达待测目标的角度进行位置估计(如图3),角度的测量主要借助于阵列天线实现。在室内环境下由于墙壁、桌子等遮挡,测量角度会存在误差[4]。
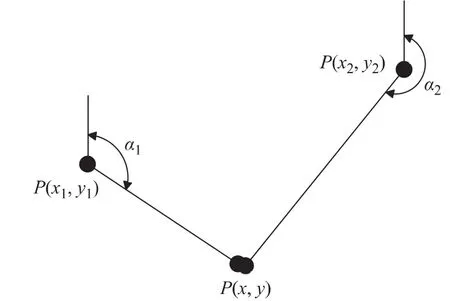
图3 AOA的测距定位模型
2.2.3 场景分析
场景分析是利用在某一有利地点观察到场景中的特征来推断待测目标的位置,它分为静态场景分析和差动场景分析两种。在静态场景分析中,待观测的特征用来在一个数据库中查询,并将其映射为场景中的位置。相对的,差动场景分析通过追踪连续的场景间的差异来估计位置[4]。
场景分析方法包括指纹识别法和信号传播模型方法。指纹识别法由于算法灵活、定位相对准确,因而成为研究的热门方向[9-10],这部分内容将在下一小节详细介绍。
传播模型方法是对无线信号在室内传播衰减模型进行的研究,该方法可以减轻实际采样的工作量。考虑墙壁影响的无线信号模型可以表示为
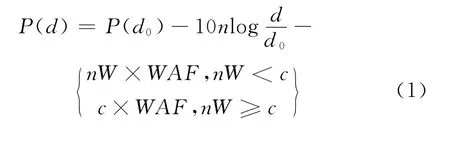
式(1 中,Pd0表示在参考距离d0处的信号强度,n表示信号强度随距离增加的衰减速度,d表示信号发送方和接收方之间的距离,nW表示信号发送方和接收方之间的墙壁数,c表示衰减因子能够分辨出的最大墙壁数,WAF指信号经过墙壁的衰减因子。
但是,发射机和接收机之间的障碍对信号传输的影响事先很难确定,文献 [8]给出了一个经验值OAF取代障碍影响的经验模型,使得上面的模型可以简化为

式(2)中,OAF取为15dBm。虽然这个模型不是很精确,但能满足实际应用。
2.3 WLAN定位技术的难点
利用RSS的进行场景分析的重要前提是接收信号强度随着AP与待测目标距离的增大而减小,由于室内环境复杂,会对RSS产生干扰,主要表现在以下三个方面:
(1)室内环境复杂。信号在传播过程中会受到墙壁、天花板等的干扰,使得信号发生发射、折射、衍射等现象,使信号传播产生多径效应。
(2)IEEE 802.11b/g工作在2.4GHz条件下,信号传播过程中容易受到其他使用相近频段电器的干扰,比如微波炉。
(3)室内环境的复杂还表现在人和物的移动使得室内定位系统必须适应环境变换,不断修正参数,保证定位的准确性。
2.4 基于指纹识别的WLAN定位技术
2.4.1 基本原理
指纹识别算法是一种基于联合AP集的定位技术,观测者通过在场景一些点测得来自各AP信号的强度。指纹识别分为两个部分:离线勘测阶段和在线定位阶段。离线勘测阶段主要是记录场景选取的特定点的指纹信息,并建立RSS与场景中位置的对应关系数据库;接下来,基于无线设备的待测目标在场景中通过AP接收到的信号强度,借助特定算法进行处理,然后在数据库中寻找与计算结果最相近点对应的位置坐标,就可估计为该点位置坐标,从而完成在线定位。
2.4.2 离线勘测阶段
离线勘测的目的是建立一个特定场景特征信息与移动设备之间的对应关系的数据库。在场景中,任一点所测得AP信号的个数和强度都是唯一的,因此可以通过在场景中设定特定采样点的方法测量RSS。在这个阶段,需要完成的工作是手持移动设备在目标场景中进行逐个采样点信息测量,测量点一般以网格形式进行分布,并且要求尽可能多的覆盖整个场景。
在采集AP信号方面,并不是所有信号都对定位产生积极影响。根据不同的定位方法,提取合适的AP点信号值进行计算,可以提高定位的准确度,并减小计算冗余[2,11]。
由于存在信号衰落和其他干扰,被观测点接收到的信号强度会随时间而变化,因此必须对每个测量点进行多次采样。而文献 [1]将相邻AP之间的距离缩小,即采用更小的单元网格同样获取更好的适应了环境的变换。此外,由于环境变换也会影响RSS的值,所以每次环境变换后都需要重新测量,使得该阶段计算成本高,并且会产生定位时延[11],基于此,文献 [12]提出了将RSS转化为首要原件(principal components,PCs)并进行分析,增强了对RSS信号变化的稳定性。
2.4.3 在线定位阶段
借助于离线勘测阶段建立的数据库,在线定位技术是通过特定算法对当前位置观测到的RSS进行计算得出待测目标的估计位置。
根据离线勘测阶段对获取到的RSS的不同处理算法,定位方法可以分为确定性方法和概率性方法。
确定性方法是一种比较简单的位置指纹定位技术。位置指纹数据库针对每个采样点保存相应位置处各可见AP的信号强度平均值。通过采用欧氏几何距离或其他类型距离(如Manhattan距离)度量测量值与位置指纹之间的差异,并取差异值最小的指纹位置作为估计位置。可以描述成为

式(3)中,RSSi和FPi为实测数据或位置数据库中第i个AP的信号强度。
由于确定性方法只计算了信号的均值,而忽视了方差、条件分布等内容,因此该方法未能充分利用RSS信号的信息。概率性方法是在实测信号强度的基础上,借助于概率与统计的知识,计算得出待测目标在各点处的条件概率和后验概率,最终得出条件概率最大的一个对应位置处后验概率估计值XMAP。设采样位置和实测AP信号强度对应符号分别表示为x,y,则概率性方法可用公式表示为

为计算py|x(y|x),现有两种方法:核方法、直方图方法[12]。
另外还有其他基于概率性方法的指纹识别定位技术为:贝叶斯算法、粒子滤波器法和马尔可夫方法。文献 [13]引入一种改进的贝叶斯回归算法,能动态地估算和校准数据库,从而省去了离线勘测阶段;文献 [10]将粒子滤波器与似然函数相结合组建适应性似然函数粒子滤波器(adaptive likelihood particle filter,ALPA)运用于恶劣环境,解决了随时间推移传播信号产生的非线性问题,并且达到了比传统方法更好的准确度;文献 [9]提出了一种基于马尔可夫—蒙特卡洛方法实现可放在口袋里的智能手机定位方法,该方法的平均误差在4m左右。
2.5 最新定位技术介绍
以上所介绍的是基于测距原理分类的定位方法,但随着越来越多的学者在这一领域的不断探索,基于其他方法和系统的定位研究不断涌现。
2.5.1 定位算法
在定位算法方面,可以分为两类,第一类是运用多种定位算法结合进行定位,这种方法将至少两种算法进行结合,提高定位精度。第二类是创新定位算法,这类方法具有指导意义,是提出的新算法。
在多种定位算法结合方面,文献 [2]将不同网络定位信息智能地融合在一起,提出了分两步实现定位的多无线电信号直接融合(direct multiradio fusion,DMRF)和本征无线电信号协同定位(cooperative eigen-radio positioning,CERP)算法[14],首先DMRP对多种无线网络信息进行空间相关性分析,并去除冗余信息,然后借助于CERP对各信号特性进行有效组合以实现高精度定位,在现实环境下与单一的全球移动通信系统(global system for mobile communications,GSM)、数字视频广播(digital video broadcasting,DVB)、频率调制(frequency modulation,FM)和 WLAN相比,定位误差减小了44.19%~48.88%。文献 [15]将室内定位和压缩感知相结合,提高了定位精度,RSS信号借助于压缩感知理论进行重构,通过粗定位和精定位两个阶段,实验结果表明此定位方法比传统指纹识别方法提高了定位精度,并降低了计算复杂度。文献 [16]根据RSS模型设计出的定位算法无需离线勘测即可实现定位,这种算法无需知道包括AP布局在内的室内环境,移动设备记录其接受范围内AP接收信号强度,并发给定位服务器,所有报告的测量值受到无线传播物理现象的约束,借助于EZ定位算法对这种约束进行模拟,并采用遗传算法进行计算,实验结果表明定位效果良好,并且误差可控[16]。
在创新定位算法方面,文献 [17]采用声学背景光谱(acoustic background spectrum,ABS)指纹识别技术进行定位,这种方法的优点在于紧密、便于计算、对短暂声音干扰具有很好的鲁棒性,该方法同样需要进行离线勘测,并与数据库中的指纹进行匹配,从而寻找最相近的点进行定位,实验中与只用WLAN进行定位结果相比,该方法定位精度更高。文献 [18]指出室内定位过程中有很多干扰信号和误差,提出基于遗传(genetic algorithms,GA)的定位算法,该算法优势在于无需太多节点信息。文献 [2]采用基于判别适 应 性 神 经 网 络(discriminant-adaptive neural network,DANN)不断地将有效信息插入判别元件并递归更新网络中数据权重的方法,准确地构建了RSS信号和位置之间的非线性关系。
可以看出,目前研究者的主要目标是改善复杂环境下的定位精度和误差,如何能够提高精度并且减少代价,两者之间存在一个平衡问题。
2.5.2 定位系统
国外关于室内定位系统的研究比较成熟,其测量信号包括无线电信号、红外信号、射频信号和超宽带信号等,根据不同的测距方法和指纹识别算法,研究者们制作出一些主要的定位系统如下:
Olivetti实验室研发的Active Badage室内定位感知系统是最早的室内定位系统之一[19]。该系统采用红外定位技术,对每个带定位目标使用红外发射机定期发送惟一识别码。
麻省理工学院研制的Cricket室内超声波无线射频定位系统,是基于TOA测距的三边定位系统[20]。Cricket系统通过无线射频信号控制参考信号,计算声波信号的传播时间。由于射频信号传播速度远大于声波信号,因此该方法误差较小。
微软公司开发了RADAR室内跟踪定位系统[21],它综合经验数据和衰减因子模型,采集大量数据进行指纹识别来确定目标位置,并提供定位服务和运用。这一系统后来由华盛顿大学陈俊华改进,他主要采用鲁棒性的匹配模块和向量模块对使用者进行定位。
哈佛大学研制的MoteTrack是基于无线传感器网络的室内定位追踪系统[22],系统仅仅通过使用无线电波就能够确定一个移动点的位置,精度达到米级。这个系统是很多当前研究室内定位系统的原型。
2.6 不同定位算法优缺点比较
本文主要讨论了不同定位算法和系统的研究情况,表1对这些算法与系统从精度,造价和复杂度方面进行了比较,并列出各自优缺点表1所示:
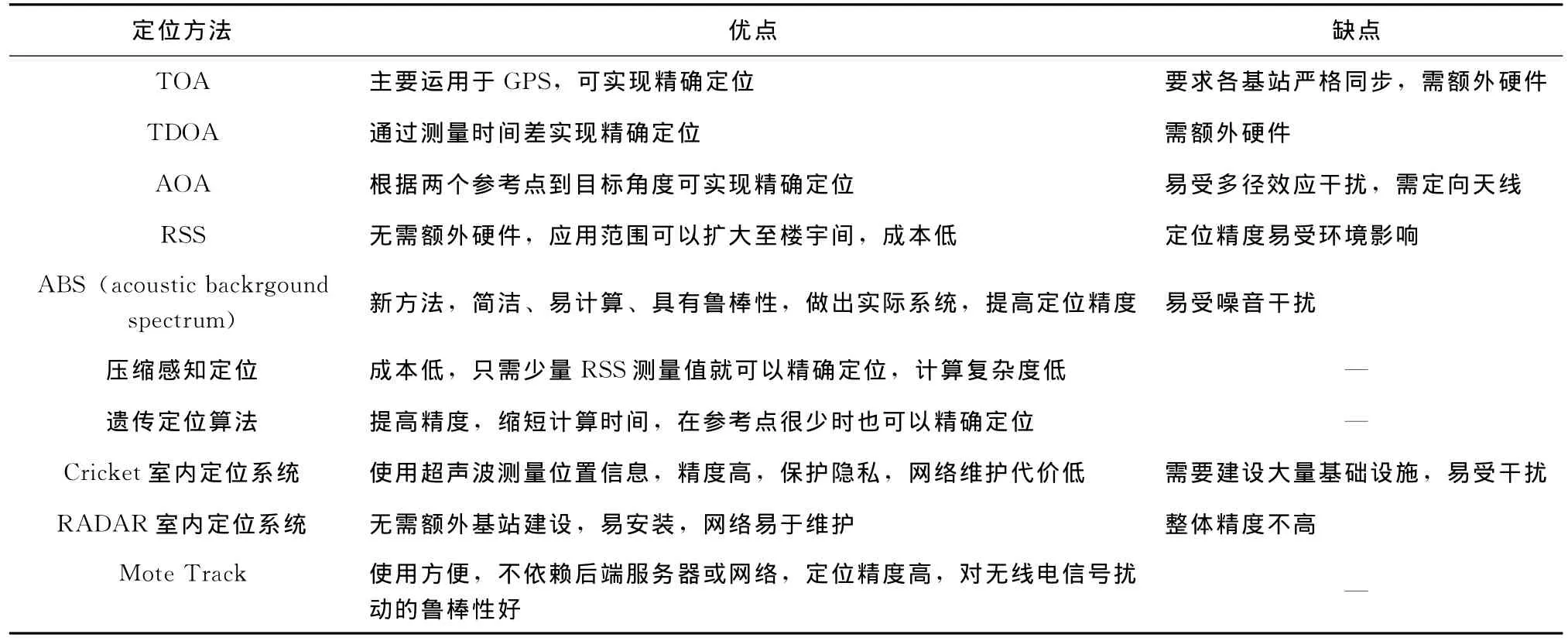
表1 不同定位算法优缺点比较
从以上对比可以看出,各定位算法和系统都有优缺点,虽然有些没有给出缺点,但并不代表没有缺点。在定位精度比较高的情况下,造价和计算复杂度也比较高,而在定位精度低的系统中,其造价和复杂度也比较低。因此,在定位系统研制过程中,需考虑精度、造价和复杂度之间的平衡。
3 总结与展望
本文介绍了基于WLAN的多种定位方法,由于近似感知方法定位准确度不高、基于几何测量方法需增加额外硬件并且在室内环境下测量受阻,而基于指纹识别的场景分析方法无需额外硬件、定位算法灵活、准确度高,因此越来越受到研究者的青睐,其中基于概率性方法能充分利用RSS信号的信息,比确定性方法具有更好的定位效果。
在定位技术不断改进的同时,未来的研究方向将会是朝着增强定位系统易用性、对环境变换的适应性方向发展,主要包括以下四个方面:首先,影响RSS的因素中各部分所占比例、接入点安放位置对定位的影响等问题还未进行深入的研究。第二,室内是一个人群密集的环境,如利用其他人的信息实现精准定位也是一个有趣的研究方向。第三,基于不同网络信号特点,如何整合异构网络,为用户提供更加方便的服务也是一个值得思考的问题。第四,随着云计算技术的发展,本文提出的方案是可以考虑将一些安装固定AP的大型公共场所的离线勘测数据库存储在云端进行处理,从而减小计算成本和系统时延。
[1] CHENG Yu-chung,CHAWATHE Y,LAMARCA A,et al.Accuracy Characterization for Metropolitan-scale Wi-Fi Localization[EB/OL].[2014-02-18].http://research.microsoft.com/en-us/um/people/jckrumm/publications%202005/irs-tr-05-003.pdf.
[2] FANG Shi-hau,LIN Tsung-nan.Indoor Location System Based on Discriminant-adaptive Neural Network in IEEE 802.11 Environments[J].IEEE Transactions on Neural Networks,2008,19(11):1973-1978.
[3] LIU Ren-ping,HEDLEY M,YANG Xun.WLAN Location Service with TXOP[J].IEEE Transactions on Computers,2011,62(3):589-598.
[4] 张明华.基于 WLAN的室内定位技术研究[D].上海:上海交通大学,2009.
[5] IEEE Std 802.11b-1999,Wireless LANs[S].
[6] KING T,HAENSELMANN T,EFFELSBERG W:Deployment,Calibration,and Measurement Factors for Position Errors in 802.11-Based Indoor Positioning Systems[EB/OL].[2014-02-18].http://link.springer.com/chapter/10.1007%2F978-3-540-75160-1_2#page-1.
[7] ATHALYE A,SAVIC V,BOLIC M,et al.A Radio Frequency Identification System for Accurate Indoor Localization[EB/OL].[2014-02-18].http://www.diva-portal.org/smash/get/diva2:552325/FULLTEXT01.pdf.
[8] CHEN Yi-bo,LUO Rong.Design and Implementation of a WiFi-based Local Locating System[C]//Proceedings of 2007 IEEE International Conference on Portable Information Devices(PORTABLE07).Orlando,FL:IEEE,2007:1-5.
[9] LIU Yan,WANG Qiang,LIU Jun-bin,et al.MCMC-based Indoor Localization with a Smart Phone and Sparse WiFi Access Points[C]//Proceedings of 2012IEEE International Conference on Pervasive Computing and Communications Workshops(PERCOM Workshops).Lugano,Switzerland:IEEE,2012:247-252.
[10] PRIETO J,MAZUELAS S,BAHILLO A,et al.Adaptive Data Fusion for Wireless Localization in Harsh Environments[J].IEEE Transactions on Signal Processing,2012,60(4):1585-1596.
[11] BOONSRIWAI S,APAVATJRUT A.Indoor WiFi Localization on Mobile Devices[C]//Proceedings of 2013 10th International Conference on Electrical Engineering/Electronics,Computer,Telecommunications and Information Technology(ECTI-CON).Krabi,Thailand:IEEE,2013:1-5.
[12] FANG Shi-hau,LIN Tsung-nan.Principal Component Localization in Indoor WLAN Environments[J].IEEE Transactions on Mobile Computing,2012,11(1):100-110.
[13] ABDELLATIF M,MTIBAA A,HARRAS K A.et al.An Energy Efficient Architecture for WiFi-based Indoor Localization on Mobile Phones[C]//Proceedings of 2013IEEE International Conference on Communications(ICC).Budapest:IEEE,2013:4425-4430.
[14] FANG Shi-hau,LIN Tsung-nan.Cooperative Multi-radio Localization in Heterogeneous Wireless Networks[J].IEEE Transactions on Wireless Communications,2010,9(5):1547-1551.
[15] FENG C,AU W S A,VALAEE S,et al.Compressive Sensing Based Positioning Using RSS of WLAN Access Points[C]//Proceedings of IEEE INFOCOM 2010.San Diego,CA:IEEE,2010:1-9.
[16] CHINTALAPUDI K,PADMANABHA I A,PADMANABHAN V N.Indoor Localization without the Pain[C]//Proceedings of the 16th Annual International Conference on Mobile Computing And Networking.New York:ACM,2010:173-184.
[17] TARZIA S P,DINDA P A,DICK R P,et al.Indoor Localization without Infrastructure Using the Acoustic Background Spectrum[EB/OL].[2014-02-18].http://stevetarzia.com/papers/ABS_mobisys.pdf.
[18] WU Tin-yu,LIAO I-ju,LEE Wei-tsong,et al.Enhancing Indoor Localization Accuracy of Sensor-based by Advance Genetic Algorithms[C]//Proceedings of the 6th International Wireless Communications and Mobile Computing Conference.New York:ACM,2010:1218-1222.
[19] WANT R,HOPPER A,FALCAO V,et al.The Active Badge Location System[J].ACM Transactions on Information Systems(TOIS),1992,10(1):91-102.
[20] PRIYANTHA N B,CHAKRABORTY A,BALAKRISHNAN H.The Cricket Location-support System[C]//Proceedings of the 6th Annual International Conference on Mobile Computing and Networking.New York:ACM,2000:32-43.
[21] BAHL P,PADMANABHAN V N.RADAR:An In-building RF-based User Location and Tracking System[EB/OL].[2014-02-18].http://www.tik.ee.ethz.ch/~beutel/projects/picopositioning/radar_microsoft_positioning.pdf.
[22] LORINCZ K,WELSH M.A Robust,Decentralized Approach to RF-based Location Tracking[EB/OL].[2014-02-18].http://www.eecs.harvard.edu/~konrad/projects/motetrack/moteTrack.pdf.
