仿生柔性并联机器人的逆运动学与优化设计
2013-12-23孙黎霞宋洪刚高丙团
孙黎霞 宋洪刚 高丙团 汤 奕
(1河海大学能源与电气学院,南京 210098)(2东南大学电气工程学院,南京 210096)
在生化试验、战争和抢险救灾等特殊情境下,人们需要穿戴防化服和防毒面具等个人防护装置(PPE)以及通讯设备进行作业,PPE在人头颈动作时会产生噪声[1-3].为了提高在此类噪声情况下人们的通讯质量,需开发一种低运动噪声的仿人头颈机器人.基于文献[1-3]提出的仿人头颈系统,本文给出一种简化的以压缩弹簧模拟颈椎和3根绳索模拟颈部肌肉的仿人头颈并联机器人.
仿人头颈作为仿人机器人中的一个重要部分,其驱动结构类型可分为两大类:串联式和并联式.与传统串联机构相比,并联机构具有运动惯性小、承载能力高、动态响应快等优点[4],而绳索驱动的并联机构除具有上述优点外,还具有工作空间大、精度高、可远程驱动等特性[5],因此近年来得到越来越多的研究者关注.SAYA机器人的颈部由一根弹簧和几根气动的人工肌肉组成,其中弹簧支撑人头模型,气动的人工肌肉驱动头部运动[6].iCub机器人颈部有2种并联结构形式[7]:① 由1个压缩弹簧和3根相隔120°驱动绳索组成;② 1个球副脊柱和3根双向驱动腿组成.在James仿生机器人中也有一种类似于第一种结构形式的头部模型[8].但是,上述文献中未对系统逆运动学进行定量分析.
由于绳子只能产生单方向的拉力而不能产生推力,因此对于具有n个自由度的绳索驱动机器人一般至少需要n+1根驱动绳索[5].文献[3]给出的4绳索驱动的柔性仿人颈系统在实现仿人颈的Pitch和Roll两自由度运动时存在一个冗余度,从而使得系统成本增大.理论上,并联机构中实现仿人颈的两自由度运动只需要3根120°分布的绳索,且3根绳索驱动的仿人颈并联机构是研究多绳索驱动的仿人头并联机构的基础.鉴于此,本文针对3根绳索驱动的柔性仿人头系统的运动学和静力学进行深入的研究,在此基础上对3根绳子在基座和动平台的端点位置进行了优化设计.
1 机构描述
本文研究的并联结构基本组成如图1所示,其主要包括4个部分:
1) 基座.它是机构的固定部分,在其上定义一个全局坐标系OXYZ.坐标系的原点在弹簧底部的几何中心处,Y轴沿OA1方向,X轴与Y轴垂直;Z轴由右手法则确定.
2) 动平台.它是机构的非固定部分,在其上定义一个局部坐标系oxyz.坐标系的原点在弹簧顶部的几何中心处,y轴沿oB1方向,x轴与y轴垂直,z轴由右手法则决定.

4) 弹簧.连接基座和动平台,利用其产生的力或力矩支撑机器人头部负荷并实现头部运动.图2中O点和o点之间是一条曲线.在O点处,曲线的切线方向垂直于基座所在平面;在o点处,曲线的切线方向垂直于动平台所在平面.


图1 绳索驱动的柔性并联机构原理图
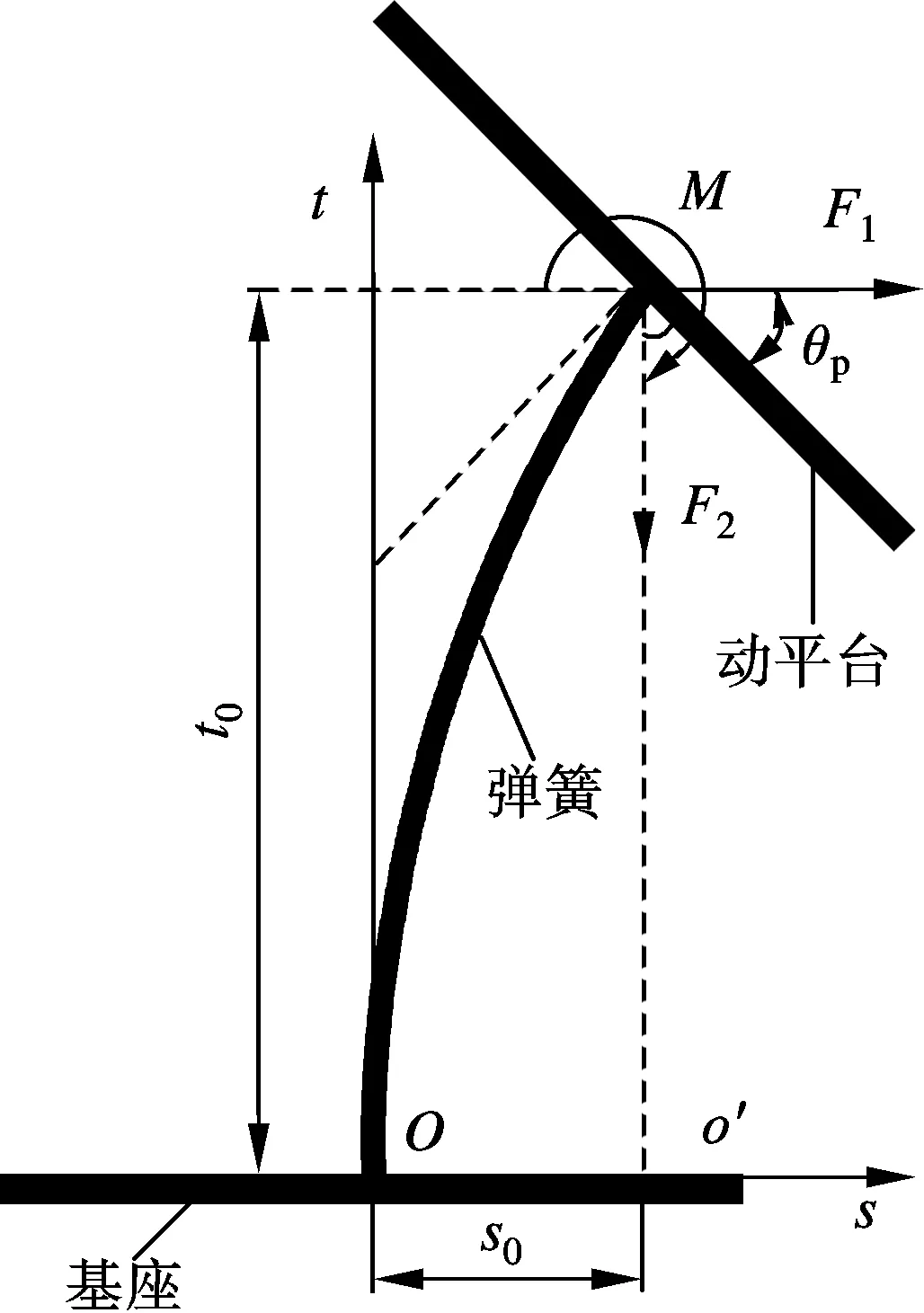
图2 弯曲平面内等效力系统
在上述假设成立的情况下,动平台的结构可量化出4个参数:θs为s轴与X轴的夹角;θp为基座平面与动平台平面之间的夹角;t0为动平台原点到基座平面的垂直距离;s0为基座原点O与o′之间的距离.当然也可以设置其他参数来描述动平台的结构配置.对于上述4个参数,其中只有3个是独立的.一般把s0看作是其他3个参数的依赖性参数,即一旦给出θs,θp,t0的值,便能求出s0,此时s0一般被看作由其他3个参数决定的伴随运动[3].机构中动平台的姿态可以用θs,θp来描述,在其值给定的情况下,可得到动平台的姿态变换矩阵.
全局坐标系下,基座上Ai(Oa1,Oa2,Oa3)点的齐次坐标为
类似地,给出动平台上的Bi(ob1,ob2,ob3)点的齐次坐标,即
利用罗德里格斯公式[9-10],得到从局部坐标系至全局坐标系下的旋转矩阵ORo,即


从而得到局部坐标系至全局坐标系下的齐次坐标变换矩阵OTo,即
2 逆运动学和静力学分析
在逆运动学分析中,已知机器人动平台的姿态矩阵,求解绳子的长度li.令x=[θs,θp,t0]T∈R3,q=[l1,l2,l3]T∈R3,则两者之间的关系可表示为
q=f(x),f:R3→R3
如果通过x求出s0,则OTo可完全确定且各绳长由li=‖Oai-OToobi‖求得.由于s0是弹簧侧弯时发生的一种伴随运动,其值不能随意设定.因此,为了获得解决方案,将结合机构的逆运动学和静力学进行分析.
2.1 力和力矩平衡方程
由上文假设可知,所有绳子中的拉力均可转化成平面Ost内的力和力矩,否则说明弹簧不在该平面内弯曲.如图2所示,将绳子的拉力等效成Ost平面内2个互相垂直的力F1,F2及过o点且垂直于Ost平面的力矩M.
一般情况下假设动平台不受其他外力的作用,此时,动平台可被看作o点处一个质量为m的点,则力和力矩平衡方程为

(1)

(2)

在式(1)、 (2)中共有7个未知量,分别为T1,T2,T3,F1,F2,M和s0.消除T1,T2,T3后可得到只含有F1,F2,M和s0四个未知量的方程,再结合由弹簧侧向弯曲方程导出的3个方程,便可求解上述4个未知量.方程(1)和(2)可分解为

(3)

(4)

(5)

(6)


(7)

(8)

假设a≠b或者s0sinθp+t0(cosθp-1)≠0,且θs≠kπ/2(k=0,1,2,3,…),综合式(3)~(8)可得


asinθpcos2θst0)F1-absinθpsinθs(a-

(9)
2.2 弹簧侧向弯曲方程
由文献[2]中对弹簧侧向弯曲问题的分析可知,F1,M均可表示成s0的函数,即
F1=D1s0+E1
(10)
M=D2s0+E2
(11)
式中

将式(10)、(11)代入式(9),可得到一个关于s0的二次方程,即
(12)
式中
本文需要找到一个s0∈R≥0.一旦s0确定,其他所有未知量都可以求出.
2.3 特例分析
在2.1节中,假设a≠b或s0sinθp+t0(cosθp-1)≠0,且θs≠kπ/2,得到方程(9).
对于假设a≠b或s0sinθp+t0(cosθp-1)≠0是为了得到如下等式:
(13)
当等式(13)不成立时,则要求a=b且s0sinθp+t0(cosθp-1)=0;而对于这一情况只有在θp=0时才成立,但由于其代表头颈没有做弯曲动作,因而研究意义不大,故假设θp≠0,从而保证式(13)恒成立.
当θs=kπ/2时,由2.1节可知,θs在区间[0,2π]内存在4个特殊的点,即θs=0,π/2,π,3π/2.本文仅对θs=π的情况进行推导说明,其他特殊情况与其推导过程类似.

结合式(10)、(11)可得到一个类似于式(12)的关于s0的二次方程,从而可求出此时s0的值.
2.4 数值实现
压缩弹簧的参数如表1所示,其中,l0为弹簧原长,h0为弹簧螺距,G为剪切模量,E为弹性模量,r为弹簧半径,d为弹簧丝的直径,K为弹簧弹性系数.由此可计算出弹簧的转动惯量I和抗弯刚度β0,即


表1 压缩螺旋弹簧的参数
其他参数选择为a=0.06m,b=0.05m,m=0.05kg.因在实际应用中,t0用来调整3根绳子的预紧力,故仿真时t0取固定值0.085m.通过改变θp∈[0,π/9]和θs∈[0,2π],得到如图3所示的结果.
由图3可知,每根绳子的拉力和长度互补,即绳子长度较小时,绳子的拉力就较大;θp越大,绳子的长度和拉力变化范围就越大;当θp一定时,所有绳子的长度和拉力随θs在0~2π内的变化曲线是对称的,为了更清楚观察这一特点,绘制了θp=π/9,t0=0.085m时所有绳子长度和绳子拉力随θs∈[0,2π]的变化曲线,如图4所示.

图3 逆位置和静力学

图4 θp=π/9,t0=0.085m时绳长与拉力随θs的变化曲线
3 绳子的优化布局
基于并联机构的逆运动学和静力学综合分析,可以对绳子的布局进行优化设计以得到最小的绳子驱动力,从而减小驱动器的规模,降低成本.为实现这一目标,首先要确定优化变量.根据以上推导可知,除变量a和b外,其余变量已给出或需要求解,故选择a和b为优化变量,两者分别表示绳子在基座和动平台上的端点位置.
本节将基于不同的目标函数,通过数值方法来获得最佳的a和b.由于机构中共有3根绳子的拉力,需定义适当的目标函数来评估力的大小.下面定义2种目标函数分别为3根绳子的拉力之和Tsum与最大绳子拉力Tmax:

式中,Tsum和Tmax分别表示电动机平均出力和最大出力.因绳子只能产生单向驱动力,故绳子拉力均为非负值.因此,定义中含有的绝对值可以去掉.用T表示以上2种目标函数.则T是θs,θp,a,b的函数(t0=0.085m),即
T=ξ(θs,θp,a,b)ξ:R4→R
由2.1节可知,求出Ti的表达式,从而可求得T的解析表达式.由于T的解析表达式一般非常复杂,因此本文将采用数值迭代法推算其最优解.
定义一个关于a和b的优化目标函数g(a,b),g:R2→R,则最小化问题可表示为
g(a,b),al≤a≤au,bl≤b≤bu,Ti≥0
式中,al,au,bl和bu分别是a和b的下限和上限,均可由人颈的大小和弹簧的外直径推导得出.令al=bl=0.03m,au=bu=0.08m,Ti≥0表示绳子拉力不为负.优化后结果可表示为

3.1 最小平均值
最小平均值是指最小化区域W={(θs,θp)|θs∈[0,2π)且θp∈(0,π/9]}内T的平均值.因此,将W内T的平均值定义为目标函数:

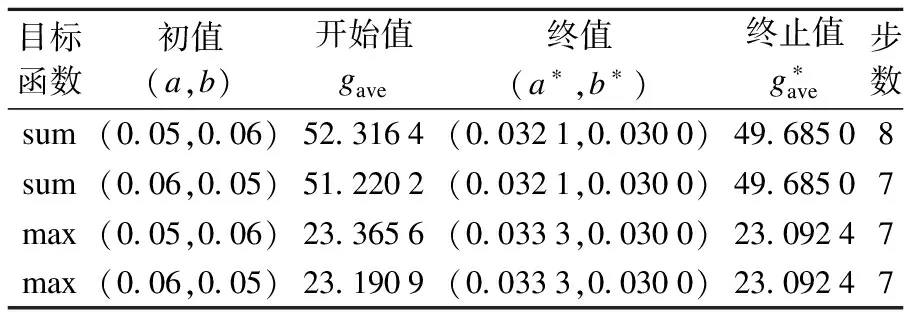
表2 最小平均值目标函数优化结果

3.2 最小-最大值Tmin-max
最小-最大值是指最小化区域W内T的最大值.因此,将W内T的最大值定义为目标函数:
由于难以得到gmax(a,b)的解析表达式,将θp和θs离散化并估测目标点的值,并通过密集离散化的方法得到gmax(a,b)的函数值.对应于上述2种目标函数,最小-最大值Tmin-max的优化结果如表3所示.从表3中可以看出,同一目标函数下,对应于不同的初始点,其优化结果基本相同.而对应于不同的目标函数,其优化结果不完全相同.
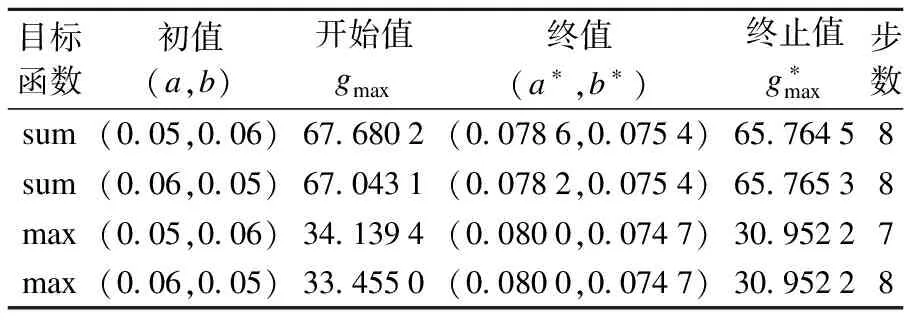
表3 最小-最大值目标函数优化结果

4 结语
本文对绳索驱动压缩弹簧支撑的柔性并联机器人的逆运动学进行了分析,解决了3根绳索驱动该机构的逆位置问题,并通过Matlab仿真验证了其数学模型的正确性.基于该机构逆位置和静力学分析,对3根绳子的布局进行了优化设计.研究结果表明,不同目标函数下优化结果不尽相同.若想使绳子的拉力平均值最小,最好使绳子端点靠近中心点处;若想使绳子的最大拉力最小,则最好使绳子端点远离中心点.本文分析方法将有助于进一步研究具有柔性脊柱的并联机构.研究成果对于复现人头颈的运动将起到重要参考作用,同时可促进仿人机器人和绳索驱动技术的发展.
)
[1] Gao Bingtuan,Xu Jing,Zhao Jianguo,et al. A humanoid neck system featuring low motion-noise[J].JournalofIntelligentandRoboticSystems,2012,67(2): 101-116.
[2] Gao Bingtuan,Xi Ning,Shen Yantao,et al. Development of a low motion-noise humanoid neck: statics analysis and experimental validation[C]//IEEEInternationalConferenceonRoboticsandAutomation. Anchoragr,USA,2010: 1203-1208.
[3] Gao Bingtuan,Xu Jing,Zhao Jianguo,et al. Combined inverse kinematic and static analysis and optimal design of a cable-driven mechanism with a spring spine[J].AdvancedRobotics,2012,26(8/9): 923-946.
[4] Rad C R,Stan S D,Balan R,et al. Forward kinematics and workspace analysis of a 3-RPS medical parallel robot[C]//IEEEInternationalConferenceonAutomationQualityandTesting. Cluj-Napoca,Romania,2010:301-306.
[5] 张波,战红春,赵明扬,等. 柔索驱动三自由度球面并联机构运动学与静力学研究[J]. 机器人,2003,25(3): 198-200,204.
Zhang Bo,Zhan Hongchun,Zhao Mingyang,et al. Kinematics and statics analysis of a 3-DOF sphere parallel wire driven mechanism[J].Robot,2003,25(3):198-200,204.(in Chinese)
[6] Hashimoto T,Hitramatsu S,Tsuji T,et al. Development of the face robot saya for rich facial expressions[C]//SICE-ICASEInternationalJointConference. Busan,Korea,2006:5423-5428.
[7] Beira R,Lopes M,Praga M,et al. Design of the robot-cub (iCub) head[C]//IEEEInternationalConferenceonRoboticsandAutomation. Orlando,USA,2006: 94-100.
[8] Nori F,Jamone L,Sandini G,et al. Accurate control of a human-like tendon-driven neck[C]//IEEEInternationalConferenceonHumanoidRobots. Pittsburgh,USA,2007:371-378.
[9] 宋伟刚.机器人学[M].北京:科学出版社,2007: 35-36.
[10] 程国采.四元数法及其应用[M]. 长沙:国防科技大学出版社,1991:24-28.
