仿真手术刀在虚拟手术系统中的应用
2013-12-23李珊珊丁明跃
罗 伟 李珊珊 丁明跃
1.长江大学附属第一医院,湖北荆州 434000;2.湖北省荆州市中心血站,湖北荆州 434000;3.华中科技大学生命科学院生物医学工程系,湖北武汉 431000
当前,虚拟仿真手术是虚拟现实技术在医学中的一项新的应用,也是世界各国研究热点问题之一[1-2],其是根据生物医学工程学的知识,使得医生能够真实地置身于计算机重建生成的“灵境”中,然后从仿真手术器械的使用着手,学习如何进行各种仿真手术和处理各种突发情况。如何正确使用手术刀进行手术是外科实习医生必备的训练课程。医生在执行手术时,离不开手术刀的操作。自2011年以来,经过长江大学附属第一医院研究人员的辛勤工作,建成了一个利用虚拟手术刀实现虚拟外科手术的系统平台,保证了进修医师和医学生可以重复进行各种常规操作训练,并得到专家手术指导,降低了手术的风险,节约了培训医生的费用,大大提升了教学的质量和效果。
1 仿真手术刀的研制
仿真手术刀的研制主要考虑了其在使用方式上与实际手术刀必须保持一致,训练的目的才能真正地实现。首先,常用的抓持手术刀方式,①琴弓式:琴弓式是最常用的一种执刀方式,动作范围广而灵活,用力涉及整个上肢,主要在腕部。用于较长的皮肤切口和腹直肌前鞘的切开等。②执笔式:用力轻柔,操作灵活准确,便于控制刀的动度,其动作和力量主要在手指。用于短小切口及精细手术,如解剖血管、神经及切开腹膜等。③握持式:全手握持刀柄,拇指与食指紧捏刀柄刻痕处,此法控刀比较稳定,操作的主要活动力点是肩关节。用于切割范围广、组织坚厚、用力较大的切开,如截肢、肌腱切开、较长的皮肤切口等。④反挑式:是执反挑式、笔式的一种转换形式,刀刃向上挑开,以免损伤深部组织,操作时先刺入,动点在手指。用于切开脓肿、血管、气管、胆总管或输尿管等空腔脏器,切断钳夹的组织或扩大皮肤切口等。⑤指压式:用力重,食指压住刀柄前端,后半端藏于手中,此法控刀稍不灵活。主要适用于难于切开的皮肤。本研究通过实际调查工作发现,医生大多采用琴弓式或握持式的抓持刀柄姿势,见图1。

图1 常用手术刀抓持方式
1.1 手术刀受力分析
琴弓式持手术刀,操作者的手指关节将感觉到来自手术刀反馈的切割力,接着手指将这一信息传递给操作者的大脑;同时人的眼睛感知到的手术刀位置和姿态情况也传入大脑。大脑将这两方面信息处理和融合,进一步控制医生的手臂和手腕协调动作。整个过程相关的因素主要包括:手臂的力角度、手的姿势、切割对象的生理特征、组织产生的阻力等[2]。见图2。
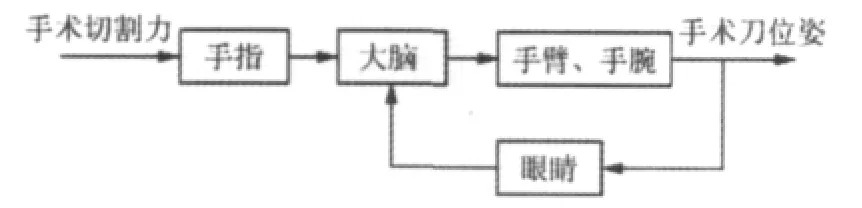
图2 手术时术者的反馈控制系统
1.2 手术刀构造
仿真手术刀研制成功与否关键在于尽可能地使其符合实际操作习惯,一手持刀柄,另一手用持针钳(持针器)夹住刀片,嵌入刀柄前端的凹处,再用持针钳(持针器)把刀片夹好即可使用。仿真手术刀没有一个固定的支点,因此它只能提供给手指一个反馈力。手臂上力的感知是通过视觉来收集反馈信息的,这样就可以弥补不足。实验表明,仿真手术刀确实能够提供给操作者一个身临其境的力反馈的真实触觉。
2 力反馈设备
2.1 力反馈设备选择
将手术刀的受力点与牵引钢丝相连,由步进电机-丝杠传动的驱动方式来拖动牵引钢丝。因为步进电机在额定载荷范围内启动和制动均平稳,控制十分简单方便,丝杠传动还可以进一步降低了机械的振动,保证了运动的直线精度值。当操作者手向上抬起产生拉力时,拉力就能及时地传递到食指,这样就给操作者带来了明显的力反馈感受[3-5]。
2.2 力反馈控制模型
力反馈装置采用两种力反馈控制策略。
2.2.1 基于位置的开环控制策略 基于位置的开环控制策略依据的是刀尖抬起的高度与示指感受到的切割力成正比这一特点。它的优点是模型直观、控制简单,但控制精度难于保证。
2.2.2 基于反馈力的闭环控制策略 由于模型相对复杂,而且需要添加拉力传感器,直接利用反馈力作为控制量,控制精度较高。因为手术操作是十分精细的,医生的力觉反馈尤为重要,稍有不慎就会酿成大祸。因此,既要使虚拟外科手术系统更加真实地模拟,又要求仿真手术刀连接的力反馈装置精度高。经过比较,本研究选择了基于反馈力的闭环控制策略对力反馈进行控制[5]。见图3。实验结果显示,通过4个步骤很真实地实现了切割反馈力变化情况。见图4。

图3 反馈力控制模型

图4 实际切割反馈力输出
3 虚拟手术系统环境的仿真
本研究构建了一个虚拟手术室,在虚拟手术台上设置了手术对象和手术场景中所有因素。系统将所有的图像信息投影到一个平放的屏幕上。受训者可以按照事先设定好的模型进行手术操作,通过仿真手术刀的操作,轻松实现在模型上的切割和练习。利用这些信息可直接调Open GL函数产生三角形面片,进而生成虚拟人体组织[3-4,6]。当“手术刀”在操作屏幕上滑动时,就留下了相应操作轨迹,并出现了划开的切口,同时又有相应的人体生理特征的显示配合生成,保证医生的手术逼真感,系统具备医学手术课程要求的内容,对于操作者会逐条进行操作提示和考核[7]。系统全部由VC编写,稳定快捷,对于各种操作系统平台均有很好地支持[8]。
4 结论
仿真手术刀的应用,大大降低了医生培训中存在的风险,节约了大量的医疗成本,提高了医生业务技术和操作水平,可以有效地缓解当前人体尸体教学标本日趋减少的问题,为医院今后开展各种新技术、新业务的预演讨论、可行性认证提供了新的途径[7-8]。相信通过研究者不懈努力,将逐步实现虚拟现实技术在医院临床医疗中开展相关测试和手术教学试验,将其应用于手术培训、手术预演、临床诊断、远程干预、医学辅助教学等各个环节,不远的将来,仿真手术刀会越来越完善,并且更多的手术器械会被模拟出来,为医生的培训教学工作和手术器械的研制提供大力支持和帮助。
志谢
本研究得到了华中科技大学生命科学院生物医学工程系丁明跃教授的指导和帮助。
[1]黎健伟,任义军,雷蕾,等.数字化三维重建技术在组织瓣临床解剖教学中的应用[J].山东医药,2009,49(8):15-17.
[2]周志永,韩勇,李文庆,等.虚拟海洋环境中碰撞检测的研究与实现[J].计算机技术与发展,2011,21(4):25-28.
[3]臧爱云,原魁.基于真实切割的虚拟手术中力觉模型建模方法研究[J].中国体视学与图像分析,2004,9(2):114-119.
[4]罗伟,田夫,李珊珊,等.虚拟现实技术在医学中的应用[J].中华医院管理杂志,2005,21(12):837-838.
[5]聂滨,曾照芳.基于虚拟现实技术的医学实验室的构建研究[J].西北医学教育,2006,14(1):11-13.
[6]Andries van D,Henry F,Sascha B,et al.Immersive Electronic Books for Teaching Surgical Procedures.Pre-I CAT CREST Symposium on Telecommunication,Teleimmersion,and Telexistence[D].Tokyo:The University of Tokyo,2002.
[7]陈新庚,马长生,孙文涛.基于Vega的导弹防御仿真系统研究[J].计算机仿真,2011,28(1):59-62.
[8]Shreiner D,Woo M,Neider J,et al.Open GL编程指南[M].4版.邓郑祥,译.北京:人民邮电出版社,2005:43-47.