应急响应中PixelGrid无人机遥感数据处理的关键技术与应用
2013-12-11艾海滨
贾 娇,艾海滨,张 力,燕 琴
(1.兰州交通大学,甘肃 兰州730070;2.中国测绘科学研究院,北京100830)
一、引 言
现今,在应急响应和防灾减灾领域,通过低空无人机获取灾区影像的方式发挥的作用越来越明显,其最大的优势就是可以在恶劣的自然条件下,或者在人无法到达的地区,利用简单条件就可以低空飞行,获取影像数据。同时,其也存在一个不容忽视的问题,即与传统的航空拍摄相比,应用小型无人机获取数据的方式受到气候因素、重量因素、相机质量因素等影响,导致飞机姿态不稳定,从而使得通过无人机获得的影像质量会有一些不足,如影像航向重叠度和旁向重叠度都不够规则、像幅较小、像片数量多、影像的倾角过大且倾斜方向没有规律、航摄区域地形起伏大造成的影像旋偏角大、影像有明显畸变等。这些情况下实现自动空三是现有数字摄影测量系统的主要挑战,在大多数情况下都将导致错误结果。
因此,完善的影像数据处理系统应该既能快速处理数量庞大的无人机影像,又能保证处理结果准确且满足既定的要求。本文以影像数据测图系统PixelGrid为平台,介绍了无人机影像数据快速处理的关键算法与相关技术,以及PixelGrid在应急响应处理中的应用。
二、摄影测量快速处理
针对无人机影像的特点对其进行数据快速处理的流程如图1所示。
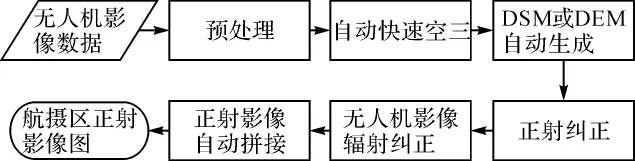
图1 无人机影像快速处理流程
获得无人机数据以后,首先对影像作旋转、主点修正、畸变改正或格式转换等预处理;然后再进行自动相对定向、模型连接、航带间转点等完成空中三角测量;最后利用特征提取技术从影像中提取数字表面模型(DSM),DSM经滤波处理得到DEM。下面对原始影像作匀光匀色处理,再结合生成的DEM对其进行数字微分纠正,然后利用正射影像自动拼接技术得到整个测区的正射影像图。
三、无人机影像处理的关键算法
传统摄影测量软件在进行相对定向之前要设定影像的航向重叠度,而低空无人机拍摄出的影像航向旁向重叠度都不规则,致使在金字塔影像最高层的搜索范围不正确。无人机影像也存在旋偏角过大的问题,传统的灰度匹配算法会使影像不相关。以上两个弊端导致了无人机影像的相对定向结果不理想。PixelGrid系统利用了SIFT算法进行匹配,并基于尺度/旋转不变性进行全自动相对定向[1],图2展示了在无人机影像旋偏角较大、纹理缺乏的情况下得到296个匹配点,σ值为1.12个像素,说明此方案的匹配成功率和匹配点精度都较高,能满足实际生产需求;得到相对定向元素以后,进行模型连接,并构成自由航带网[2]。无人飞行器存在影像畸变大、飞行状态不稳定等不足,致使模型连接的中误差超出限差过多。为了解决这个问题,首先在影像重叠区域提取Förstner特征,经过灰度匹配获得初始的模型连接点,再应用直方图统计法、模型连接比定义、几何相似关系法逐步去除匹配错误的点。此方法获得的连接点分布均匀,转点的成功率和可靠性高,为后续的航带间转点和区域网平差提供了保障。
完成自动空三解算后,利用原始影像和内外方位元素生成数字表面模型(DSM)或DEM。从遥感影像中自动提取三维信息的方法很多,它们能满足普遍的生产要求,但弊端是精度和可靠性不高[3]。针对受灾地区的复杂地况和无人机的非常规拍摄,可采用由粗到细(coarse-to-fine)的多级影像匹配策略[4],融合特征点、特征线和格网点,集成多种成熟的、性能互补的影像匹配算法(基于面元的匹配、基于特征的匹配和关系匹配等),同时自动进行匹配粗差定位和剔除,以保证匹配精度和可靠性。其核心算法为基于物方的多影像匹配方法[5],可以同时匹配多于2景的影像,可有效地解决重复纹理或遮挡区域的匹配困难。同时采用兼顾地形特征线信息的全局概率松弛法影像匹配算法[5-6],兼顾影像的全局和局部信息(如图3所示)。
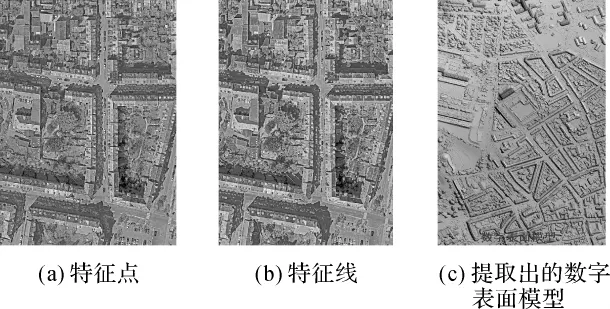
图3 基于多基线、多匹配特征的地形信息自动提取
由于拍摄相机和外部环境的影响,拼接后的影像容易出现色彩或灰度的差别。基于影像直方图匹配的匀色算法[7]将缩小一定程度拼接后的大影像作为参考模板,使原大影像灰度直方图变成规定形状的直方图而对图像色彩作修正,这样使得拼接的色调过渡平滑,也极大地提高了自动化程度。另外,采用适当调节影像的亮度和对比度属性的方法[7]来去除影像上的大面积雾霭,增强影像对比度,弥补了以往的匀光算法(如自适应模板法)[7]在此方面的缺陷。
为得到精确的DEM,要对色彩调整后的原始影像进行数字微分纠正以生成正射影像图。正射影像拼接需要做到无缝镶嵌、无影像错位,清晰准确地呈现测区的实际情况。可运用动态规划算法[8],根据多影像的整理分布情况自动生成区域范围内的接缝线网络,进行整体接缝线自动编辑,同时对接缝线进行实时的羽化处理,以保证镶嵌处理的效率。生成的拼接线能够绕开房屋、树木、桥梁等,而且一般不需要人工手动修改。
四、高效能处理技术
数字摄影测量软件可处理的数据量越来越大,在应急响应中越快获知灾区情况越好,为了提高效率,并行处理方式在数据处理中广泛应用起来。并行处理是计算机系统中同时执行多个处理机的一种计算方法,目的就是快速解决大型且复杂的计算问题。单机多核是最简单的一种并行方式,即一台计算机拥有多个内核,允许多个进程在一台机器上同时进行处理。经测试验证,一台8核PC机只需75 min即可完成856个像对UCXP航空影像的自动相对定向,200个像对用单机多核的方式只需3 h即可完成DSM的自动提取。
为了获得更优质的效率,还可以采取多机集群分布式的数据处理方法,即将局域网中互联的所有工作站(包括PC机和高性能集群计算机)通过软件的方式进行通信和协作,从而以一定的任务调度策略共同完成影像数据的分布式处理[9]。图4展示了PixelGrid系统的分布式处理架构,基于高速局域网络,基本上实现了基于松散耦合并行服务中间件的影像数据集群分布式并行计算[10]。当接到任务时,任务调度模块首先根据性能检测模块的报告,按照负载均衡的方式将待处理的任务发送到相应的处理节点上;然后操作员通过软件界面实时了解任务进展,接收远端处理完的成果数据,并在本机上储存该数据。影像正射纠正中涉及的重采样操作往往耗时巨大,在高数据处理量的系统中,采用分布式计算,将系统计算功能分块并行计算,可大大提高处理效率。
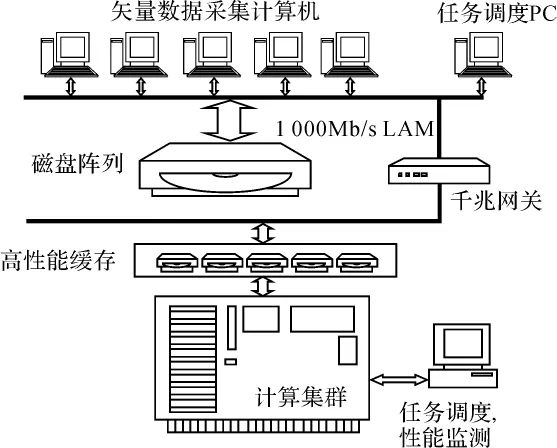
图4 PixelGrid系统分布式处理架构
在实际生产中,可以根据需要选择使用单机多核或者多机分布式处理。表1以匹配DSM为例比较了两种处理方式的效率,具体处理内容是从36张8 cm分辨率的UCD航空影像生成格网间隔为40 cm的DSM。由表1可知多机分布式并行处理比单机处理更能提高效率,减轻了人员的工作量,实现了作业步骤的高度自动化,为灾害的应急处理争取了时间。

表1 PixelGrid两种处理方式在匹配DSM中的效率对比
GPU技术以其卓越的图形处理功能,在数字摄影测量领域的应用越来越重要,根据其并行结构和硬件特点,使利用GPU实现通用计算和图像处理的高性能并行计算成为可能,并且发展成为趋势。对于一幅分辨率为0.2 m、大小为756 MB的正射影像,采用CPU纠正大约需要8 min,而基于FX1800显卡的GPU精纠正处理只需30 s,加速比为16倍。由于正射纠正是针对单个像元的操作,随着影像像元数的增多,计算量也急剧增加。PixelGrid系统利用OpenGL作为手段,修改三维绘制管线的可编程Vertex和 Fragment Shader来实现快速的纠正[11]。以21张UCD航空遥感影像(测区面积约73 km2,数据量9.2 GB)为例,利用单机单线程GPU处理模式生成分辨率为0.2 m的正射影像,在NVIDIA Quadro 4000显卡和1000转速SAS盘的机器上运行,只需要约8 min。通过GPU并行正射纠正的实例说明,
综上所述,PixelGrid在玉树地震后仅用了7个小时即完成了从自动空三到生成正射影像的全部流程,制作出玉树结古镇震后0.4 m分辨率的正射影像图,图5的正射影像显示出全镇的受灾情况,图6是结古镇震后2 m分辨率DSM彩色晕渲图。另外,对舟曲泥石流后近200幅无人机航空影像数据进行处理,从自动空三到正射影像制作完成共用近6 h,获得了0.2 m分辨率的舟曲县泥石流灾害影像图,如图7所示,能显示泥石流经过地区的受灾状况。这些成果可以帮助救灾人员判断受灾的具体区域和严重程度,为调派人力物力前往救助提供保障。另外,如图8所示,正射影像图也能为监测灾后地质形态(滑坡群、堰塞湖等)变化、关注受灾后城镇的恢复与重建提供保障。利用GPU对摄影测量中相关图像处理算法的并行化,可以极大地提高摄影测量处理的效率。

图5 结古镇震后正射影像图
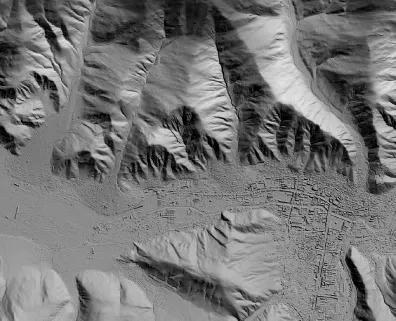
图6 结古镇震后DSM彩色晕渲图
由影像自动匹配生成的DSM包含地面建筑物、树木和桥梁等高度,需要转换为DEM以供后续流程应用。一般是靠单人手工编辑,耗费人力和时间巨大。为了提高效率,运用多人网络分布式DSM在线编辑系统,即由服务器端将一片测区分成若干块区,若干客户端在网络内同时进行DSM编辑,处理时间可成倍减少,为后续流程的顺利进行提供了方便。
五、应 用

图7 舟曲县泥石流正射影像图

图8 堰塞湖正射影像图
六、结束语
本文基于PixelGrid系统的数据处理流程和方法,针对低空无人机拍摄方式的现状,介绍了遥感影像快速处理技术的关键算法,详细阐述了并行计算技术与数字摄影测量相关算法相结合的模式,并通过PixelGrid在玉树地震和舟曲泥石流的灾后影像处理中的应用,验证了这两种技术相结合可以充分发挥应急响应中数据处理的速度和效率。
[1]王琳,张力,艾海滨.无人飞行器遥感影像的自动相对定向研究[J].测绘通报,2011(11):11-14.
[2]王琳.高精度、高可靠的无人机影像全自动相对定向及模型连接研究[D].北京:中国测绘科学研究院,2011.
[3]张力,张继贤.基于多基线影像匹配的高分辨率遥感影像DEM 的自动生成[J].测绘科学,2008,33(S2):35-39.
[4]袁修孝,明洋.一种综合利用像方和物方信息的多影像匹配方法[J].测绘学报,2009,38(3):216-222.
[5]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,2010:148-213.
[6]ZHANG Li,GRUEN A.Multi-image Matching for DSM Generation from IKONOSImagery[J].ISPRSJournal of Photogrammetry and Remote Sensing,2006,60(3):195-211.
[7]王邦松,艾海滨,安宏,等.航空影像色彩一致性处理算法研究[J].遥感信息,2011(1):45-49.
[8]CHON J,KIM H.Determination of the Optimal Seamlines in Image Mosaicking with the Dynamic Programming(DP)on the Converted Cost Space[J].Lecture Notes in Computer Science,2006(4029):750-757.
[9]王彦敏,卢刚.基于PixelGrid实现DOM的快速更新[C]∥地理信息与物联网论坛暨江苏省测绘学会2010年学术年会.无锡:江苏省测绘学会,2010.
[10]艾海滨,张剑清.基于中间件的高分辨率卫星影像正射纠正的分布式处理[J].测绘科学,2009,34(4):158-160.
[11]韩元利.基于GPU编程的虚拟自然环境技术研究[D].武汉:武汉大学,2007.
