“1+4”铝热连轧轧制力自学习
2013-12-05杨景明马凤艳车海军
杨景明 马凤艳 车海军 杜 楠
1.国家冷轧板带装备及工艺工程技术研究中心,秦皇岛,066004
2.燕山大学工业计算机控制工程河北省重点实验室,秦皇岛,066004
0 引言
在铝热连轧二级设定计算中,轧制力预设定计算精度直接影响其他工艺参数的预设定精度。然而,铝热连轧是一个相当复杂的过程,而且影响因素很多,导致轧制力预报总会存在误差。引起误差的原因可以归结为模型本身的误差、轧制设备测量误差、过程状态的变化等[1]。近年来为提高轧制力预报精度,人们将自学习应用到轧制力模型预报中,来适应复杂多变的轧制生产过程。
已有不少学者对轧制力模型的自学习进行了研究,采用的轧制力模型自学习方法一共有两种形式:一种形式是以传统变形抗力机理模型中的某个系数作为轧制力自学习参数[2],另一种形式是直接在轧制力模型中加入自学习参数[3]。由于本文中采用的变形抗力模型是根据现场数据利用最小二乘支持向量机反向建模得到的,没有具体的模型系数能够作为自学习参数,所以本文采用第二种自学习方法,即直接在轧制力模型中加入自学习参数。
1 轧制过程相关数学模型的选取
轧制过程数学模型是实现铝板带轧制生产过程的基础,是轧制规程设定计算的核心部分,模型的计算精度直接影响预测结果的准确性。
1.1 轧制力模型基本公式
轧制力模型是铝热连轧轧制过程所有数学模型中最重要的综合模型。本文采用广泛应用的SIMS公式的热连轧轧制力模型[4]:

式中,F为轧制力,kN;l'c为考虑压扁后的接触弧长,mm;Qp为外摩擦应力状态系数;B为板宽,m;K=1.15δ,MPa,其中δ为变形抗力;λ为影响系数;γ为变形区中性角,rad;α 为咬入角,rad;τf、τb分别为前后张应力,MPa。
Qp采用 Ford-alexander公式:

式中,hm为平均变形厚度;ε为变形程度;H为来料厚度;hi为各机架出口厚度。
1.2 变形抗力模型
变形抗力是由于金属材料受到外力施压而产生的塑性变形的抵抗能力。变形抗力是轧制力计算公式中的重要材料参数,变形抗力模型涉及较多轧制变量和参数,如轧制温度、变形速度和变形程度等,传统的机理模型计算的变形抗力难以适用于复杂多变的铝热连轧生产过程。本文采用的变形抗力模型是根据某铝厂大量现场轧制数据进行反向建模得到的,采用的反向建模方法是最小二乘支持向量机。本文反向建模中的输入自变量如下:轧制温度t,℃;入口厚度H,mm;出口厚度h,mm;平均变形速率 um,s-1。输出变量为:变形抗力δ,δ为变形抗力,MPa。实践证明,利用最小二乘支持向量机反向建模得到的变形抗力模型计算精度较高,适用于现场实际。
本文重在研究自学习方法,因此不详细介绍变形抗力模型的建立。
1.3 温度模型
温度是铝热连轧生产中重要的工艺参数之一。温度直接影响变形抗力的计算,进而影响轧制力的预报精度。温度也直接影响产品的组织和性能以及表面质量。
由于某轧制现场只有精轧入口和出口处有测温仪,所以只能得到第1、第4机架的轧制温度。第2、第3机架的轧制温度需用温降模型计算。本文选用精轧机组简化温降模型[4]:

式中,i为机架号;tw为喷水水温,℃;Ka为综合对流冷却系数;Lj为第j机架到第j+1机架的距离;hn为末机架出口厚度,mm;vn为末机架出口速度,m/s;tFTO为来料入口温度,℃。
Ka可利用现场实测的tFTO和终轧温度tFC反推得到,反推公式如下:

2 轧制力模型自学习
2.1 自学习算法
在轧制力模型中添加自学习参数有两种形式[5]:加法形式和乘法形式,本文采用乘法形式[6]:

式中,Fy为由规程设定计算出的轧制力预测值;β(t)为当前轧制铝带的自学习系数;β(t-1)为上卷轧制铝带的自学习系数;ξ为任意给定的增益系数,0≤ξ≤1;Fa为轧制力实测值;Fma为用现场实测值计算的模型输出值。
2.2 自学习验证与仿真
与其他3个机架相比,第4机架的轧制力预测精度对铝板带产品质量影响最为重要,所以本文选用现场1000卷5052铝合金轧制数据,再从上述每卷轧制数据中选取4个稳定点,以第4机架为例,对轧制力模型自学习进行研究。表1中给出了1000卷中的5卷与第4机架相关的实测数据。对第4机架的轧制力模型自学习在MATLAB环境下进行仿真和验证,其中自学习增益系数ξ=0.4,仿真结果如图1和图2所示。

表1 第4机架轧制相关数据
将图1、图2对比,可以看出加入自学习后的轧制力预报精度明显提高。图1、图2中误差带是±10%。

图1 加入自学习前的轧制力预测

图2 加入自学习后的轧制力预测
2.3 自学习算法优化
传统的自学习中的增益系数ξ是任意给定的常量,导致轧制力的预报精度具有随机性。当增益系数ξ过小时,轧制力自学习速度太慢,不能适应现场较快的变化;当增益系数ξ过大时,容易发生过学习。针对上述问题,本文用细菌觅食优化算法对增益系数ξ进行优化,获得了使预报精度达到最高值的增益系数ξ。
2.3.1细菌觅食优化算法原理与流程图
随着群智能优化算法的蓬勃发展,Passino[7-9]在2002年提出了模拟人类大肠杆菌觅食行为的细菌觅食优化算法(bacterial foraging optimization,BFO)。该算法具有群体智能算法的并行搜索、易跳出局部极小值等优点,成为生物启发式计算研究领域的又一热点[10]。该算法已被应用于液位控制系统的自适应控制[11]、决策系统设计中的任务类型[12]以及控制器参数整定[13-14]。
该算法对大肠杆菌觅食行为的模拟主要包括趋向性操作、复制操作、迁徙操作。
(1)趋向性操作(chemotaxis)。趋向性操作使得细菌觅食优化算法具有局部开采能力,它决定算法的前进方向以及在某一个区域搜索的详细程度等,是算法的核心操作,也是设计算法时需要重点考虑的部分。
(2)复制操作(reproduction)。生物进化过程的规律是优胜劣汰。经过一段时间的食物搜索过程后,部分寻找食物能力弱的细菌会被自然淘汰掉,为了维持种群规模,剩余的细菌会进行繁殖。在细菌觅食优化算法中模拟这种现象称为复制行为。
复制操作是根据达尔文进化论,淘汰生存能力弱的细菌,保存生存能力强的细菌,用于繁殖下一代,即让优质的细菌个体引导整个种群的繁衍,从而提高全局收敛性和计算效率。
(3)迁徙操作(elimination and dispersal)。细菌个体生活的局部区域可能会突然发生变化(如温度的突然升高)或者逐渐变化(如食物的消耗),这样可能会导致生活在这个局部区域的细菌种群集体死亡,或者集体迁徙到一个新的局部区域。在细菌觅食优化算法中模拟这种现象称为迁徙行为。
细菌觅食优化算法的迁徙操作使得细菌具有随机搜索的能力,有助于算法保持种群的稳定性和多样性,跳出局部最优解,减少早熟收敛的情况。
设Nc、Nre、Ned分别是趋向性、复制和迁徙操作的执行次数,j、k、l分别是对这3种操作的计数参数,初始时j=0,k=0,l=0,则细菌觅食优化算法的流程图如图3所示。

图3 细菌觅食优化算法流程图
2.3.2细菌觅食优化算法优化增益系数
本文的目标函数取第4机架轧制力误差绝对值的最小值:

式中,m为样本号;n为样本数;Fcm为第m个样本现场实测轧制力;Fym为第m个样本模型预测轧制力。
为了选取增益系数的最优值,用细菌觅食优化算法对自学习算法中的增益系数进行优化。优化前,先随机赋给增益系数几组值,求出相对应的目标函数值即误差绝对值,用来与优化后的目标函数值进行对比,结果如表2所示。本文细菌觅食优化算法各参数选择如下:初始细菌的个数N取50;趋向性操作的次数Nc取20;细菌最大游动步长Ns取4;复制操作的执行次数Nre取4;迁徙操作的执行次数Ned取2;迁徙概率Ped取0.25;游动步长C取0.01。细菌的搜索范围为增益系数ξ∈[0,1]。

表2 与增益系数相对应的误差值
仿真试验得到的优化结果为:增益系数ξ=0.57,目标函数J=92.86。将优化后的增益系数结果用于轧制力预报,仿真图如图4所示。
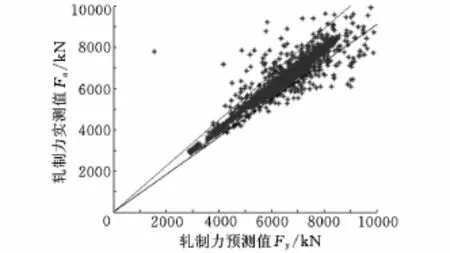
图4 增益系数优化后的轧制力预测
由图4和图2可以看出,两图中的轧制力误差基本都落在±10%的误差范围内,而且增益系数优化后,轧制力预报精度得到明显提高。
3 结语
本文根据大量的现场实测数据,对轧制力自学习进行了研究,并用细菌觅食优化算法自学习算法中的增益系数进行了优化。对自学习和优化结果进行了仿真,仿真结果显示,加入自学习后的轧制力预报精度得到了明显提高,并且预测误差都在现场允许的±10%的误差范围内,为现场下一步的二级设定计算奠定了良好的基础。
[1]窦富萍.五机架冷连轧轧制规程优化设计及模型自学习研究[D].秦皇岛:燕山大学,2007.
[2]祝夫文,胡贤磊,赵忠,等.中厚板生产的高精度轧制力短期自学习[J].东北大学学报(自然科学版),2008,29(7):980-983.Zhu Fuwen,Hu Xianlei,Zhao Zhong,et al.High Precision Short- Term Self-Learning of Rolling Force in Plate Rolling Process[J].Journal of Northeastern University(Natural Science),2008,29(7):980-983.
[3]宋勇,苏岚,荆丰伟,等.热轧带钢轧制力模型自学习算法优化[J].北京科技大学学报,2010,32(6):802-806.Song Yong,Su Lan,Jing Fengwei,et al.Self-learning Algorithm Optimization for the Rolling Force Model of Hot Strips[J].Journal of University of Science and Technology Beijing,2010,32(6):802-806.
[4]孙一康.带钢热连轧的模型与控制[M].北京:冶金工业出版社,2002.
[5]田野.热轧带钢粗轧过程控制与模型的研究与应用[D].沈阳:东北大学,2008.
[6]Lee D,Lee Y.Application of Neural-network for Improving Accuracy of Roll-force Model in Hot-rolling Mill[J].Control Engineering Practice,2002,10(4):473-478.
[7]Berg H C,Brown D A.Chemo Taxis in Escherichia Coil Analyzed by Three-dimensionaltracking[J].Nature,1972,239:500-504.
[8]Lowe G,Meister M,Berg H.Rapid Rotation of Flagella Bundles in Swimming Bacteria[J].Nature,1987,325:637-640.
[9]Liu Y,Passino K M.Bio-mimicry of Social Foraging Bacteria for Distributed Optimization:Models,Principles and Emergent Behaviors[J].Journal of Optimization Theory and Applications,2002,115(3):603-628.
[10]雷秀娟.群智能优化算法及其应用[M].北京:科学出版社,2012.
[11]Andrews B W,Passino K M,Waite T A.Foraging Theory for Decision Making System Design:Tasktype Choice[C]//43rd IEEE Conference on Decision and Control.Bahamas,2004:4740-4745.
[12]Andrews B W,Passino K M,Waite T A.Foraging Theory for Decision Making System Design:Task Processing-length Choice[J].Submitted IEEE Control Systems Magazine,2004.
[13]Dong H K,Jae H C.A Biologically Inspired Intelligent PID Controller Tuning for AVR Systems[J].International Journal of Control,Automation and Systems,2006,4(5):624-636.
[14]Dong H K,Jae H C.Adaptive Tuning of PID Controller for Multivariable Systems Using Bacterial Foraging Based Optimization[J].Advances in Web Intelligence Lecture Notes in Computer Science,2005,3528:231-235.
