集思宝G330手持全球定位系统接收机在林区单点定位的精度分析
2013-12-05冯晓娜徐文兵汤孟平吴广正
冯晓娜,徐文兵,汤孟平,吴广正
(浙江农林大学 环境与资源学院,浙江 临安 311300)
森林资源规划设计调查(简称 “二类调查”)是森林经营单位为掌握森林资源现状及动态,分析与评价经营活动的效果,编制、修订森林经营方案或总体设计而进行的森林资源清查[1]。传统调查方法主要是用罗盘仪和百米尺做闭合导线[2]或罗盘仪视距法配合皮尺来测定标准地和树高等[3]。罗盘仪定位精度只能达到 50 m,费时费力强度高[4]。现今,天然林区的森林经营从过去的生产经营型转变为生态保护型,以及精准林业[5]的发展和相关学术研究等都对林业调查手段提出更高的要求,“3S”技术(地理信息系统、卫星遥感技术、全球定位技术)、三维激光扫描仪和全站仪等新技术的应用,促进了国内外森林资源调查的总体发展趋势不断向精度高、速度快、成本低和连续性的方向发展[6]。其中全球定位系统(GPS)能实时提供三维坐标,在林业调查中得到广泛应用。GPS技术不同作业方式在林业测量中都已有相关应用研究[7-11],但由于受地形条件和树冠遮挡的影响,尤其是山谷中空间视场小等难以克服的因素,定位精度只能达到米级甚至无法定位,局限了GPS技术在树木精密定位中的应用,只能满足林区面积测量、固定样地的复位调查和像控点的测定等[12-13]。手持式GPS接收机由于其体积小巧、携带方便、操作简单、价格低廉以及功能多样等优势,已被广泛应用于森林资源调查与检测中的样地选点定位、境界线的勘定、求取林地的距离和面积、森林病虫害飞防定位及飞播造林等方面[12-14]。自2000年5月美国取消可选择利用政策后,手持式GPS接收机单点定位精度有了很大的提高,单点定位精度可达到±15 m[13],若采取GPS差分技术处理,精度可达到1~5 m[15]。由于观测条件的复杂多变,尤其林区环境中,受手持GPS接收机设备的性能和复杂的地形条件的双重局限,直接影响了GPS测量的定位精度及其在林业测量中的应用。许多学者利用不同型号手持GPS接收机采用不同的数据处理方式来提高其定位精度[4,12-13],但数据处理过程比较繁琐。本研究采用合众思壮公司的集思宝G330手持式GPS接收机,以浙江省天目山国家级自然保护区为例,通过多历元的观测数据,主要研究消除系统偏差和同步观测差分的方式,提高手持式GPS接收机的单点定位精度,促进手持式GPS接收机服务于林业测量工作向定量化、数字化、精准化方向发展。
1 仪器设备与实验场地
1.1 实验仪器设备
1.1.1 手持式GPS接收机 集思宝G330手持式 GPS接收机,有 16个接受通道(L1,C/A码),内置GPS天线,可以直接采集点、线、面等GIS空间数据。仪器标称精度:单点定位精度,平面坐标中误差2D RMS(2 dimension root mean square)<3.0~5.0 m,采用差分(MSAS/WAAS/EGNOS)时<1.0~3.0 m。同时,由于接收引擎采用Super Sense技术,使得它在林业测量中搜星定位速度更快。
1.1.2 GPS-RTK(Real Time Kinematic)接收机 Trimble 5700/5800 GPS接收机是由美国Trimble公司生产的全集成GPS接收机,采用内置Trimble Maxwell 4芯片的超跟踪技术。
Trimble 5700接收机采用有效的低角度卫星跟踪技术、多路径抑制技术,12通道,L1 C/A码、L1全载波、WASS/EGNOS多重观测值,标称精度:码差分定位,水平中误差为±(0.25×103+1×10-6·D)mm(D为单位是km时水平距离的数值),垂直中误差为(0.5×103+1×10-6·D)mm;静态和快速静态测量,水平误差为(5+0.5×10-6·D)mm,垂直误差为±(5+1×10-6·D)mm,用于建立基准站。
Trimble 5800 GPS接收机,24通道,L1C/A码,L1/L2全周载波相位观测量,高精度的L1/L2多重相关伪距观测值,内置蓝牙(bluetooth),电子控制单元(ACU)控制器操作简便,标称精度:码差分GPS 定位,水平误差为±(0.25×103+1×10-6·D)mm,垂直误差为±(0.5×103+1×10-6·D)mm;实时动态,水平误差为±(10+1×10-6·D)mm,垂直误差为±(20+1×10-6·D)mm,用于流动站。
1.1.3 全站仪 全站仪(total station)是集测距仪、电子经纬仪、微处理机于一体的电子测绘仪器,使用方便、效率好、精度高,可直接测量角度、距离和坐标,还具有双边测量、悬高测量等特殊测量功能,已成为工程测量中常用仪器。本实验采用南方全站仪NTS362R,测角精度为2″级,单棱镜测程为2.6 km,免棱镜模式测程为 300.0 m,测距精度为±(3+2×10-6·D)mm。
1.2 实验场地
实验场地在浙江省天目山国家级自然保护区,位于浙江西北部临安市西天目山,30°18′30″~30°24′55″N,119°23′47″~119°28′27″E,海拔 300.0~1 556.0 m,距杭州 84.0 km,其东南部与临安市西天目乡毗邻,西部与临安市千洪乡和安徽省宁国市接壤,北部与浙江安吉龙王山省级自然保护区交界,是中国东部中亚热带北缘森林的代表性地段[16],森林资源保护良好。试验点布设于自然保护区入口处的狭长山谷地带,三面环山,除了周围山体和高大乔木的阻隔,每个点位正上方为不同范围大小的净空。
2 试验方法与数据采集
2.1 试验点布设
在测区内选择分布较均匀、远离电磁干扰源且视野较开阔的41个试验点,用钢钉做点标志。其中,J1,J2,J3,J4构成四边形闭合导线(图1)。

图1 闭合导线四边形Figure1 Parallogram of closed traverse
2.2 独立坐标系统的建立和改正参数的确定
在测区中布设J1,J2,J3,J4等4个试验点构成四边形闭合导线;利用全站仪观测闭合导线的距离及其内角,盘左、盘右各观测1次,取其均值;选择任意点架设基站,利用GPS-RTK仪器,设置BJ54椭球和120°E中央子午线,分别测出 J1,J2,J3,J4点的平面直角坐标;根据坐标 J1(x1,y1),J2(x2,y2),计算出方位角 α12;将 J1(x1,y1,H1)点设为起算坐标,方位角α12设为起始方位,自定义独立坐标系统;利用全站仪测定的导线观测数据,结合起算数据,分别推算出J2,J3,J4点的三维坐标,由于导线边长较短,高程测量采用对向三角高程测量,不考虑两差(地球曲率影响和大气折光影响)改正;利用全站仪测定的坐标与RTK同名点进行点校正,这里的点校正不再是坐标系的转换,而是利用全站仪测定的结果对RTK测量数据进行约束纠正。
2.3 参考数据的测定
将GPS-RTK移动站利用对中杆在试验点上静置,得到固定解,待仪器的内符合精度符合要求(平面精度≤15 mm,高程精度≤20 mm),保存数据,作为试验的参考数据。
2.4 集思宝G330手持GPS单点定位
首先设置手持式GPS接收机的坐标系统,采用BJ54椭球和120°E中央子午线。接着设置手持式GPS接收机的坐标系统转换参数(Δx,Δy,Δz,ΔF,ΔA):Δx,Δy,Δz等 3个参数表示WGS84地心坐标系与独立坐标系的三维空间坐标系的3个坐标向量之差,分别设置为0;ΔA表示2个椭球体的长半轴之差,ΔF表示2个椭球体的扁率之差,分别为 ΔA=-108.0 m和 ΔF=+0.000 000 481。本实验中也设置为0。将手持式 GPS接收机朝向正北,相位中心对准各个试验点静置,进行多历元单点定位,待数据显示比较稳定后,时间间隔为2 min记录1次数据。观测时,1台接收机静置J1点连续观测,另有3台接收机分别静置其他试验点同步观测,每个点上观测10个历元,历时20 min左右,整个观测时间段为 8∶46-11∶24和 14∶26-17∶18的观测,获取各个试验点多历元的观测值。
3 数据处理方法
3.1 全站仪导线数据推算
全站仪野外观测数据按照闭合导线和闭合水准路线的模式解算各点的三位坐标[17]。根据RTK测定的 J1(x1,y1,H1)和 J2(x2,y2,H2),推算直线 J1J2方位角以 J1(x1,y1,H1)和 α12为起算数据,对转折角进行平差后推算其他边方位角,再由实测导线边距离推算各边坐标增量(Δxij=Dij·cosαij,Δyij=Dij·sinαij),进行平差后各点平面坐标(xj=xi+Δx′,yj=yi+Δy′)ijij;高差数据由对向观测的三角高程测量结果求平均值进行平差,根据Hj=Hi+h′ij计算各点高程。
3.2 手持GPS数据预处理和平均值计算
将手持GPS观测数据录入Excel表中,分析一组坐标值的分布特点,检查并纠正录入错误,同时剔除偏差明显较大的数据,保证数据的真实性与有效性(一般认为当系统误差消除后的残差为随机误差,但观测值的残差如果大于仪器标准精度2倍,一般认为是粗差,应予以剔除)。预处理后的数据按式(1)计算各个试验点在时长为20 min的平均坐标值

式(1)中:(xin,yin,Hin)为第i个试验点第n个的观测值;n为有效观测值个数。
3.3 不同时间段单点定位精度分析
不同时间段,同一点上空的GPS星座分布状况不断变化,GPS卫星分布图形直接影响单点定位精度。本试验在J1点上不同时间段连续观测,获得167条观测数据,将其分为3个时间段:上午(8∶46-9∶46),中午(11∶00-11∶24,14∶26-15∶00),傍晚(16∶18-17∶18),按式(2)计算全天观测数据的平均值作为参考值,按式(3)计算不同时间段各历元平面点位偏差值,分析不同时间段对单点定位精度的影响。

式(3)中:i为历元数,i=1,2,3,…,167。
3.4 内符合精度分析
内符合精度是表示手持式GPS接收机获得各个试验点多历元坐标值的离散程度,可反映接收机单点定位的稳定性,是评价接收机单点定位的主要精度指标,某试验点的内符合精度可按式(4)计算。

式(4)中:xi,yi,Hi(i=1,2,…,n)为各试验点的测量值,n为历元数;m 为中误差。
3.5 手持GPS数据的系统性偏差分析
由于手持GPS接收机只设定参考椭球,单点定位试验数据与GPS-RTK数据之间会产生系统性偏差。按式(5)求取多历元手持GPS观测数据平均值与GPS-RTK数据进行求差,分析差值的分布,若差值相近,按式(6)计算差值的平均值作为系统性偏差,按式(7)计算消除系统性偏差后手持GPS观测值离散性偏差,可分析手持GPS利用已知点坐标差分后单点定位的随机性误差。

式(5)和式(6)中:(xi0,yi0,Hi0)为第 i个试验点 GPS-RTK 观测值;n为试验点个数。
3.6 外符合精度分析
外符合精度是表示手持GPS单点定位的各个试验点测量值与参考值(本研究为GPS-RTK测量值)相比较的离散程度,是评价接收机的外部精度。为客观评价其外部精度,手持GPS测量值应消除其系统性偏差,某试验点的外符合精度m′可按式(8)计算,式中符号意义同式(4)和式(5)。

3.7 同步观测差分后的定位精度分析
试验中,一台手持GPS接收机静置J1点连续观测,将所有GPS数据按照不同时间段进行分组,同时以 J1点各个时段的随机误差(△x1i,△y1i,△H1i)作为修正值,如式(9)。对相同时间段的第 j个试验点的坐标值(xji,yji,Hji)进行修正,如式(10)。比较修正后的第j试验点坐标值与GPS-RTK参考值之间的差异(△xji,△yji,△Hji),如式(11),分析手持 GPS同步观测差分后的定位精度。

式(9),式(10)和式(11)中:i为时间段数;j为各试验点号,j=2,3,4,…,41。
4 研究结果分析
4.1 不同时间段对单点定位精度的影响分析
由式(2)和式(3),计算不同时间段J1点的综合误差,其结果如图2所示。
由图2可知:手持GPS接收机在不同测量时段进行单点定位时,98.8%的平面偏差小于4.0 m,上午和下午2个时间段的平面精度相近,中午时间段误差较大,不同时间段对测量精度的影响不显著。由于同一地域不同时间段内卫星的数量和分布位置会有所不同,这种差异性对定位精度产生不同程度的影响,利用手持GPS在林地测量中不考虑地形因素时,尽量避免中午时间段观测,以提高整体观测数据的质量。
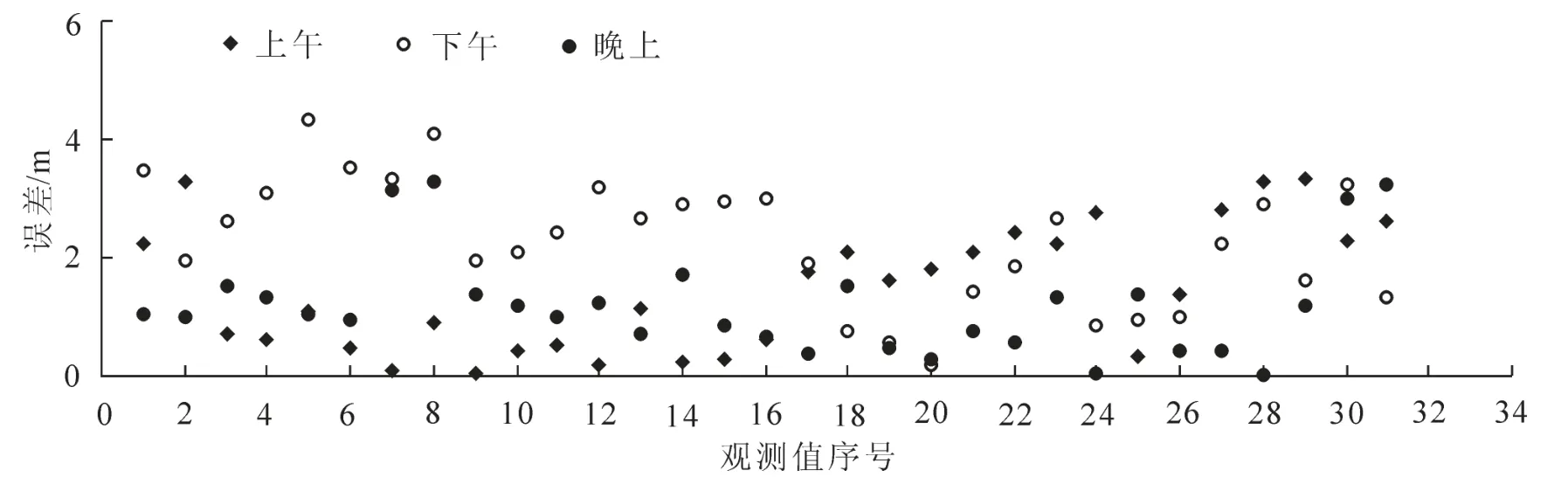
图2 不同时间段J1点的平面偏差Figure 2 Plane deviation in different time about point J1
4.2 内符合精度分析
由式(4)计算各个试验点坐标的中误差,即三维坐标的内符合精度(mx,my,mH),结果如图3。
由图3可知:90.0%的试验点平面坐标(x,y)的内符合精度小于4.0 m,而高程H只有67.5%,但85.0%的高程内符合精度小于6.0 m,相对精度能满足粗泛式林业测量的精度要求;高程数据的离散程度明显高于平面数据,个别高程数据出现跳跃现象,稳定性较差。

图3 手持GPS单点定位内符合精度分析Figure 3 Analysis of the inner precision of single point positioning using handheld GPS
4.3 单点定位系统性偏差分析
由式(5)~(7),得到试验点(x,y,H)的系统性偏差分别为(-59.406,72.435,103.610 m)。经分析,产生系统性偏差原因主要有2个方面:一是手持式GPS原始坐标为WGS84坐标,转换为BJ54坐标的椭球参数偏差和坐标转换误差;二是手持式GPS在单点绝对定位时,由于卫星轨道、星历误差、信号传播误差等共性误差的综合影响。消除系统性偏差后,即为各试验点的随机性偏差,分布情况如表1。

表1 消除系统性偏差后试验点随机性偏差分布情况表Table 1 Distribution table of the test points’random deviation after eliminating systematic bias
由表1可知:消除系统性偏差后的观测值精度有显著提高,与参考值相比较,(x,y,H)随机性偏差小于5.0 m分别为87.5%,95.0%和67.5%,其中平面坐标中0~3.0 m超过75.0%,高程只有32.5%,平面坐标精度高于高程的精度,整体情况与内符合精度相当,因此消除系统性偏差后手持GPS单点定位精度显著提高。
4.4 外符合精度分析
由式(8)计算各个试验点的外符合精度(m′,m′,m′xyH),结果如图4。由图4可得:85.0%~90.0%的试验点平面坐标外符合精度小于5.0 m,而高程只有48.7%,同时87.2%的高程外符合精度小于10.0 m,平面坐标的最大偏差为11.2 m,高程的最大偏差为19.5 m,与图3对比,外符合精度低于内符合精度,即手持GPS相对精度高于绝对定位精度,因此手持GPS单点定位还难以应用于测定林业样地,可用于样地复位,而在林地面积、边界线长度等相对测量中精度要高于单点定位。

图4 手持GPS单点定位外符合精度分析Figure 4 Analysis of the outer precision of single point positioning using handheld GPS
4.5 手持GPS同步观测差分的精度分析
由式(9)~(11),各个试验点观测值以其相近时段的J1点的误差进行修正(差分),再与实时动态参考值求差,同时以消除系统性偏差后(差分前)的坐标值与实时动态参考值求差,比较结果如图5~7所示。

图5 各个试验点的x坐标值差分前后随机误差相比较Figure 5 Comparison of the random error of x coordinates before and after difference

图6 各个试验点的y坐标值差分前后随机误差相比较Figure 6 Comparison of the random error of y coordinates before and after difference

图7 各个试验点的H坐标值差分前后随机误差相比较Figure 7 Comparison of the random error of H coordinates before and after difference
由图5~7可得:2种提高手持GPS观测精度方式的结果相比较,部分x坐标值精度有明显提高,整体而言没有明显变化,0~5.0 m的误差比例相同,为87.2%;y坐标值0~3.0 m的误差比例由修正前的74.4%提高到修正后的89.7%,0~5.0 m的误差比例相同;H坐标值0~3.0 m的误差比例在修正前后分别为30.8%和48.7%,0~5.0 m的分别为66.7%和79.6%。可见同一时间段共性误差包括系统性偏差相近,同步观测差分方法优于消除系统性偏差的方法,因此在林区使用手持GPS单点定位时,利用测区内已知点和2台以上的手持GPS接收机同步观测,可有效改善单点定位精度。同时,从图5~7中可见中间时段(即中午时段)修正效果明显低于两端时段 。
5 结论与讨论
本研究在林区环境中相对空旷的区域布设多个试验点,通对多台手持GPS接收机对试验点进行多历元的观测,并以GPS-RTK测量值作为参考数据,从不同角度进行分析数据,得到以下结论:①手持式GPS不同时间段定位精度相近,98.8%的平面精度优于4.0 m,中午时间段精度较差;②集思宝G330手持式GPS接收机单点定位精度较高,90.0%的试验点平面内符合精度小于4.0 m,85.0%~90.0%的试验点外符合精度一般小于6.0 m,高程精度低于平面精度,在林区测量,不考虑树林或山谷中等恶劣地形,定位精度与仪器标称精度相当;③手持式GPS测量的系统性偏差远大于其随机性偏差,在绝对定位中需要消除,系统性误差可利用测区中已知控制点予以修正。本研究中消除试验点(x,y,H)的系统性偏差(-59.406,72.435,103.610 m)后,各坐标分量随机性偏差小于 5.0 m分别提高到87.5%,95.0%和67.5%;利用测区内已知点和2台以上手持GPS接收机同步观测能有效削弱共性误差,定位精度的提高效果优于系统性偏差修正。
本研究采用的是集思宝G330手持式GPS接收机,其他型号的手持GPS未进行尝试;研究是在夏季进行的,其他季节或不同气候条件的影响未作充分考虑。研究结果分析显示,部分点位情况差异性较大,主要是受不同点位的微地形环境影响。本研究未采用针对性措施,只分析了整体性情况;又由于手持GPS在林业生产中应用广泛,因此本研究主要考虑林区环境的影响,下一步研究工作可试验集思宝G330手持式GPS接收机在平原地区的定位精度情况。
[1]凌小惠,刘悦翠,王锐.基于“3S”技术的延川县森林资源调查数据的动态分析[J].西北林学院学报,2009,24(4)∶37-40.LING Xiaohui,LIU Yuecui,WANG Rui.Dynamic analysis to inventory data of forest resource in Yanchuan County based on"3S"technology[J].J Northwest For Univ,2009,24(4):37-40.
[2]杨东.GPS在三类调查中的应用[J].黑龙江生态工程职业学院学报,2006,19(6):36.YANG Dong.Application of GPS in forest inventory for designing[J].J Heilongjiang Vocat Ins Ecol Eng,2006,19(6):36.
[3]梁长秀,韩光瞬,冯仲科,等.罗盘导线定位及其精度分析[J].北京林业大学学报,2005,27(2):182-186.LIANG Changxiu,HAN Guangshun,FENG Zhongke,et al.The positioning and precision analysis of compass tra-verse[J].J Beijing For Univ,2005,27(2):182-186.
[4]李崇贵.手持式GPS接收机在林区定位的稳定性研究[J].深圳职业技术学院学报,2003(1):6-10.LI Chonggui. Study on the stability of hand-held GPS receiver for positioning in forest region[J]. J Shenzhen Polytech,2003(1):6-10.
[5]冯仲科,张晓勤.发展我国的数字林业体系[J].北京林业大学学报,2000,22(5):102-103.FENG Zhongke,ZHANG Xiaoqin.Development of digital forestry system in China[J].J Beijing For Univ,2000,22(5):102-103.
[6]徐文兵,高飞,杜华强.几种测量方法在森林资源调查中的应用与精度分析[J].浙江林学院学报,2009,26(1):132-136.XU Wenbing,GAO Fei,DU Huaqiang. Application and precision analysis of several surveying methods in forestry resources survey[J].J Zhejiang For Coll,2009,26(1):132-136.
[7]冯仲科,南永天,刘月苏,等.RTD GPS用于森林资源固定样地调查的研究[J].林业资源管理,2000(1):50-53.FENG Zhongke,NAN Yongtian,LIU Yuesu,et al.RTD GPS for forest fixed sample plot investigation research[J].For Resour Manage,2000(1):50-53.
[8]张彦林,马俊吉,冯仲科,等.精准测定技术在固定样地复位调查中的应用[J].北京林业大学学报,2007,29(增刊 2):70-73.ZHANG Yanlin,MA Junji,FENG Zhongke,et al. Precision measuring technology in fixed plots reset survey application[J].J Beijing For Univ,2007,29(supp 2):70-73.
[9]车腾腾,冯益明,吴春争.“3S”技术在精准林业中的应用[J].绿色科技,2010(10):158-162.CHE Tengteng,FENG Yiming,WU Chunzheng.Application of"3S"technologies in precision foresty[J].J Green Sci Technol,2010(10):158-162.
[10]徐文兵,高飞.天宝Trimble 5800单点定位在林业测量中的应用探析[J].浙江林学院学报,2010,27(2):310-315.XU Wenbing,GAO Fei.Application of single point positioning with Trimble 5800 in forest measurement[J].J Zhejiang For Coll,2010,27(2):310-315.
[11]徐文兵,李卫国,汤孟平,等.林区地形条件对GPS定位精度的影响[J].浙江林业科技,2011,31(3):54-63.XU Wenbing,LI Weiguo,TANG Mengping,et al. Effect of forested terrain on the positioning accuracy of GPS[J].J Zhejiang For Sci Technol,2011,31(3):54-63.
[12]冯仲科,游先祥.普通手持式GPS接收机用于林区近实时差分定位的研究[J].林业科学,2000,36(6):116-118.FENG Zhongke,YOU Xianxiang.Study on forestry near-real time differential positioning portable GPS receiver[J].Sci Silv Sin,2000,36(6):116-118.
[13]罗旭,李建双,赵岩,等.手持式 GPS在遮挡条件下提高定位精度的研究[J].沈阳建筑大学学报∶自然科学版,2007,23(2):248-252.LUO Xu,LI Jianshuang,ZHAO Yan,et al.The study on improving positioning accuracy by portable GPS receiver under obstruction conditions[J].J Shenyang Jianzhu Univ Nat Sci,2007,23(2):248-252.
[14]谭伟,王开琳,罗旭,等.手持GPS在不同林分下的定位精度分析[J].北京林业大学学报,2008,30(增刊1):163-167.TAN Wei,WANG Kailin,LUO Xu,et al.Positioning precision with handset GPS receiver in different stands[J].J Beijing For Univ,2008,30(supp 1):163-167.
[15]董金仕.手持式 GPS的坐标系设置使用方法[J].西部探矿工程,2004(11):101-102.DONG Jinshi.The hand-held GPS coordinate system using the method[J].West China Explor Eng,2004(11):101-102.
[16]章雪莲,汤孟平,方国景,等.一种基于 ArcView的实现林分可视化的方法[J].浙江林学院学报,2008,25(1):78-82.ZHANG Xuelian,TANG Mengping,FANG Guojing,et al.A method of realizing stand visualization based on ArcView[J].J Zhejiang For Coll,2008,25(1):78-82.
