基于视频图像的车速检测研究
2013-12-03刘伟
刘 伟
(长安大学 汽车学院,陕西 西安 710064)
车速检测在交通事故鉴定中占有重要地位,传统的车速计算方法只能测定车辆碰撞时的速度,而汽车碰撞前驾驶员采取制动措施使车速下降,导致所测车速偏低,影响事故鉴定结果[1]。针对这一情况,本文提出一种新的基于视频图像的车速检测方法,该方法能准确的测出车辆在碰撞前的行驶速度[2],可作为交通事故鉴定的依据。该系统简单、直观、误差小,具有很强的实用性。其算法流程如图1所示[3]。
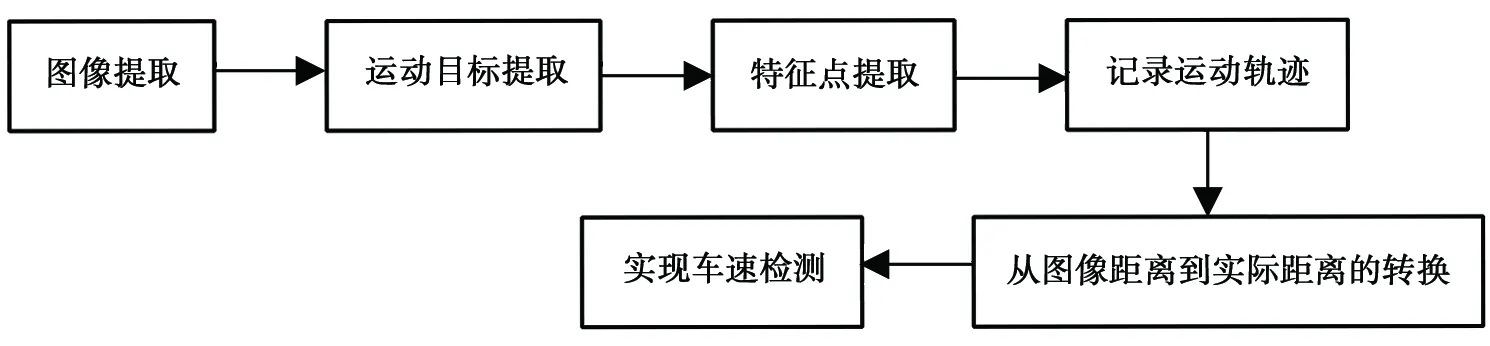
图1 车速检测算法流程
1 运动目标提取
运动目标提取是指在图像中提取感兴趣的区域(本文指车辆),并进行处理,使图像变得简单,减少数据量。
1.1 交互式目标提取
目前,提取运动目标的方法有光流法、背景差分法、帧间差分法等。
1)光流法。直接计算运动信息,对车辆的颜色不敏感,能容忍尺度的变化。但计算量大、实时性差,需要特定硬件支持。
2)背景差分法。这种方法易于实时处理,能检测出静止车辆。但对长时间光线变化敏感,背景重建比较困难,不适用于动态背景下的运动信息提取。
3)帧间差分法。对视觉场内的光线逐步变化不敏感,易于实时处理,可用于动态背景下运动信息提取。但对静止车辆无法检测,对运动车辆速度敏感,容易产生空洞现象。
本文在分析背景差分法和帧间差分法的基础上提出了一种交互式提取法,既能获得完整图像,又能消除背景光线等因素的干扰。其步骤为:把当前帧减去背景帧记为b1,把第二帧减去背景帧记为b2,对b1、b2分别进行预处理,再将b2与b1相减,通过阈值法提取运动目标,记为C21[4]。这种交互式的运动目标提取方法是人工选取所需运动目标的区域,再在这个区域中对图像进行处理,进而提取运动目标。这样做的优点在于选择性的提取运动目标不仅能排除环境变化的干扰,而且能排除运动车辆的阴影、灯光、附近接近物体的影响。

图2 区域选择
图2中的四边形为选取的需要进行图像处理的区域。从图2交互式提取的图像可以看出,该方法能够任意提取所需的运动目标,并且不会带入其它的运动物体(如图2中的摩托车)对图像的影响,这点对运动物体特征点的选取很重要。
1.2 特征点选取
为了获得图像中运动目标的运动轨迹,需要提取其特征点。特征点的提取是指在n帧图像中,能在运动物体上选取特定的点以表示该物体的位置。选取运动目标的质心作为运动目标的特征点[5]。

图3 交互式提取图像
由于拍摄所得的交通事故图像是连续的,运动物体也是快速运动的,假定相邻帧图像上的物体位置变化不大,并且它的运动方向和面积都变化不大。交互式提取运动车辆后,求取车辆质心。图3中白色区域内的点为该运动目标的特征点(质心)。
质心O坐标为
式中 wn为总像素数;f(x,y)为像素点坐标。
2 记录运动轨迹
计算车速时,需要得到汽车的运动轨迹,以便于分析车辆速度方向的改变,在此之前,要先得到车辆在图像上的运动轨迹[6]。
提取运动车辆的特征点,得到一组n帧图像中运动目标质心的坐标:{x=x1,x2,…,xn},{y=y1,y2,…,yn}。
可用直线y=a+bx来逼近这些点,采用最小二乘法求出回归系数b和回归常数a[7]。
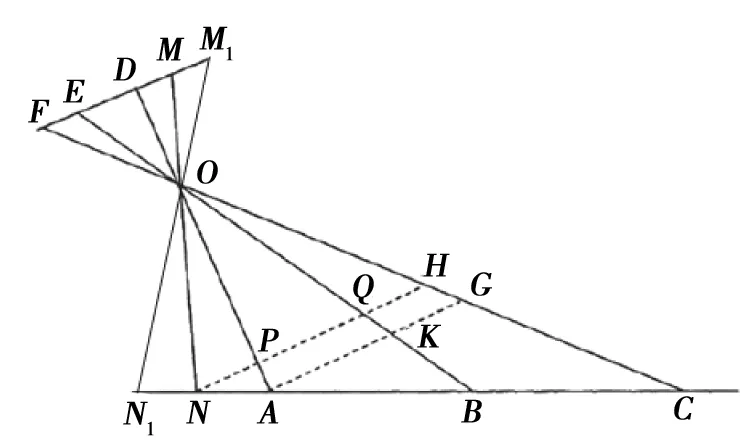
图4 透视关系推导图
有
(1)
方程(1)为所求的线性回归方程。图4中的直线MF为车辆在视频上的运动轨迹[8-9]。
3 图像距离到实际距离的转换
处理帧图片得到的只是车辆在视频上所移动的像素距离,而不是平面坐标系中以长度单位表示的距离,因此需要将图像坐标转换到平面坐标,得到平面坐标中的实际距离,这就要进行摄像机标定,进而求取实际距离[10]。

图5 透视关系推导图
采用摄影机中心透视成像原理,原理图如图5所示。
图4中D、E、F 3点分别为视频上的3个点,对应的实际道路路面为A、B、C,在视频上找点M,M点所对应的路面上的点为N,NA记为所求的实际距离[11]。NA的计算公式有4种情况。
1)M点在D点右边时,有
(2)
2)M点在F点左边时,有
(3)
3)M点在D、E点之间时,有
(4)
4)M点在E、F点之间时,有
(5)
经过计算和实验验证发现式(3)和式(5)是错误的,式(3)、(5)应该与式(2)相同,得到M点在D点右边和M点在D、E点之间两种情况。
摄像机的标定条件为:在平面坐标中,车辆的运动轨迹是直线或近似直线,并且在这条直线上3个标定点(D、E、F)对应的实际间距相等且为已知(即DE和EF对应的实际距离AB和BC已知)。而当车辆运动轨迹是曲线时,为便于计算,需要对相互垂直的2个方向进行标定。
D、E、F点组成的直线称为标定线,标定线可以选取车体本身、道路标记线、人行横道线、其它距离已知的物体或标记等。根据该原理若车辆在第t1时刻位于N1处,在第t2时刻位于N处,则车辆在t1、t2时刻之间的行驶速度为
υ=|AN1-AN|/|t2-t1|.
(6)
4 实验结果及分析
4.1 事故背景
4.1.1 基本情况
某地某一时刻,轿车甲和摩托车乙在十字路口发生碰撞事故。要求根据事故录像、事故现场图对甲乙两车进入交叉口时的行驶速度进行鉴定。
4.1.2 通常算法
该监控视频帧率f=25帧/s。轿车由视频画面左侧进入监控范围开始,轿车最前端、最后端连续经过视频画面同一点的视频帧数n约为3~3.5帧,该车身长度L=3.895 m,由式υ=3.6L/(n/f),计算出该车在事故发生前的行驶速度约为100.2~116.9 km/h。
4.2 本文算法
通过Matlab GUI界面实现输入图片、数据,进行图片处理与运动轨迹拟合,求得车辆的行驶速度。
图6为第1帧到第n帧特征点提取,图7为运动轨迹拟合曲线。
由式(6)得
v=3.6s/t,
( 7)
式中 s为相邻帧之间的距离,m;t为相邻帧的时间间隔,s。

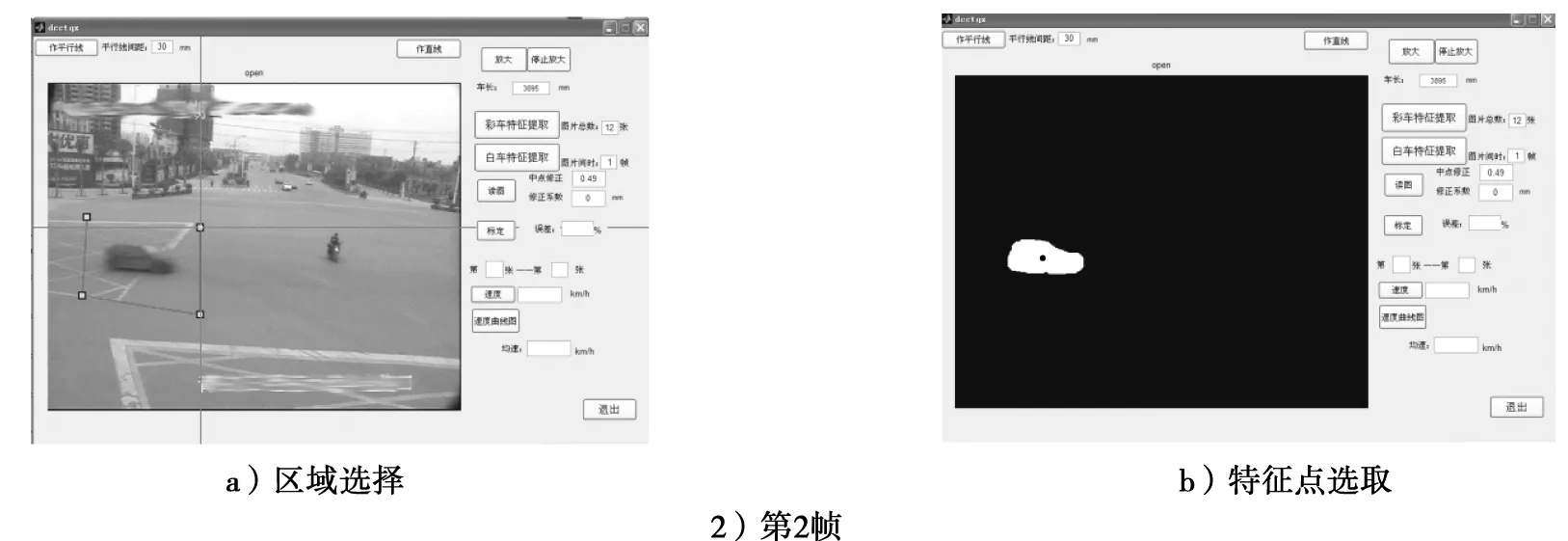

图6 特征点的提取
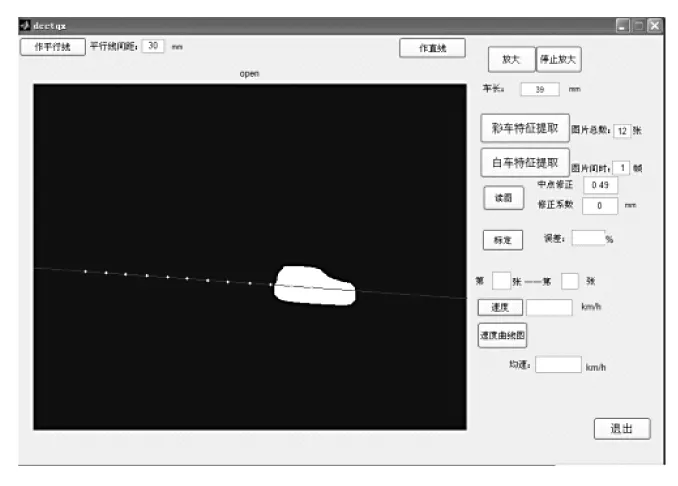
图7 运动轨迹拟合曲线
根据s不同,通过式(7)可以求出任意两帧之间的速度。
为了得到汽车在碰撞前的准确车速,对车辆行驶至第1帧到第11帧的相邻帧之间的速度进行了2次测速。
第1次测速:车辆行驶至第1~2、2~3、3~4、4~5、5~6、6~7、7~8、8~9、9~10、10~11帧间的速度分别为:103.0,104.4,104.2,96.7,95.6,95.0,94.6,93.8,91.1,88.9 km/h。
第2次测速:车辆行驶至第1~2、2~3、3~4、4~5、5~6、6~7、7~8、8~9、9~10、10~11帧间的速度分别为:107.0,107.5,107.2,99.5,98.3,97.6,97.1,96.2,93.4,91.2 km/h。
4.3 结果分析
第1次测速得到的平均速度为96.8 km/h,第2次测速得到的平均速度为99.5 km/h。把2次得到的测量值取平均值,可得到汽车在碰撞前理论上的真实车速为97.3 km/h。因此,汽车在前几帧时处于明显的超速状态。
鉴定结果为:该车辆在视频中第1帧至第11帧的平均速度为96.8~99.5 km/h。最高速度为104.4~107.5 km/h。与传统视频法鉴定计算得出的结果相比,基于视频图像计算车速的方法精度更高,取值范围更小,误差也更小。
参考文献:
[1]张新海.交通事故车速测算方法探析[J].刑事技术,2008(4):33-36.
[2]冯浩,潘少猷,陈建国.基于视频的车速鉴定方法[J].中国司法鉴定,2009(5):45-47.
[3]袁泉,张高强,郭锐,等.交通事故车速分析理论方法的研究进展[J].交通运输工程与信息学报,2009,7(2):22-25.
[4]李刚,邱尚斌,林凌,等.基于背景差法和帧间差法的运动目标检测方法[J].仪器仪表学报,2006,27(8):962-966.
[5]王光玲.基于运动目标检测与跟踪视频测速算法的研究[D].山西:太原理工大学,2009.
[6]彭雅芳,吕植勇.一种基于车辆运动轨迹的车速估算方法[J].计算机与数字工程,2008,36(11):134-137.
[7]张重德,张崇巍.一种提高视频车速检测精度的方法[J].上海交通大学学报,2010,44(10):44-46.
[8]于艳玲.视频检测系统中的车速检测技术研究[D].西安:长安大学,2009.
[9]伍友龙.基于图像分析的高速公路交通事件检测算法研究[D].湖南:长沙理工大学,2005.
[10]王骏飞,罗大庸.一种新的基于视频技术的车速检测方案[J].自动化技术与应用,2010,29 (3):35-37.
[11]李欣菊.摄像机标定算法研究[D].武汉:中国科学院自动化研究所,2003.
