某自行高炮火控系统软件设计与仿真测试
2013-11-21徐建锋
杨 维,赵 凯,徐建锋,赵 维
(西北机电工程研究所,陕西 咸阳 712099 )
现代火控系统由火控计算机来完成数据处理工作,其任务是融合有关目标诸元、气象诸元、弹道诸元、武器载体姿态诸元;估算目标运动诸元;根据实战条件下的弹道方程或存储于火控计算机中的射表求解命中点坐标;计算射击诸元;根据实测的脱靶量修正射击诸元等。本文详细论述了火控系统软件的总体设计思路和方法,给出了火控软件中航迹滤波模块和解命中模块关键技术的详细设计算法,对工程实践有一定的指导作用。
1 火控系统软件总体设计
火控系统软件总体结构如图1所示。其中,点划线以上的部分表示任务之间的调用关系,点划线以下的部分表示数据的流向,两者之间存在大致的对应关系。
1.1 任务及其调用关系
1) 主任务:主任务是整个软件系统中第1个被调用并执行的任务。其主要功能为:(1) 初始化中断服务程序,使其在收到中断命令后执行中断服务函数;(2) 初始化CAN;(3) 创建定时器并使之与定时器任务相关联;(4) 调用CAN接收任务,等待外部数据输入;(5) 为一些公共变量设置缺省值。
2) CAN接收任务:CAN接收任务中用While循环反复调用CAN接收函数进行数据接收,如果收到了新数据,则调用CAN处理函数处理CAN消息。
3) 中断服务程序:其主要功能就是启动一个时间间隔为1 ms定时器,该定时器每1 ms执行1次定时器任务。
4) 定时器任务:定时器任务每1 ms执行1次,在合适的时序下调用跟踪任务和解命中任务对接收缓冲区中的数据进行处理,求解命中点以及射击诸元,并调用发送任务输出解命中结果和系统状态。
5) 跟踪任务和解命中任务:跟踪任务的主要功能就是坐标转换和Kalman滤波,最多可以同时跟踪两个目标(光电1个、雷达1个),对每个目标同时进行匀速Kalman滤波和匀加速Kalman滤波,并实现两种滤波模型的自动切换。解命中任务的主要功能就是根据Kalman滤波的结果通过查射表求解命中点和射击诸元。
6) 发送任务:跟踪任务和解命中任务处理完数据后,将解命中结果和系统状态送入发送缓冲区。在发送时序到来时,发送任务按规定的ID和协议将发送缓冲区中数据发送出去。
1.2 数据流
1) 接收缓冲区。接收缓冲区主要功能是接收光电、雷达、导航与姿态、初速测量和主控制台发送的测量数据及控制指令。
2) 内部数据流。从图1可以看出,任何一个Kalman滤波器的输入为姿态和目标测量数据。Kalman滤波器的输出为目标的位置、速度、加速度以及运动模型匹配度,其中运动模型匹配度用于模型匹配,以判断当前应该采用哪种模型的数据更可信,而其它信息则构成了解命中任务的输入数据。
状态控制逻辑的主要输入就是系统控制指令和火控控制指令,用于火控工作状态控制。
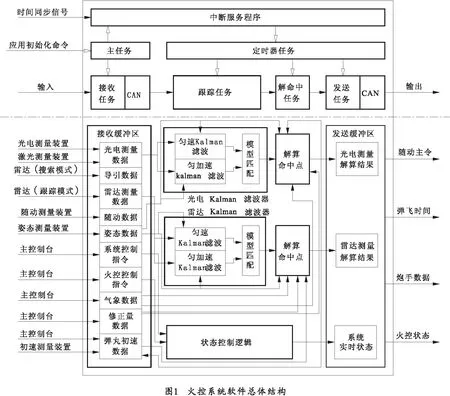
3) 发送缓冲区。发送缓冲区中的主要内容就是两个被跟踪目标的射击诸元。
2 算法设计
转换测量Kalman滤波算法和解命中算法是火控系统软件的核心技术,其中Kalman滤波算法用于实现目标诸元的估计和数据平滑,解命中算法负责实现求解射击诸元。
2.1 转换测量Kalman滤波算法
状态方程:X(k+1)=FX(k)+ΓW(k)
(1)
测量方程:Z(k)=HX(k)+v(K)
(2)

对于匀速直线运动的,式(1)中的F和Γ可以表示为:

(3)
式(2)中H可以表示为:
H=[I303]
(4)
而对于匀加速直线运动的目标,式(1)中的F和Γ分别可以表示为:
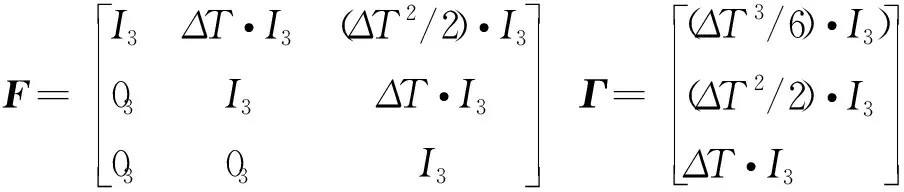
(5)
式(2)中H可以表示为:
H=[I30303]
(6)

滤波估计:


(7)
滤波增益:
K(k+1)=P(k+1|k)HT[HP(k+1|k)HT+
R(k+1)]-1
(8)
单步预测误差协方差矩阵:
P(k+1|k)=FP(k|k)FT+ΓQ(k)ΓT
(9)
滤波误差协方差矩阵:
P(k+1|k+1)=[I-K(k+1)H]P(k+1|k)
(10)
对于3D雷达,转换测量误差的协方差矩阵R(k+1)=E[v(k+1)vT(k+1)],其元素为:
(11)
2.2 解命中算法
2.2.1 基于射表插值的解命中方程组
根据射表,所有需要求解的参数均成为与命中点斜距离Dq和高低角εq相关的函数,例如弹丸飞行时间的函数为:
Tf=Tf(Dq,εq)
(12)
实际上,射表中还要考虑气温、气压、风速、风向和弹丸初速对命中点的影响,解命中方程组可以描述为:
(13)
式(13)中,α(Dq,εq) 是弹道落差高角,ΔαV(Dq,εq)是弹丸初速变化引起的弹道落差高角修正量,ΔαT(Dq,εq)是温度变化引起的弹道落差高角修正量,ΔαP(Dq,εq)是大气压力变化引起的弹道落差高角修正量,Δαnf(Dq,εq)是逆风引起的弹道落差高角修正量,Δβpl(Dq,εq)是偏流引起的方位角修正量,Δβhf(Dq,εq)是横风引起的方位角修正量,ΔTfV(Dq,εq)是弹丸初速变化引起的弹道落差高角修正量,ΔTfT(Dq,εq)是温度变化引起的弹道落差高角修正量,ΔTfP(Dq,εq)是大气压力变化引起的弹道落差高角修正量,ΔTfnf(Dq,εq)是逆风引起的弹道落差高角修正量,x、y和z为现在点的大地坐标,vx、vy和vz为现在点的速度,ax、ay和az为现在点的加速度,xq、yq和zq为未来点的大地坐标。Δv、ΔT、ΔP和ΔNF和ΔHF的计算公式为:
(14)
其中,v为弹丸初速,T为空气温度,p为大气压力,vF为风速,βF为风向。
2.2.2 弦截法
求解式(13)非线性方程组的方法比较多,如简单法、二分法和弦截法等,其中弦截法具有较好的稳定性和较快的收敛速度,现将其主要计算流程描述如下[4]:
构造命中函数:
F(Tf)=Tf(Dq,εq)-ΔV·ΔTfV(Dq,εq)-ΔT·ΔTfT(Dq,εq)-ΔP·ΔTfP(Dq,εq)+ΔNF·ΔTfnf(Dq,εq)-Tf
(15)
解命中实质上就是求解方程:F(Tf)=0。该方程的弦截法迭代格式为:
(16)
其中,i=1,2,…,n,表示解命中的序号;j=1,2,…,n表示迭代的序号。
在迭代过程中,迭代初值的选取对收敛速度影响很大[5]。首次解命中时,其迭代初值为:
(17)
(18)

3 仿真分析
设目标速度v=300 m/s,航路捷径P=1 200 m,飞行高度H=1 000 m,方位、高低测量噪声为1.0 mil,导航参数为7°/2s,火控解算诸元输出结果如图2所示。

为了验证火控解算诸元的正确性,对模拟装置上保存的原始数据进行了目标真值的求解,然后将求解结果与火控计算机解算结果进行了比较,得出方位角和高低角的系统误差、均方误差如表1所示。

表1 火控诸元误差
此外,还对火控软件进行了实时性测试,测试条件为:硬件板卡为德国控创ETX计算机;CPU主频为1 Gbit;操作系统为Vxworks。测试结果:火控软件可以在1 ms内完成20~30次运算,CPU占用率为5%~7%,满足实时性的需求。
4 结 论
本文提出的火控系统软件包括主任务、CAN接收任务、定时器任务、跟踪任务、解命中任务和发送任务等,具有一定通用性。在VxWorks下完成了软件的具体实现,通过仿真分析和测试,表明该软件设计合理、求解精度高、实时性和稳定性较好。
[1] LERRO D, BAR SHALOM Y. Tracking with debiased consistent converted measurements versus EKF[J]. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(3): 1015-1022.
[2] 杨春玲, 倪晋麟, 刘国岁,等. 转换坐标卡尔曼滤波器的雷达目标跟踪[J]. 电子学报, 1999, 27(3): 121-125.
YANG Chun-ling, NI Jin-lin, LIU Guo-sui,et al. Debiased converted measurement KF for radar target tracking[J]. Journal of Electronics, 1999, 27(3):121-125.
[3] 王国宏,毛士艺,何友.均方意义下的最优无偏转换测Kalman滤波[J].系统仿真学报,2002,14(1):119-124.
WANG Guo-hong, MAO Shi-yi, HE You. Optimal unbiased converted measurement kalman filtering in the mean-squre sense[J]. Journal of System Simulation, 2002, 14(1): 119-124.
[4] 王航宇, 王士杰, 李鹏. 舰载火控原理[M]. 北京: 国防工业出版社, 2006.
WANG Hang-yu, WANG Shi-jie, LI Peng. Principle of carrier-borne fire control system[M]. Beijing:National Defense Industry Press, 2006.
[5] 陈群斋. 快速解命中的一种有效方法[J]. 火力与指挥控制, 1995, 20(1): 24-26.
CHEN Qun-zhai. An efficient method of quick solving hit problem[J]. Fire Control & Command Control, 1995, 20(1): 24-26.
