基于Adam s的仿人机械灵巧手动力学仿真分析研究
2013-10-15郑显华刘新华李生鹏
郑显华,刘新华,张 霖,李生鹏
(中国矿业大学 机电工程学院,徐州 221116)
0 引言
机器人的出现为工业生产、医药、军事、航空、科研等领域做出了巨大贡献[1~3],是实现工业自动化的关键技术。围绕仿人机械灵巧手的研究也日益受到各国学者的重视和关注,尤其是在结构仿人化、多自由度、运动和动力学的分析、传感控制等方面[4~6]。其中,一些学者就如何更好的建立仿人机械灵巧手动力学模型及其求解做了大量研究,余麟等[7]基于New ton-Eu ler方法对五指仿人灵巧手进行了逆动力学分析,得出了灵巧手的动力学方程,基于此开展了机械手的主从控制实验。王华等[8]采用切片理论对水下灵巧手手指的动力学进行了分析,考虑水阻力、附加质量力的影响,建立了较为精确的动力学模型,并采用Sim Mechanics进行了动力学仿真验证。李立全等[9]运用拉格朗日动力学方法建立了没有考虑摩擦影响下的动力学模型,并结合相应计算机算法完成该机械手的动力学逆解仿真计算。Joseph C.Chan[10]提出了一种解决碰撞、接触及滑动等问题的统一框架动力学模型,并用一种3D动态灵巧手模拟器来验证其正确性。
根据仿人机械灵巧手动力学的研究现状,一般包括三种基本模型[9,11,12]:1)牛顿—欧拉方程;2)拉格朗日力学方程;3)凯恩方程。本文基于拉格朗日动力学方程给出了仿人机械灵巧手的动力学模型,并对食指进行了Adam s动力学仿真,研究成果对于深入地研究机械手的抓持姿态及其控制系统的设计具有重要意义。
1 仿人机械灵巧手的结构设计
仿人机械灵巧手遵循了仿人手设计的理念,由手掌、五指(拇指、食指、中指、无名指和小指)、手腕以及安置于假手本体内部的驱动组成。每个手指具有3个指节和3个关节,与人手一致,拇指具有4个自由度,其余手指各具有3个自由度,加上腕关节整手具有17个自由度,仿人机械灵巧手总体结构示意图如图1所示。手指机构杆长参数的选取参考了人手指节的比例关系,通过实际测量和样本分析发现,人手指的近指节、中指节和远指节长度之间的比例关系接近于a1 : a2 :a3 = 2 : 1.35 : 1,设计时以此作为手指机构各指节近似长度之比,大拇指的总体长度为112mm,其余各手指为87mm。仿人机械灵巧手的手掌及各手指的布置参数也与人手相仿,其仿人机械灵巧手的三维模型如图2所示。

图1 仿人机械灵巧手总体结构示意图
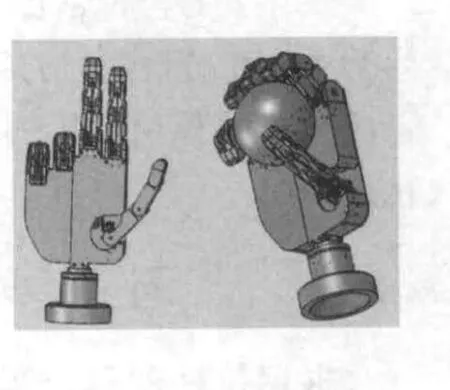
图2 仿人机械灵巧手 的三维模型图
在人手结构功能上,自然人手指的弯曲、伸展功能起主要作用,而侧摆功能作用较小,因此为简化手指结构、减轻假手重量,假手手指只保留弯曲、伸展功能而忽略侧摆功能(大拇指保留)。各手指均采用微型直流电机驱动,通过减速箱、伞齿轮传动减速和耦合四连杆机构把运动和力传递给各个指节,实现手指各指节的运动和物体抓取。
2 仿人机械手的动力学模型
各手指分别由电机驱动,力和力矩由各关节传递到手指和指端,为了研究仿人机械手的动力学特性,本文运用拉格朗日法给出了仿人机械灵巧手的动力学模型。由于各手指结构相似,研究单个手指动力学特性即可,以食指为例,食指运动关系结构如图2所示。

图3 食指结构示意图


根据拉格朗日方程的分析,得出食指的动力学方程为:


式中:
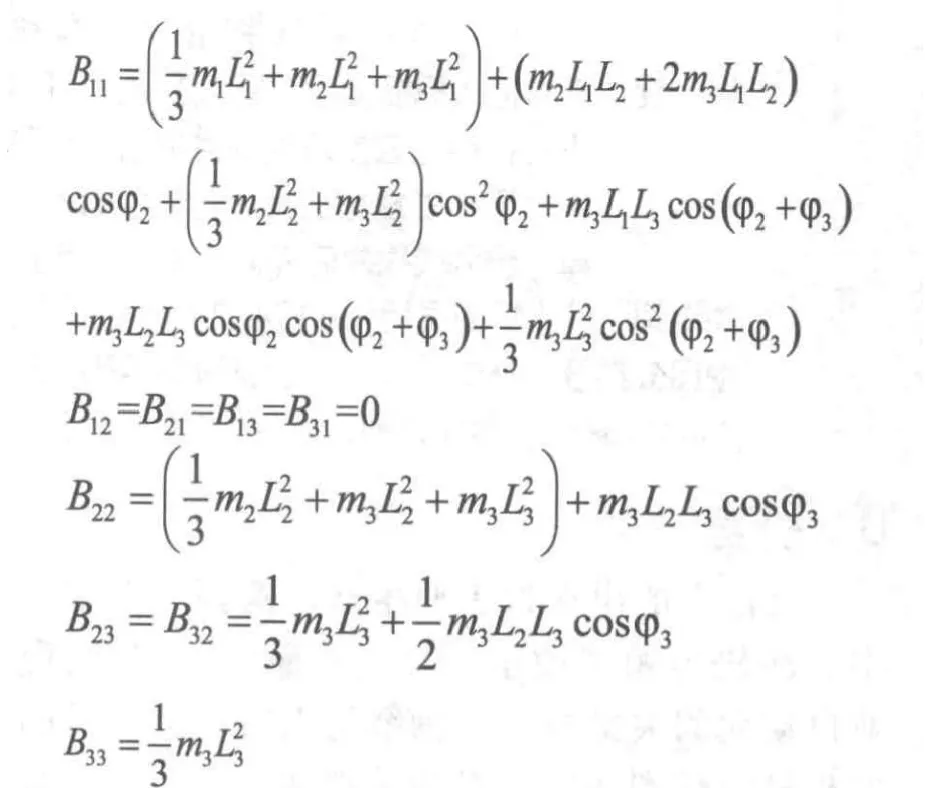
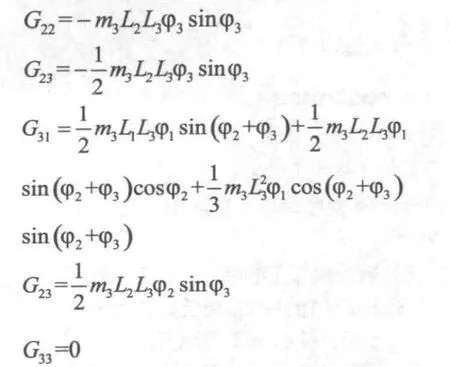
其中 可表示为:
式中:

在给出食指动力学模型的过程中,没有考虑手指与物体的作用力,故需要对模型进行修正,假设手指与物体有力的作用为,则修正的动力学模型为:

3 基于Adam s的动力学仿真分析
在对仿人机械灵巧手的食指动力学模型分析基础上,为了更直观的分析手指与物体接触时作用力与各关节驱动力矩之间的关系,利用虚拟样机仿真软件Adam s对手指进行动力学仿真分析。以食指为例,首先将食指三维装配体模型转换成x_t格式文件,并导入到Adam s工作环境中;建立各关节和指节之间的约束关系,设置相关参数,并对指尖法向施加一个5N的作用力;最后,利用so lver对食指进行动力学仿真,仿真过程如图4所示。
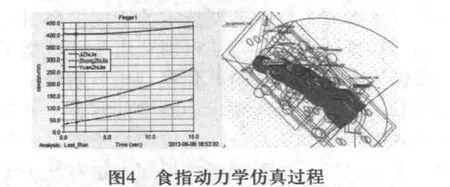
图4 食指动力学仿真过程
得到仿真结果后,利用Adam s的后处理模块输出各个关节的驱动力矩,如图5所示。分析可知,远关节的力矩最小变化范围从30N.mm到130N.m m,且变化平稳;中关节的力矩变化范围从110N.mm到265N.mm,其变化范围较远关节来说稍大一点;基关节的力矩变化范围最小,从404N.mm变化到401N.mm再到433N.mm,其变化幅度总的来说较为平稳。
综上动力学仿真分析结果,各关节运动力矩变化较为平稳,没有突变,具有线性特性,从而提高了手指运动的稳定性,也符合人手的运动规律。
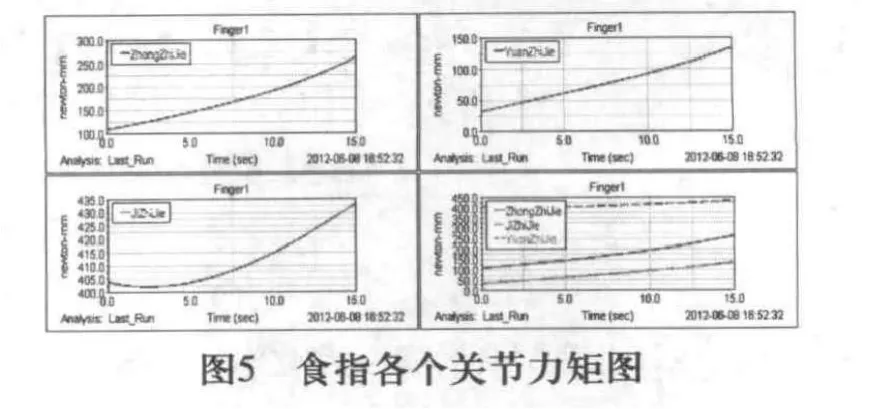
图5 食指各个关节力矩图
4 结束语
本文首先分析了仿人机械灵巧手的运动规律,建立了其总体结构;给出了基于拉格朗日力学方程的食指动力学模型,并考虑手指与物体的作用力,进而对模型进行了修正;在动力学分析的基础上,运用虚拟样机仿真软件Adam s对食指进行动力学分析。结果表明:手指运动是稳定的,且符合人手运动规律;研究结果对仿人机械灵巧手的设计及其在工业自动化中的应用具有十分重要的意义。
[1] 姜杉,杨志永,李佳.医用机器人研究、应用与发展[J].机床与液压,2005,(5):1-5.
[2] 王鹏,李鑫,江文浩.地震搜救机器人构型设计综述[J].哈尔滨理工大学学报,2012,17(1):15-19.
[3] J. G. Chand ler, 陈石卿. 机器人在维修中的应用[J].航空维修与工程,2010,(6):24.
[4] 赵大威,姜力,黄海,金明河,刘宏.多自由度仿人型假手设计[J].哈尔滨工业大学学报,2008,40(7):1067-1070.
[5] LUQUE N. R, GARRIDO J. A, RALLI J, et a l. From sensors to sp ikes: evolving recep tive fields to enhance sensorim otor inform ation a robot-arm [J]. International Journal o f Neural System s,2012,22(4):1250013.
[6] 刘伊威,金明河,樊绍巍,兰天,陈兆芃.五指仿人机器人灵巧手DLR/HIT Hand II[J].机械工程学报,2009,45(11):10-17.
[7] 余麟,刘昊,彭光正.五指仿人灵巧手运动学与动力学模型[J].北京理工大学学报,2008,28(10):880-884.
[8] 王华,孟庆鑫,王立权.基于切片理论的水下灵巧手手指动力学分析[J].机器人,2007,29(2):160-166.
[9] 李立全,庞永刚.空间五自由度机械手动力学的研究及仿真[J].机械设计与制造,2009,(9):150-151.
[10] CHAN J.C, LIU Y. Dynam ic sim ulation of multi-fingered robot hands based on a unified m odel [J]. Robotics and Au tonom ous System s. 2000, Vo l.32-2: 185-201.
[11] 杨武,蒋梁中.采用牛顿-欧拉法的排爆机器人机械手动力学分析[J].现代制造工程,2010,(6):140-143.
[12] 王洪瑞,吕应权.BH—1灵巧手运动学和动力学建模研究[J].系统仿真学报,1997,9(3):44-50.
