基于低密度粒子图像叠加的Micro-PIV速度场测量
2013-09-21王昊利
徐 明,王昊利
(中国计量学院流体检测与仿真研究所,杭州 310018)
0 引言
Micro-PIV技术是1998年由Santiago等人在传统PIV技术基础上发展起来的微流体全场测速技术[1]。该技术通过对荧光示踪粒子图像进行互相关分析得到微流体速度矢量场,具有很高的测量精度和空间分辨率[1-2]。随着计算机技术,显微光学技术以及图像分析技术的发展,Micro-PIV技术在微流器件内流、电动微流体、微管流动转捩、流量测量乃至农业工程等领域得到了广泛应用[3-9]。早期由于条件限制,Micro-PIV实验研究通常以微流体内某一特征平面(如微通道中位面)的二维流场测量为主,揭示流场的典型局部特征。2005年以来,Micro-PIV技术已经开始逐渐向全场测量技术发展,为研究复杂流场的三维结构提供了重要的研究手段[10-11]。近年来,国内在Micro-PIV全场测量方面的研究工作也逐渐开展起来,主要通过测量不同流体层二维速度构建全场流场,这也是目前Micro-PIV获得全场流动结构的主要方法之一[12-14]。针对低雷诺数下微长直通道内全场速度场的测量,通道内部处层流状态下的流体在深度方向上的速度几乎为0,因此将不同深度层的二维速度场叠放在一起就可以获得全场速度分布。本文实测的长直微通道内流场符合这一特征,因此,可采用分层二维速度场测量进行构建。
基于粒子图像的速度场分析技术根据粒子密度的不同可分成两类,即基于低粒子密度的PIV技术和基于高粒子密度的PIV技术。前者是研究粒子运动的有效手段,但因为粒子密度较低,不适用于流场结构的测量,且算法复杂。后者则是针对流场本身的测量技术,为了获得精确的流体速度,要求判读域内有足够数量的粒子参与互相关运算,因此粒子溶液应该具有足够高的密度。但是在Micro-PIV实验过程中经常会发生粒子结团等现象,当针对极细通道或者复杂通道结构进行测量时甚至将造成通道的堵塞,而对于相当耗时的分层流场测量更是如此。如果能够发展基于低密度粒子的Micro-PIV测量方法,就可大大减小粒子结团的几率,降低通道堵塞的风险。因此,如何在低粒子密度条件实现Micro-PIV全场速度测量是目前微流体粒子测速技术的一个新的研究方向。对于定常或者准定常微流体流动,将测量时间序列上的低粒子图像进行叠加处理,可以获得一个满足PIV互相关计算的粒子图像密度,由此实现低密度粒子条件下的Micro-PIV测量[15]。但是,如果直接对原始粒子图像进行叠加,则背景噪声也将被放大,甚至掩盖粒子图像信号,反倒不利于速度场分析。因此,针对低粒子浓度的图像叠加法进行了研究,通过背景噪声消除、阈值过滤、图像增强、图像叠加等主要过程来实现对长直微通道内全速速度的构建。
1 Micro-PIV系统及实验平台
本研究是在中国计量学院流体检测与仿真研究所的微流体检测实验室开展的。所用的Micro-PIV系统由德国Lavision公司提供,如图1所示。系统由Nd:YAG 15mJ双脉冲激光器(美国 New Wave公司,5 3 2 nm)、ImagerIntence型CCD相机(像素为1376×1040,12位灰阶)、PTU9同步控制器、MITAS显微系统、微量注射泵(兰格公司,精度为0.5%)以及工作站组成。由系统所带DaVis7.2软件完成对各硬件设备的驱动和控制。Micro-PIV的测量原理如图2所示,波长为532nm(绿色)的激光对荧光示踪粒子进行照明,粒子将被激发出610nm的红色荧光,经过显微物镜进入CCD相机成像,CCD相机记录连续两次曝光时间间隔粒子的位移情况,最后利用Flowmaster软件模块计算速度场。实验所用示踪粒子为直径1μm的荧光染色聚苯乙烯微球(美国Thermal Scientific公司),考虑将粒子原溶液和去离子水按体积比1∶100混合为低密度粒子溶液。该溶液配比相对适中,既能实现粒子图像叠加处理过程,同时也不至于因溶液密度过低而增加叠加处理的工作量。粒子溶液经注射泵注入一个截面宽度约为250μm,深度为60μm的长直微通道。微通道通过光刻技术加工而成。采用20×0.40(放大倍率×数值孔径)的L D Plan-Neofluar型显微物镜(德国Carl Zeiss)对荧光示踪粒子进行显微图像获取。

图1 Micro-PIV系统图Fig.1 Micro-PIV system

图2 测量原理Fig.2 Principle of measurement
2 低密度粒子图像叠加技术
2.1 图像叠加技术的处理流程
图像叠加技术是对定常或准定常流动一个时间序列不同时刻拍摄的粒子图像进行灰度相加的处理过程。如上文所述,这一过程并非仅仅通过图像叠加操作就能实现,而需要在图像叠加之前完成一系列图像处理过程。而所谓的图像处理就是针对离散的二元光强函数I(x,y),即坐标(x,y)处图像的灰度值进行数学运算的过程[16]。所研究的低密度粒子图像叠加的处理流程由图3所示。首先利用Micro-PIV系统获得低密度荧光示踪粒子的原始图像,然后对所获取粒子图像经过背景噪声去除、阈值过滤和图像增强等方法进行预处理,去掉除了粒子信息以外的所有的背景噪声,最后将进行图像灰度叠加直到粒子图像分布密度满足Micro-PIV互相关分析的要求。完成上述图像处理过程的程序代码由C#语言实现。

图3 图像叠加法处理流程Fig.3 Flow chart of the method of image overlap
2.2 原始图像的预处理
Micro-PIV系统获得的原始粒子图像如图4所示。可以看到,原始粒子图像密度比较低,如果直接进行互相关分析,则很难得到全场速度。虽然图像中的粒子灰度值高于周围的背景灰度(主要源于CCD相机的热噪声),但如直接对原始图像进行叠加,背景噪声也会随之放大,随着叠加次数的增加,噪声的灰度值甚至会逼近粒子图像的灰度值,将造成粒子和背景无法区分的状况。因此在图像叠加之前先要去除图像中的背景噪声。为此,实验针对未加示踪粒子的去离子水单独拍摄一幅图像作为背景图像,见图5。由于原始图像和背景图像的噪声灰度分布一致,因此将粒子图像和背景图像进行相减操作即可以很大程度消除背景噪声,处理结果如图6所示。

图4 原始粒子图像Fig.4 Original particle image

图5 背景图像Fig.5 Background image

图6 原始图像与背景图像相减后的粒子图像Fig.6 Particle image after subtraction
由于Micro-PIV采用的是体照明方式[17],因此通道内沿景深方向的粒子都会在焦平面成像,其成像规律如图7所示[15]。可以看到,随着远离焦平面距离的增加,粒子的像径逐渐变大,而粒子图像的灰度值逐渐减小。在进行速度场计算时,景深以外的粒子(称为背景粒子)图像灰度也将参与互相关分析,在一定程度上将影响到焦平面附近粒子图像(称为信号粒子)互相关计算的准确性,从而造成速度场计算的误差。
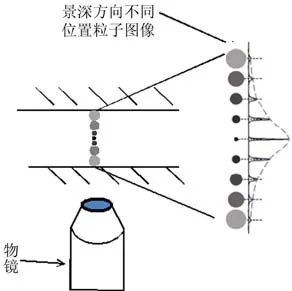
图7 景深方向粒子在焦平面的成像情况Fig.7 Particle images along the direction of the field of depth
由于景深以外粒子的成像不可避免,采用原始图像与背景图像相减的方法,虽然能在一定程度上降低大像径背景粒子图像的灰度,但无法从图像中根本消除,将在互相关分析中引入误差。更重要的是,由于每幅图像中都存在背景粒子图像,当经过多个图像叠加后,仍然会出现较大的背景噪声,甚至会淹没信号粒子图像。为了避免以上问题,在完成图像相减处理之后,采用阈值过滤方法对图像做进一步的处理。由于背景粒子图像的灰度值较信号粒子图像相比更小,处理时可以设定一个灰度阈值I0,将高于I0的粒子作为信号粒子图像,而小于I0的粒子像则作为背景粒子图像将被过滤。阈值过滤采用文献[15]所建议的公式,如下式所示

其中,I(x,y)是经过阈值过滤后的粒子图像灰度分布,I(x,y)是过滤前的粒子图像灰度分布,I0是灰度阈值。该式表明,原始图像中灰度不高于阈值的所有点,灰度值全部处理为零。由于图像成像质量的不确定性,I0并非是一个明确的数值,在实际处理过程中需要对不同的I0进行测试,得到一个最佳值。经过多次测试,发现当阈值I0=20的时候,能够得到无背景噪声且几乎不失真的粒子图像。
经过上述图像处理,所有粒子图像的灰度值均有所下降,还需对粒子图像灰度进行增强,经过增强处理的粒子图像如图8所示。可以看到,处理后的粒子图像具有相当高的质量,每个粒子都清晰可见,像径适中且大小均匀,而背景噪声几乎全部消除掉了。因为已经看不到像径大且灰度值低的粒子,表明背景粒子图像已被成功过滤掉。以上所有处理过程被称之为图像叠加法的预处理阶段。

图8 去噪声后的图像Fig.8 Particle image after denoising
2.3 低密度粒子图像叠加
在完成上述图像预处理基础上,即可针对一个时间序列的多个粒子图像进行叠加处理。图像叠加方法就是将大小相同的一组图像进行灰度相加,即

其中,Ii(x,y)为在所测量的时间序列中的第i个粒子图像灰度分布,I(x,y)为经过n个图像叠加后(叠加图像)的灰度分布。
由于针对所拍摄的一个时间序列的粒子图像进行叠加,因此同一个粒子在不同时刻会跟随流体运动到不同的位置。当多幅粒子图像进行叠加后,该粒子将出现在叠加图像的不同位置,这就形成了一个累积效应,从而达到高密度粒子的图像效果。为了直观地说明这一问题,图9给出了采用3对粒子图像的叠加示意图。图中给出了一个时间序列中的3对粒子图像,上下两组序列表示不同时刻(t1~t3)的跨帧图像对,跨帧时间为Δt。为了方便说明且不失一般性,在每个图像里仅放置一个粒子。可以看到,将3对图像相加后得到了叠加图像I和I',其相隔时间仍为Δt。原来每个图像中仅有的一个粒子在叠加后的图像中变为3个粒子,而每个粒子都在Δt内平移了Δs距离,见图9(b)所示。显然,这种操作对于图像中存在多个粒子的情况仍然适用。
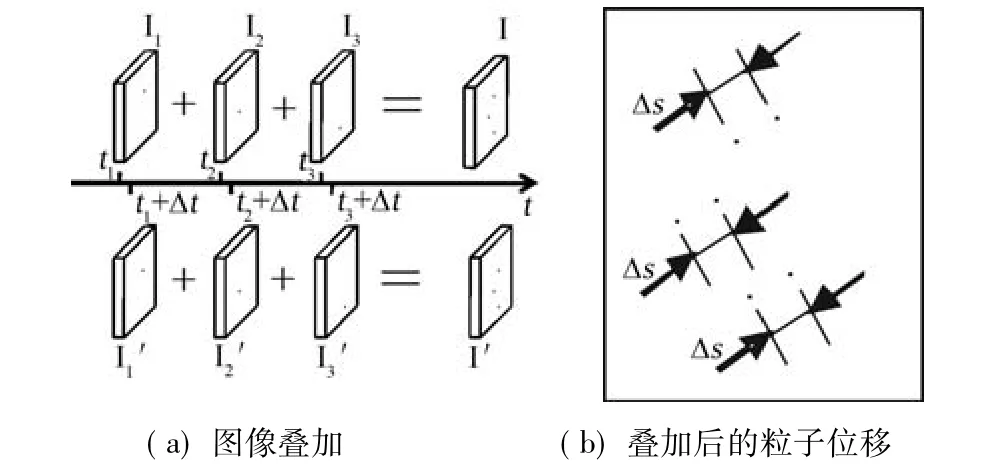
图9 图像叠加示意图及叠加后的粒子位移Fig.9 Schematic diagram of the image overlap and the displacements of particles
按照以上图像叠加方法,当参与叠加的粒子图像增加到某一个合适的数量,叠加图像将获得一个合适的图像密度从而能够实现互相关分析。按照以上图像叠加方法,当参与叠加的粒子图像增加到某一个合适的数量,叠加图像将获得一个合适的图像密度从而能够实现互相关分析。建议当粒子和水的密度配比为1∶n,且满足n≫1(例如n≥100)的条件时,可先取n作为参考的叠加图像数,在实验过程中通过进一步观察叠加图像的粒子密度情况,作相应调整。在图8的粒子图像密度基础上进行了100次图像叠加,获得的两帧叠加图像由图10给出。可以看到,经过叠加后的粒子图像达到了较高的粒子数密度,适合采用互相关算法进行速度场计算。因此,只要流动处于定常或准定常状态,均可以采用这一方法实现低粒子密度的图像叠加。由于图像叠加方法可认为是不同时刻粒子在同一个平面上的投影,因此会出现多个粒子重叠在一起的问题,其结果类似于高密度条件下的粒子结团现象,从图10中所能看到的个别粒径较大的“粒子团”即是此类情况。但该现象与高密度条件下粒子结团现象有本质区别。图像叠加造成的像径增加仅是粒子在同一位置附近投影积聚的表观现象而非真正的粒子结团,因此不存在干扰流场、堵塞通道等问题。此外,从图10中可看到出现的“粒子团”所占比重很小,不会对全场速度计算造成大的影响。
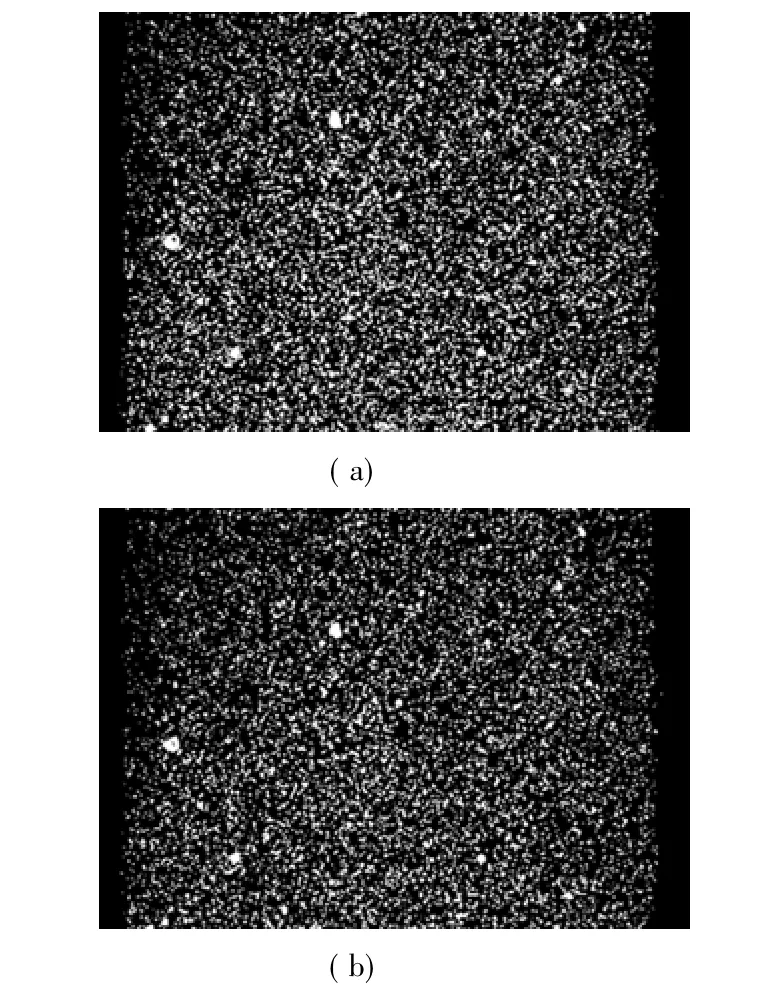
图10 叠加100次后的两帧图Fig.10 Two frames of the overlapping particle images based on 100 pairs of low density particle images
3 全场速度构建及分析
在完成图像叠加的基础上即能够利用互相关算法进行速度场的分析和计算,而速度场的计算结果也能够对图像叠加法的可行性进行验证。通过Micro-PIV跨层二维测量(即扫描)方式进行微通道内部流动速度场测量[11-14]。
开展的微通道全场速度实验研究是利用Micro-PIV系统自带的高精度三维坐标平台实现流体层粒子图像的精确定位扫描,该坐标调节系统垂直方向位移的最小分辨率可达0.1μm,由驱动软件实现平台垂直方向的坐标控制。实测中,注射泵的输入流量设定为30μL/min,测量微通道内12层流体平面,层间距是5μm,得到不同流体平面的原始粒子图像,经过图像叠加法处理后,利用互相关算法获得各个流体平面的二维速度矢量场。图11给出了每个流体平面的粒子图像经过100幅图像叠加处理后计算的二维速度分布,按照从通道底层到顶层的顺序排列。可以看到,二维速度分布完全符合预期结果:从底层到顶层速度场经历从小增大再减小的过程,反映了微通道粘性流体的层流流动特征。从单层的速度矢量场来看,近壁区流体的速度趋于0,平面轴线附近速度矢量最大,且二维速度呈现展向对称的分布特征,这一点从中间若干平面的流场分布及颜色变化能清楚地看到。能够获得准确的二维速度场有两方面的原因:一是图像叠加法能够获得合适的粒子图像密度,且两帧粒子在判读域内存在平移效应,符合互相关算法的应用条件;二是由于叠加前必须采用图像处理技术去除像径大且灰度低的背景粒子图像(否则无法进行叠加运算),从而使被测平面仅保留了焦平面附近的粒子图像,对于该平面速度场的准确计算起到了关键作用。从12层速度场对比情况来看,第1、2层及第11、12层处于通道下壁面和上壁面附近,因壁面粗糙度的影响,速度场存在波动现象。也可以看到通道上下壁面区速度并不对称,第1层到第3层流场变化比较缓慢,而第10层到第12层却存在较大的变化,反映了上下壁面附近宽度和粗糙状况有所不同。
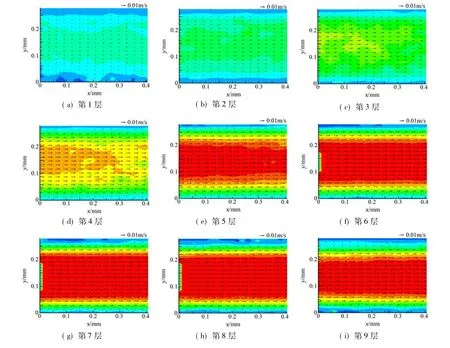
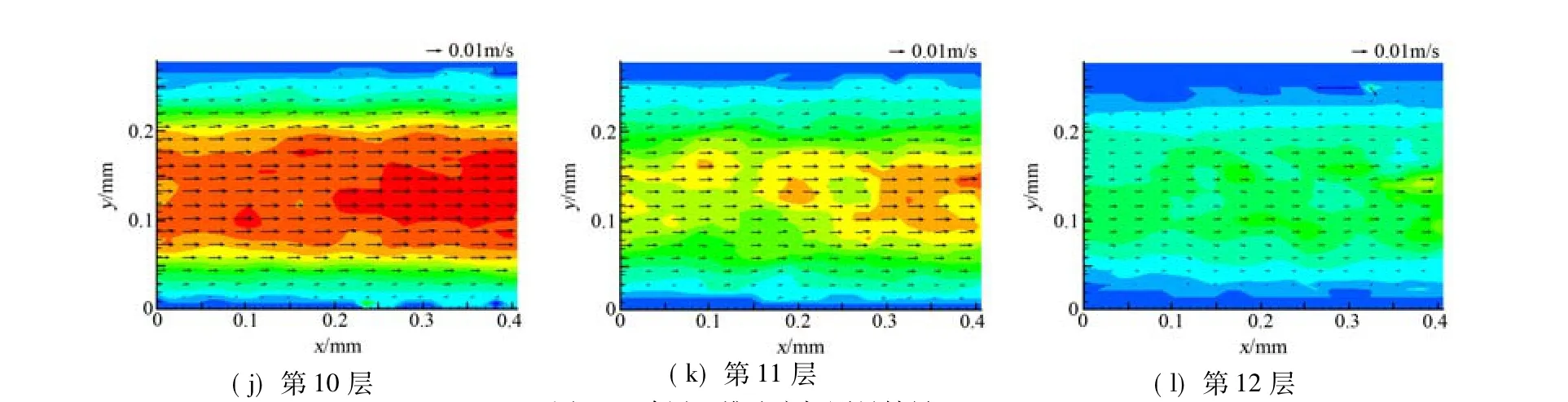
图11 跨层二维速度场测量结果Fig.11 Two-dimensional velocities on every fluid plane
借助于计算机图形软件对以上二维速度场进行全场可视化构建,得到了微通道内全场速度分布,见图12。由此可以更加直观看到微通道内全场速度分布规律,即在近壁区的流速小,主流区流速大,形成了类剖物面速度分布,而流场深度方向速度分布的不对称性也一目了然。以上结果表明,针对叠加图像进行互相关分析能够得到合理的全场速度分布。由此可见,图像叠加技术是采用低密度示踪粒子开展微流全场速度测量的有效方法。
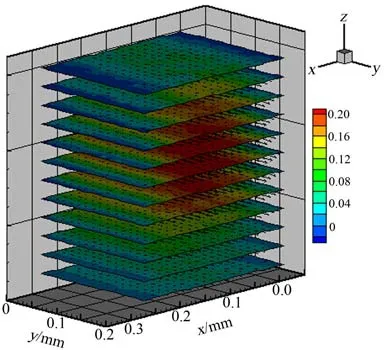
图12 微通道内部速度场Fig.12 Full velocity field in the microchannel
4 结论
采用低粒子密度图像叠加方法实现了Micro-PIV全场速度的测量。在获取示踪粒子图像的基础上,经过背景噪声去除、阈值过滤、图像增强等图像预处理过程获得了高质量的低密度粒子图像。针对100幅图像进行叠加获得了满足PIV互相关分析的粒子图像密度,利用互相关算法得到覆盖全场不同流体平面的二维速度场,所构建的全场速度符合微通道内流场分布特征。本研究将为解决定常流条件下极细通道和复杂结构微通道的全场速度测量提供新的思路。
[1] SANTIAGO J G,WERELEY S T,MEINHART C D.A particle image velocimetry system for microfluidics[J].Exp.Fluids,1998,25(4):316-319.
[2] 王昊利,王元.Micro-PIV技术-粒子图像测速技术的新进展[J].力学进展,2005,35(1):77-90.
[3] 王飞,王健,何枫.无移动部件微泵的设计、制造及基于微PIV技术的流动测量[J].实验流体力学,2005,19(3):67-72.
[4] 王健,郝鹏飞,何枫.梯形截面微管道内流场的PIV测量[J].实验流体力学,2005,19(3):94-98.
[5] 段仁庆.基于Micro-PIV技术的电动微流体测量研究[D].大连理工大学,2005.
[6] HAO PF,YAOZ H,HE F,et al.Experimental study on transitional flow in a circular microtube[J].Chin.Phys.Lett.,2006,23(10):2815-2818.
[7] WANG H L,WANG Y.Measurement of water flow rate in microchannels based on the microfluidic particle image velocimetry[J].Measurement,2009,42(1):119-126.
[8] 张永胜,王金华.利用Micro-PIV测量矩形微管道内流量[J].实验流体力学,2011,25(2):92-95.
[9] 金文,张鸿雁,何文博.微灌滴头平角齿形微通道流动实验研究[J].实验流体力学,2010,24(1):15-19.
[10] WERELEY S T,MEINHART C D.Recent advances in micro-particle image velocimetry[J].Annu.Rev.Fluid Mech.,2010,42:557-76.
[11]SHINOHARA Y,SUGII J H,JEONG K.Development of quasi-three-dimensional scanning micro particle image velocimetry system using a piezo actuator[J].Rev.Sci.Instrum.,2005,76:106-109.
[12] ZHENG X,SILBER-LI Z H.Measurement of velocity profiles in a rectangular microchannel with aspect ratioα=0.35[J].Exp.Fluids,2008,44:951-959.
[13] HAN W,WANG H L.Measurements of water flow rates for T-shaped microchannels based on the quasi-three-dimensional velocities[J].Meas.Sci.Technol.,2012,23:055301.
[14]韩巍,王昊利.基于三维速度场构建的微流量测量方法研究[J].仪器仪表学报,2012,33(2):413-420.
[15]VINH C,FOURASN A,CARBERRY J.Improvement of measurement accuracy in micro PIV by image overlapping[J].Exp Fluids,2010,49:701-712.
[16]孙燮华.数字图像处理——原理与算法[M].机械工业出版社,2010:19-33.
[17]MEINHART C D,WERELEY S T,GRAY M H B.Volume illumination for two-dimensional particle image velocimetry[J].Meas.Sci.Tech.,2000,11:809-814.
