激波风洞流场密度测量的聚焦纹影技术
2013-09-21谢爱民吕治国
谢爱民,黄 洁,徐 翔,吕治国,宋 强,郑 蕾,柳 森
(中国空气动力研究与发展中心,四川绵阳 621000)
0 引言
在风洞试验中常采用干涉法获得流场密度[1],干涉法是一种严格的定量测量技术,由流场干涉图可严格计算流场的折射率分布,进而由格拉斯通-戴尔常数公式可推算出流场密度及其它流体力学和气动力学参量。在中国空气动力研究与发展中心的激波风洞和弹道靶试验中相继开展过马赫干涉、全息干涉和纹影干涉等技术,这些方法中都利用了纹影仪光路,并把该光路作为物光束的光路。通过这些方法获得了试验干涉照片,并获得了流场的密度定量值。
上述干涉方法和常规阴影、纹影方法(即按照某种平行光路的方式通过测试流场)一样,获得的流场信息是沿着光路的整个流场的积分效应值,运用这些干涉方法获得的流场密度值是物光束沿着流场区域的密度变化积分效应,不能获得流场某个区域的密度值。而最近国内外不断发展的密度测量技术,如平面激光诱导荧光(PLIF)技术可以获得流场某个区域的荧光图像,并进一步可以获得该区域的密度值。但这些设备都比较昂贵,使用条件苛刻,图像分析技术比较复杂。
聚焦纹影技术不仅成本低和操作简单,而且该技术具有聚焦特性[2-5],通过系统的聚焦透镜可以对流场某个区域聚焦,获得的聚焦纹影图像主要反映某个流场区域的密度梯度变化,结合纹影成像技术理论对纹影图像处理后可以获得该流场区域的密度定量值。
2007年,在0.6m激波风洞上建立了测试视场为Φ100mm的聚焦纹影系统[2],获得了不同流场参数下不同流场区域的聚焦纹影图像。在该工作的后续研究中,建立聚焦纹影图像密度处理方法数学模型,编写数据处理程序,对试验中获得的聚焦纹影图像进行密度场定量处理,并对获得的部分试验结果与数值计算进行比较。
1 测量原理
在聚焦纹影系统光路中[2-5](如图1),光源穿过菲涅耳透镜及相靠的源格栅,再照射到测试区。聚焦透镜对测试区聚焦,成像在后面的一个接收平面上,同时聚焦透镜把源格栅成像在图中放置刀口栅的位置,照相机对成像面的图像进行记录。聚焦纹影光路中光束以锥形结构穿过流场,刀口栅由几十组甚至上百组明暗条纹组成。
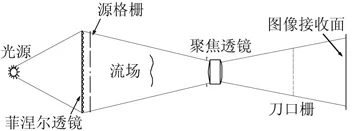
图1 聚焦纹影光路图Fig.1 Optical diagram of focusing schlieren
理想的聚焦纹影仪图像只是反映某个流场区域的信息,其它区域的信息作为均匀背景被记录下来,但实际光路中因为聚焦透镜成像的渐进特性,其它流场区域信息也会对流场图像产生一定的影响。流场图像中的明暗变化主要反映的流场区域称为急剧聚焦深度DS,其它流场区域称为非急剧聚焦深度DU,其示意图如图2所示,图中扩展函数与系统器件参数及布置的位置有关。从扩展函数曲线可以看出,在聚焦位置的中心区域该值最大,在中心区域两边逐渐减小。流场图像中的明暗变化与扩展函数、密度梯度关系式为:

其中,z1和z2是光束沿光轴进入和离开测试流场的位置,垂直于刀口的方向为“s”,ρ为密度值,设刀口水平放置,其方向为“x”方向,垂直于刀口的方向为“y”方向。
对于常规纹影仪,扩展函数σ(z)在整个z1到z2之间的测试区域为一恒定值,因而得到的密度梯度信息是沿光轴在整个测试区域的积分值。根据成像原理,对平行光路结构的常规纹影仪获得的图像处理后可以得到流场的密度定量值,但该密度是光束沿着流场的密度变化积分效应值,同时在数据处理时因为涉及很多误差源,获得的密度值变得不可信,因此在实际运用中几乎不用该方法对流场的密度进行测量。
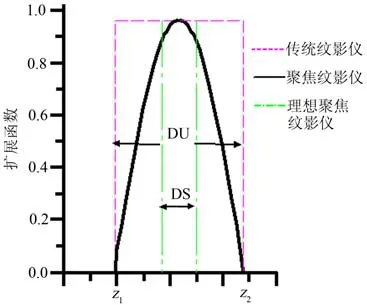
图2 纹影仪扩展函数Fig.2 Spread function of schlieren
在聚焦纹影图像中,反映的流场梯度变化主要为聚焦中心区域,如果能够计算出系统非急剧聚焦深度DU和急剧聚焦深度DS,同时在图2中z1和z2之间的任何区域的扩展函数值如果能够确定出来,则通过聚焦纹影图像按照公式(1)就可以计算出流场的密度值。
2 测试系统
根据图2表明,DS和DU越小,获得的聚焦纹影图像越能反映流场的细节结构,则根据纹影图像获得的密度值越准确。根据文献[3]公式,当聚焦透镜越靠近流场、聚焦透镜焦距越小以及刀口栅明暗条纹间距越大,则聚焦深度值越小。但这些参数也会影响整个系统的灵敏度及分辨率,如刀口栅明暗条纹间距增大时系统分辨率也会降低,因此,对聚焦纹影系统的参数最佳选择是根据使用要求确定的。
考虑0.6m激波风洞测试窗口的距离、系统灵敏度、流场持续时间约6ms等因素,设计了如图3所示的光路结构图[1]。激光光源脉宽为10ns,在流场中心区域的测试视场为Φ100mm。经过理论计算,该系统的急剧聚焦深度DS为4.6mm,非急剧聚焦深度DU约50mm。但通过在流场区域放置不同物体并根据图像的清晰度判读时,急剧聚焦深度的大小比理论值稍大,在后面的数据处理中也验证了该值提高10%时效果会更好。该系统在一次试验中只能获得流场某一个截面的纹影图像,通过多次试验可以获得同一流场参数条件下不同流场区域的聚焦纹影图像。
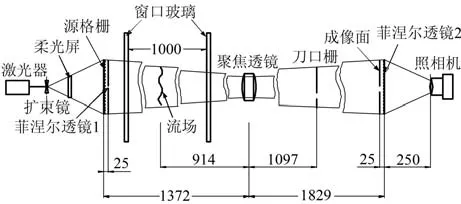
图3 0.6m激波风洞聚焦纹影光路布置图Fig.3 Optical diagram of focusing schlieren in the 0.6m shock tunnel
3 聚焦纹影图像密度计算数学模型
聚焦纹影图像主要反映的是聚焦区域密度梯度变化,根据图像明暗变化结合相关公式可以获得密度梯度,再根据密度的起始值就可以获得测试区域的流场密度值。因此,在密度的计算中,一方面需要获得聚焦纹影图像在试验前和试验过程中的灰度变化值,另一方面需要求出灰度变化与密度梯度的关系式。
聚焦纹影图像灰度变化提取过程非常简单,只需要把试验前拍摄的静态流场图像和试验中得到的流场图像灰度值提取出来,然后把两幅图像同一区域的灰度值相减即可得到灰度变化。因此,在获得两幅图像时整个系统的相互位置不能改变,如果有稍微的改变,在图像处理时必须对两幅图像的位置进行调整,以确保两幅图像对应同一测试区域。
在聚焦纹影系统中,假设刀口方向为x方向,可以推导出聚焦纹影图像上灰度变化与密度梯度的关系为[5]:

其中ΔI为流场建立前后的聚焦纹影图像灰度变化值,I0为试验前获得的聚焦纹影图像灰度值,K为格拉斯通-戴尔常数,L为源格栅到聚焦透镜距离,l为测试流场与聚焦透镜距离,a为刀口栅未切取源格栅像的高度,f为聚焦透镜焦距。
对于ΔI的贡献有急剧聚焦区域的密度梯度变化,也有非急剧聚焦区域的密度梯度变化,在进行积分时必须分别对待,根据文献[5]可以得出:
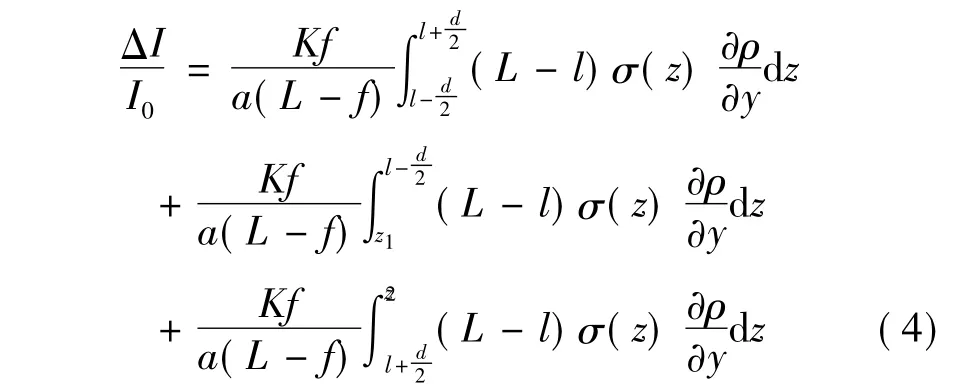
其中d为急剧聚焦深度DS值。
为了满足公式(4)的计算,扩展函数σ(z)要进行模拟处理,即把扩展函数进行一系列阶梯化处理,每个阶梯有不同的厚度,其幅值(用βi表示)大小也不一样,该幅值在0~1之间,如图4所示。
对扩展函数模拟化后,公式(3)可以描述为:


图4 非连续阶梯模拟扩展函数Fig.4 The spread function modeled as discrete steps
上式中的j代表不同的流场区域。为了从急剧聚焦平面的信息减去非急剧聚焦平面的信息,公式(5)换算成密度梯度的表达式如下:
上式中N为阶梯数目,根据图4则阶梯数目N为7个,即把测试流场划分了7个区域,因此如果按照公式(6)计算密度梯度,则需要获得至少7幅图像的灰度变化值。按照文献[5]中S.Price Cook提出的方法,认为N取7个时,一方面数据量很大,另一方面其它区域对图像灰度变化贡献量比较小,最终N的值取为3个,并对β的值在0.2~0.3之间反复进行优化选择,当该值取为0.3时计算得到的密度梯度值变化趋势与预计的变化趋势较为吻合。
根据上述建立的密度计算数学模型,当获得相邻的3个聚焦区域纹影图像后,就可以获得位于中心区域的流场密度值。
4 测试结果
为了快速地对多幅聚焦纹影图像进行密度值定量处理,编写了聚焦纹影图像密度值处理程序,该程序可以提取聚焦纹影图像的灰度变化、计算出系统的各个参数如急剧聚焦深度DS、输出对图像处理后的密度梯度和密度值等。
图5为0.6m激波风洞上获得的某一凹窗模型聚焦纹影图像,聚焦区域位于流场中心,来流马赫数为6.4,图6为该流场建立前获得的静态聚焦纹影图像。
根据两幅图像得到了图像灰度变化值,并进一步得到了测试区域流场的密度梯度值,如图7所示。图中X、Y坐标是以模型顶点为原点,代表模型的实际空间坐标值。同时假设模型的弓形激波外部为未扰动流场区域,该区域的流场密度通过试验条件各个参数可以计算出来,因此在根据密度梯度值计算扰动区域的流场密度时可以把该未扰动区域的密度值作为起点。在图7的基础上根据上述方法得到了图8所示的密度值分布,该密度值分布图未能全部显示图5中所有的区域,是因为在图5中右上角没有未扰动流场区域,在进行密度值计算时没有初始值,因此该区域的密度不能计算出来。
图5 在0.6m激波风洞上获得的凹窗模型聚焦纹影图像Fig.5 Focusing schlieren image of concavity window model gotten in the 0.6m shock tunnel

图6 在图5的试验条件下获得的静态流场聚焦纹影图像Fig.6 Focusing schlieren image of the static state flow at the same experiment condition as Fig.5
图7 由图5得到的密度梯度值Fig.7 Density gradients gotten by Fig.5
图8 由图7得到的密度值Fig.8 Density gotten by Fig.7
图9 为某凸窗模型的聚焦纹影图像,聚焦区域位于流场中心,图10为试验测量得到的密度值。图11为通过数值计算得到的密度值,但只是显示了图9中竖直线左边的区域。通过对图10和11的数据进行比较,在密度变化趋势上两者基本一致;通过试验和数值计算得到的密度最大值和未扰动区域的比值分别为2.76和2.68倍;对两者最小的密度值比较后,测量值要比数值计算值高8%。
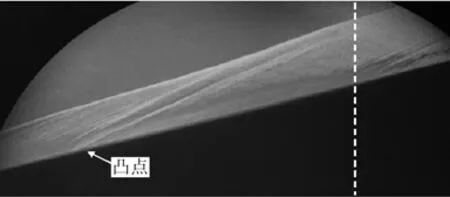
图9 在0.6m激波风洞上获得的凸窗模型聚焦纹影图像Fig.9 Focusing schlieren image of bay window model gotten in the 0.6m shock tunnel
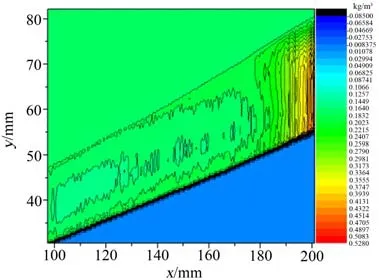
图10 由图9得到的密度值Fig.10 Density gotten by Fig.9
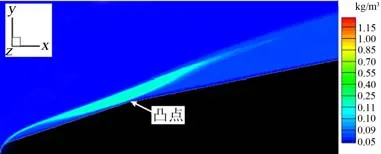
图11 在图9流场参数条件下的数值计算密度值Fig.11 Density of numerical simulation at the flow condition of Fig.9
本次试验结果和数值计算的变化规律一致性以及密度最大变化量比值的基本一致性,证实了通过聚焦纹影技术对密度场定量测量是可行的。
在数据处理中可能存在如下的误差因素:
(1)聚焦纹影系统的急剧聚焦深度DS和非急剧聚焦深度DU的计算值与实际值存在一定的差别,在数据处理时对该值提高了10%,但修正后的值也不一定能反映真实的聚焦深度值;
(2)数据处理时只是使用了3个相邻区域流场信息,其它区域的流场信息在某些地方影响可能很大,特别是非急剧聚焦深度处的激波和膨胀波;
(3)试验前获得的静态照片和试验中获得的动态照片可能受外界杂光的影响不一样,特别是流场存在一定的自发光。尽管在进行灰度变化计算时对亮暗度进行了修正调节,但如果杂光对图像的不同区域的影响不一样,该值就很难进行修正;
(4)试验照片的未扰动区域流场密度是经过理论计算得到的,但如果因其它原因导致来流场的不均匀性,则密度的起始位置值就带来了误差,该误差在数据处理时不能消除掉;
(5)在激波附近光束的变化导致图像可能过度曝光或不足,在数据处理时会引起一定的误差。本次试验中激波的密度和扰动前只相差几倍,图像不会造成过度曝光或不足。
上述误差源对整个密度测量的精度影响大小还需要在后续的工作中做进一步分析。
5 结论与展望
(1)通过聚焦纹影图像建立了密度场计算的数学模型,编写了数据处理程序,并在激波风洞上获得了测试结果;
(2)改变系统参数以降低急剧聚焦深度和非急剧聚焦深度;通过在流场不同区域放置标记,对某个区域成像以此判断急剧聚焦深度和非急剧聚焦深度,并把该值作为计算的依据。采用这两种方式后有望进一步提高测试精度;
(3)聚焦纹影技术作为流场密度测量的方法,使用比较简单,成本较低,可广泛运用于流场密度测试中。
致谢:作者感谢张志成研究员为本项工作开展提出的建设性建议,感谢梁杰研究员提供的数值计算结果。在试验中部绍清高级工程师、姜华工程师、王娣等同志给予了很多帮助,在此表示衷心的感谢。
[1] 范洁川等.流动显示与测量[M].北京:机械工业出版社,1997.
[2] 徐翔,谢爱民,吕志国,等.聚焦纹影显示技术在激波风洞的初步应用[J].实验流体力学,2009,23(3):75-79.
[3] WEINSTEIN L M.An improved large-field focusing schlieren system[R].AIAA-91-0567,1991.
[4] DOGGETT G P,CHOKANI N.A large-field laser holographic focusing schlieren system[R].AIAA-92-3936,1992.
[5] COOK SP,CHOKANI N.Quantitative results from the focusing schlieren technique[R].AIAA-93-0630,1993.
