基于RT-LAB的永磁同步电机硬件在环实时仿真平台的实现
2013-09-20邱华静李鸿彪邹毅军
邱华静,李鸿彪,邹毅军
(1.上海科梁信息工程有限公司,上海 200233;2.扬州大学能源与动力工程学院,江苏 扬州 225127)
0 引言
从上世纪八十年代开始,各工业发达国家竞相研究高性能的永磁同步电机。永磁同步电机具有体积小、质量轻、功率密度低、低速输出转矩大、效率高和维护简单等优点,受到工业自动化、新能源汽车等行业的青睐,成为研究与利用的热点[1]。
硬件在环(Hardware In The Loop,HIL)是实时仿真技术的一种新颖的工程应用形式,在工程实践中充分发挥了它的优势:置信度高、方便方案验证与设计、缩短开发周期、减小开发成本。本文实现了基于RT-LAB的永磁同步电机HIL实时仿真平台的搭建,基于此平台我们研究了永磁同步电机的运行特性,通过观察电流电压等电量特性确定了控制参数,验证了所用控制策略的性能,实验过程及结果证明了 HIL的优越性[2-3]。
1 基于RT-LAB的运动控制实时仿真平台
RT-LAB是加拿大Opal-rt公司开发的基于模型的仿真系统平台软件包,可以直接应用MATLAB/Simulink建立的动态数学模型应用于实时仿真、控制、测试及其他相关领域。基于RTLAB的PMSM HIL实时仿真平台将用MATLABSimulink设计的PMSM及RT-LAB库中的逆变器模型添加相关RT-LAB模块后,编译、下载到高精度实时仿真机eDRIVEsim中运行,即实现控制对象的建立。控制器采用TI的DSP开发套件F28335 eZdsp。
本仿真平台所用的eDRIVEsim仿真机是Opal-RT公司专为电机驱动与电力电子系统的各种HIL测试而开发的一款高精度实时仿真机。它集成了强大的Intel i7多核处理器,每个机箱配备多达12核计算单元;拥有专用电力电子模型库,高精度的实时解算算法,以及一系列高速I/O,所有I/O由Spartan 3 FPGA控制,I/O采样精度高达20 ns,FPGA片上仿真可达250 ns;配有高速低延迟模拟和数字I/O,带有信号调理;支持多种PCI和PCIe通讯接口卡;还包括一系列客户可定制的信号生成和信号处理模块,如PWM,正交编码器等。这些特点共同确保eDREIVEsim能满足电机控制与电力电子领域对高精度实时仿真的严格要求[4-5]。
基于RT-LAB的永磁同步电机硬件在环实时仿真平台结构由图1所示,在MATLABSimulink中设计PMSM与三相逆变器模型加上RT-LAB相关模块使之可以编译下载到eDRIVEsim仿真机中实时运行,通过eDRIVEsim的高速I/O与控制器(TI的DSP开发板eZdsp 28335)连接。控制器DSP28335采样电机电流、转速反馈信号与同样通过AD采样给定的速度信号比较执行DSP中运行的算法产生空间矢量脉宽调制波(SVPWM),经过OP5353数字IO卡输入eDRIVEsim中控制PMSM的运行。仿真机中OP5142 FPGA负责管理所有模拟数字量的板卡,高速采样的数据通过PCIe总线和CPU实时交互。
2 仿真机部分:PMSM本体与三相逆变器模型的建立
如图2建立了运行于eDRIVEsim仿真机中的PMSM本体与三相逆变器的模型,PMSM模型选用MATLABSimulink中提供的模型,逆变器为RT-LAB库中的模型。将电机测量模块(Machines Measurement Demux)测量的电机三相电流、电机转速、转子位置角经调理后输出到仿真机模拟量输出口OP5142EX1 Analo-gOut,RT-LAB中OP5142EX1 AnalogOut模块用于eDRIVEsim仿真机模拟量输出口的选择。将PMSM电流信号进行调理的目的在于满足所用DSP芯片AD采样信号必须满足0~3 V范围的要求,在实际调试时发现电流有漂移故在调理时也进行了校正。
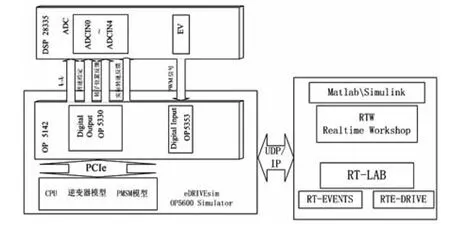
图1 基于RT-LAB的永磁同步电机硬件在环实时仿真平台系统结构
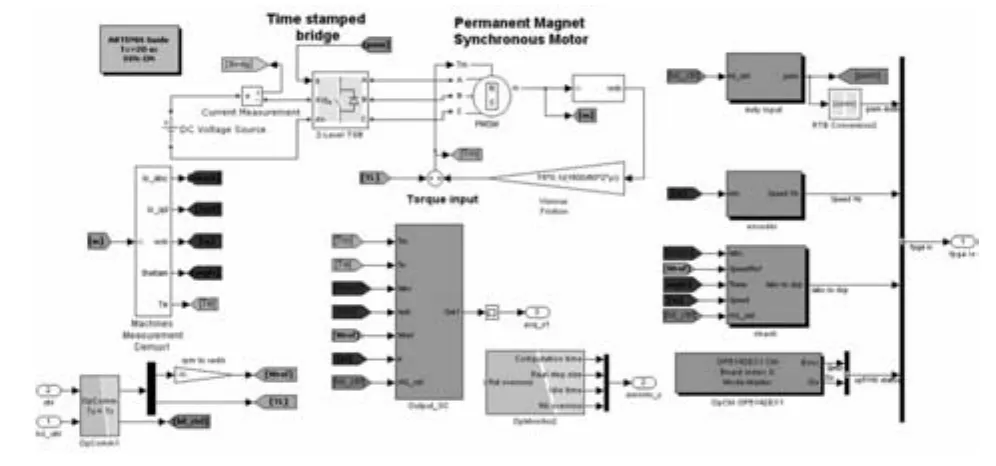
图2 仿真机部分:PMSM本体与三相逆变器模型
在本实验平台上选用由Opal-RT开发的RTE-Drive模块包下IGBT逆变桥模块,它针对于电力电子系统高频PWM波使用插值法以获得高精度。在MATLAB/SimPowerSystems(SPS)下的一个普通的交流电机驱动模型中我们将其中的逆变桥换为RTE-Drive IGBT逆变桥模块,使用RTE-Drive和SPS模块的电机驱动仿真电流波形效果分析如表1。
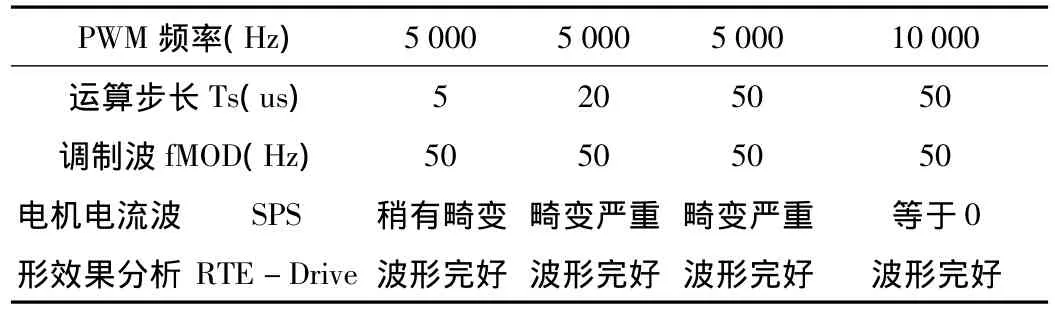
表1 使用RTE-Drive和SPS模块的电机驱动仿真电流波形效果比较
从以上对比可以看出经过优化的IGBT逆变桥模块可以使算法运行在更小的步长,实现更高的精度,非常适用于电机、电力电子等对步长要求严格的系统仿真。
3 PMSM磁场定向控制算法及其实现
为实现PMSM高性能的转矩控制,本实验平台采用采用矢量控制,也称为磁场定向控制,其原理框图如图3所示。矢量控制最基本的思想就是通过变换将交流异步电机能像直流他励电机那样能够独立控制励磁和转矩,得到优良的调速特性。矢量控制巧妙地通过坐标变换和旋转变换将三相交流电流变换成为二相(直轴的励磁分量和交轴的转矩分量)恒定的电流,这样使电流内环(PID)控制成为可能,控制器输出再通过反变换产生控制信号作为SVPWM的输入,而SVPWM和逆变器产生驱动电机旋转的变频变压电源。这样交流电机也像直流电机那样可以引入双环、三环控制大大提高了交流电机的速度、位置控制性能,使交流电机变速传动进入新的纪元[6]。
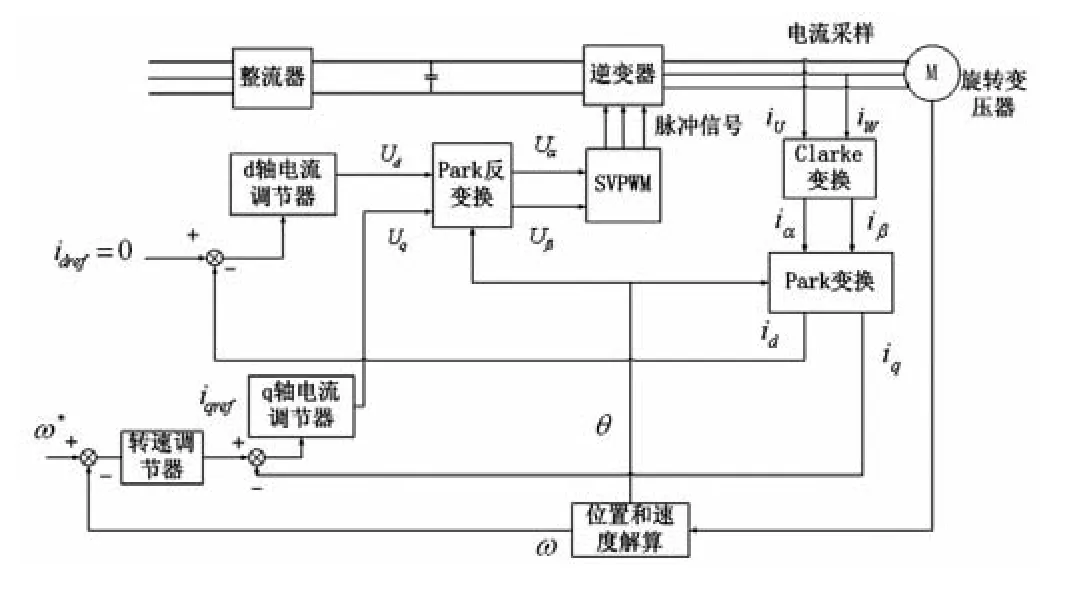
图3 空间电压矢量控制详细框图
随着控制模型的日益复杂,电子系统的日益庞大,传统的手工编写代码的方式已不能适应超大代码量工程的实现,因此基于模型的设计方法在世界范围内迅猛发展。不断更新的MATLAB软件具有强大的工具库,以适应基于模型的图形化设计方法的需求。在本实验平台中我们实现了基于模型的PMSM磁场定向(FOC)控制算法的TI C2000 DSP代码生成,控制模型如图4所示。
控制算法模型中使用MATLABTarget Support Package集成的TI的c2000 DSP寄存器设置模块ADC、SCI、ePWM等,图形化的交互界面使得用户方便的设置DSP各个寄存器。同时采用TI与MATH WORKS公司合作开发的电机控制模块,包括:CLARKE、PARK、反PARK、PID等模块,优化了资源占用量,提高了执行效率。
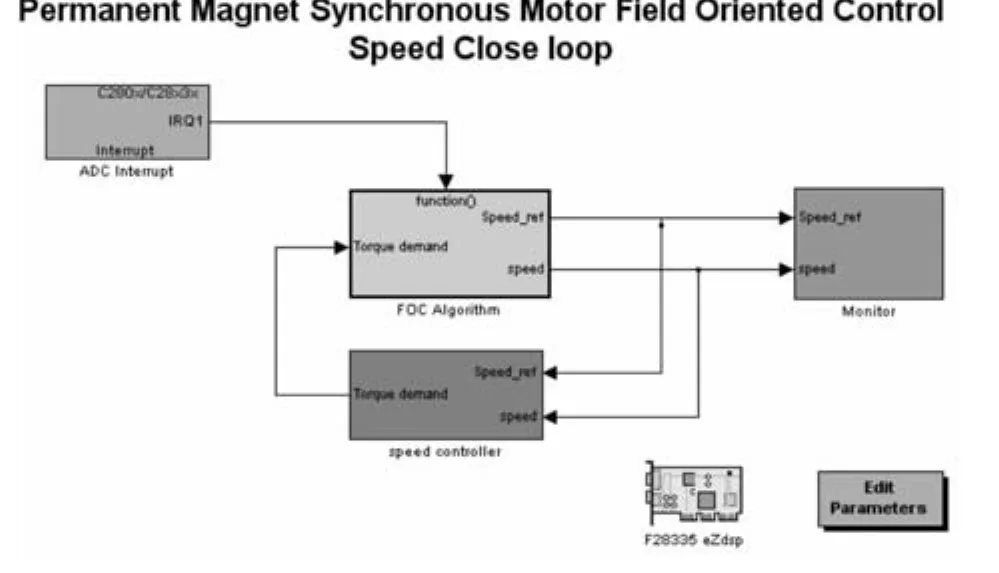
图4PMSM FOC算法模型
实践证明,基于MATLAB的TI c2000 DSP控制算法建模的代码生成方法使得对PMSM的研究可以集中精力于算法的革新与参数的调试上而不再在代码的编写上投入大量精力。
4 仿真结果
在完成平台软硬件设计、调试后,做了负载转矩不变,改变转速给定;给定转速不变,改变转矩给定的实验。
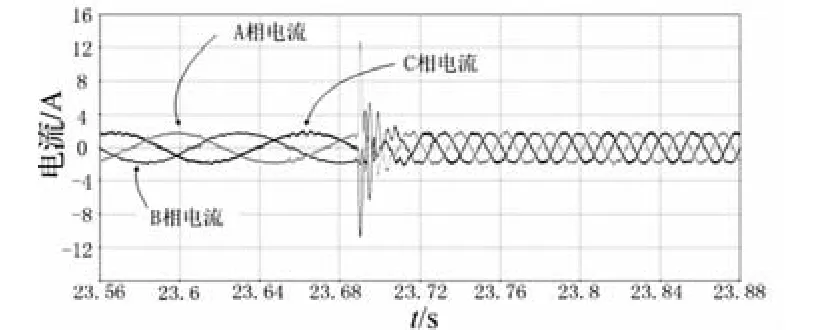
图8 转速从-150RPM升至+750RPM三相电流波形
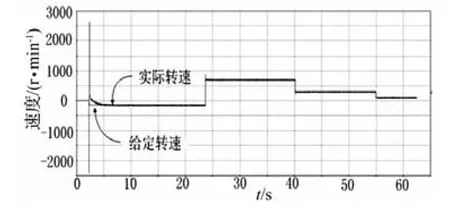
图5 转速跟踪给定转速情况
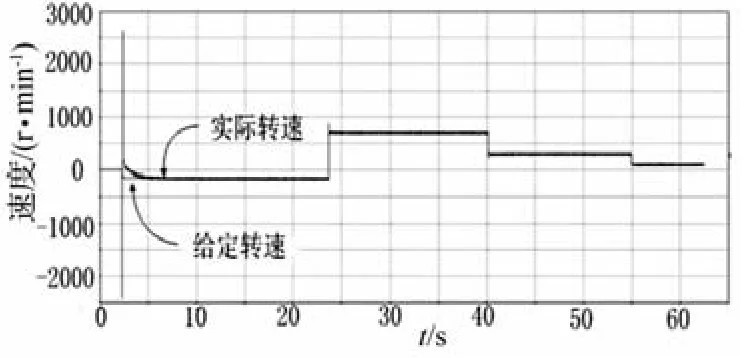
图6 转速给定由-150RPM改为+750RPM实际转速跟踪给定转速过程
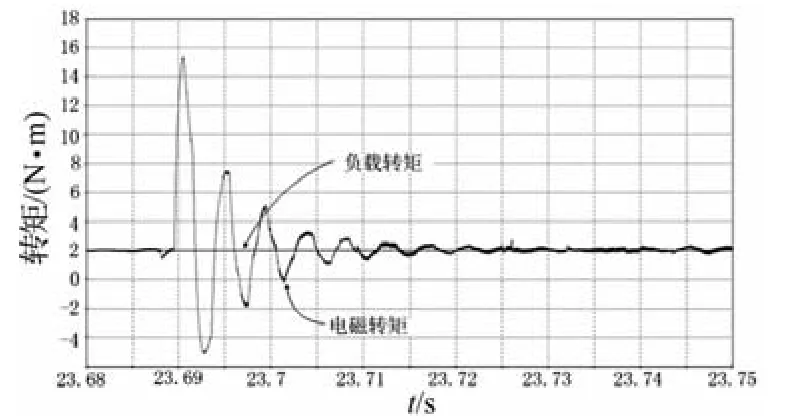
图7 转速给定由-150RPM改为+750RPM时刻电磁转矩瞬时变化情况
由图5~图8可见,负载转矩不变、给定速度改变情况下的电机实际转速、电磁转矩变化、电流波形都可以清晰的呈现出来,电机实际转速跟踪给定转速,稳态时稳定的跟踪转速给定值。
5 结束语
本文设计了一种基于RT-LAB的硬件在环实时仿真平台,并通过实现永磁同步电机的磁场定向控制来验证了HIL实时仿真的优异性能,同时生成了经过控制器在环实时仿真验证的DSP代码。
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2008.242-253.
[2]王坚.电力电子硬件在回路仿真技术的探讨[J].大功率变流技术,2011,2:1 -5.
[3]张卫丰,余岳辉.基于RTW的SVPWM DSP控制系统[J].电工技术学报,2007,3:102 -106.
[4] M.Harakawa,H.Yamasaki,T.Nagano,S.Abourida,C.Dufour and J.Belanger,Real-time simulation of a complete PMSM drive at 10us time step,Proceedings of the 2005 international power electronics conference(IPEC2005)[C].Niigata,Japan,2005.
[5] M.Hong,Y.Miura,T.Ise,Y.Sato,T.Momose and C.Dufour.Stability and accuracy analysis of power hardware-in-the-loop simulation of inductor coupled systems[J].IEEJ Trans,2010,130(7):902 -912.
[6]王成元.现代电机控制技术[M].北京:机械工业出版社,2006.
