一种地震预警监测传感器模块的设计及实现①
2013-09-06许川佩梁光发吴玉龙
许川佩,梁光发,吴玉龙
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
0 引言
随着科技的进步、经济的快速发展和社会的不断进步,社会公众对地震监测及地震预警提出了越来越高的要求。为了达到减轻地震灾害的目的,美国、日本、墨西哥和我国台湾等地区都已经建立了相应的地震预警系统,并且在实际的应用中都取得了很多成功的经验[1-2]。近年来,我国在地震预警技术方面也展开了相应的研究和实验工作。
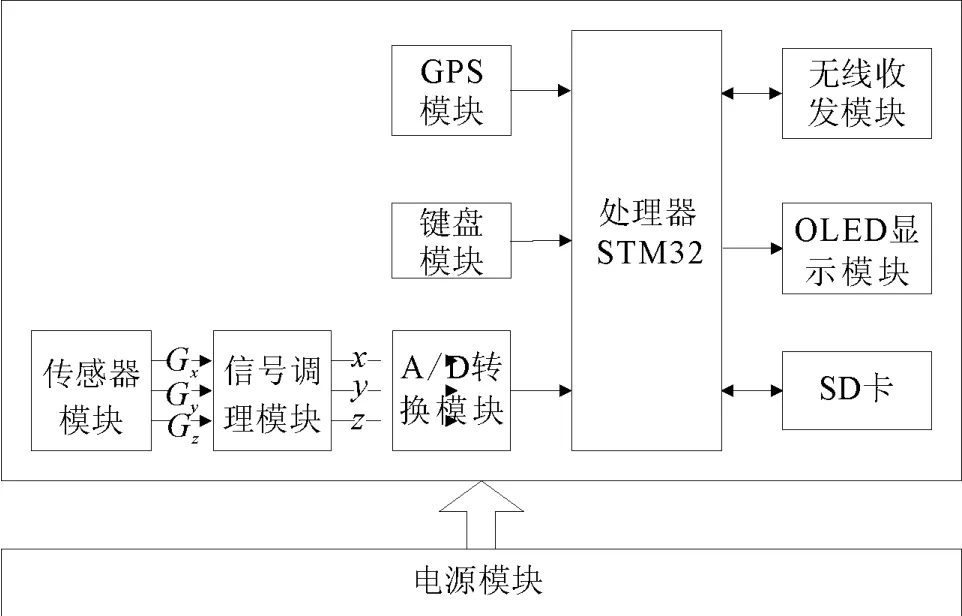
图1 地震监测传感器模块的系统结构图Fig.1 System structure of seismic monitoring sensor module
目前的地震预警系统基本都是建立在地震监测台网的基础上,利用台网确定震级并进行地震定位,因此其准确性依赖于台网台站的密度。增加台网密度会花费大量的人力、物力、财力,同时还存在台站系统的复杂性和网络脆弱性的问题。在此背景下,本文设计了一种多通道、高精度、适合野外使用、低成本而且简单实用的地震监测传感器模块,该传感器模块是地震预警系统的前提及基础。在该模块的硬件基础上,结合相应地震加速度数据处理的算法,探讨了仅用单台地震监测传感器模块快速测定地震基本参数的可能性。本方法可为缺乏有效的、高密度的地震监测台网的地区提供地震预警,达到防震减灾的目的。
1 传感器模块的工作原理及设计
1.1 传感器模块的工作原理
按照传播方式的不同,地震波主要有两种类型,即纵波和横波。其中纵波(P波)在地壳中传播速度为5.5~7km/s,它最先从震中向外扩散,使地面上下震动,破坏性较弱;而横波(S波)在地壳中的传播速度为3.2~4km/s,使地面发生前后、左右抖动,破坏性较强。本模块的工作原理就是利用破坏性较弱P波传播速度大于破坏性较强的S波这一特点[3]。当地震发生后,P波最先传播至地震监测点,而且当其振幅超过预先设定的触发阈值时,系统马上开始处理触发后(即P波到后)前3s三个方向(东西、南北、竖直)的加速度数据,结合相应的算法,在破坏性较强的S波到来之前计算出本次记录到的地震的震源距、震级、震中方位角,并且发出警报,以达到地震预警的目的。
1.2 传感器模块的设计
自然地震信号的频率大多都在100Hz以下,一般的地震加速度监测要求能同时对地面监测点的三个方向(东西、南北和竖直方向)进行监测,每个方向加速度监测动态范围至少为±2g,能分辨的加速度要求小于1gal(1g=1 000gal)。
基于以上地震监测要求,本文以ST公司的STM32F103RET6单片机为核心及其外围元件组成地震监测传感器模块硬件系统(图1)。其中传感器模块主要包括三轴加速度传感器LIS344ALH,负责感应由地震引起的地面振动,并将地面振动的加速度以电压的形式输出,其频率响应为1.8kHz,量程为用户可选的±2g/±6g量程,能达到包含自然地震信号的频率范围(0~100Hz)、3通道加速度输出及至少±2g(此时灵敏度为660mV/g,电压输出范围为158.4~3128.4mV)加速度量程的地震监测要求;信号调理及A/D转换模块包括用于信号调理的运放OPA4350及用于A/D转换的ADS8331,负责将传感器模块输出的加速度数字化,并且将其送到微控制器模块实时处理,其中A/D拥有16位分辨率,采用4.096V参考电压,能分辨的电压为

能达到加速度传感器感应1gal(相应的输出电压为0.66mV)的转换要求;GPS模块负责地震监测点经纬度的确定及对系统时钟的授时;OLED显示模块用于人机交互的显示窗口;无线收发模块用于和其他监测模块或是主机进行无线通信;键盘模块用于显示屏幕切换及无线收发数据的控制;SD卡模块负责将地震事件中系统采集到的加速度数据以文件形式存储起来,供后期研究;微控制器是本模块的核心,负责控制整个地震监测传感器模块的操作,处理并存储采集到的数据,利用采集到的加速度结合相应的算法,快速计算出地震参数(方位角、震源距、震级)。
2 软件设计
主程序流程图如图2所示,通过本模块的软件设计,使其能自动捡拾P波的到时,然后利用P波到后前3s加速度数据确定地震的震级、震源距、方位角,并发出警告。软件设计主要包括以下4大部分:长短时平均比方法(STA/LTA)自动检测P波,地震方位角估计,震级估计,震源距估计。
2.1 长短时平均比方法自动检测P波
长短时平均比方法是一种传统的,而且是目前使用仍然最为广泛的单台自动识别震相的方法,它既可以判断有无地震事件,又可以检测并记录震相的到时[4]。其主要原理是:
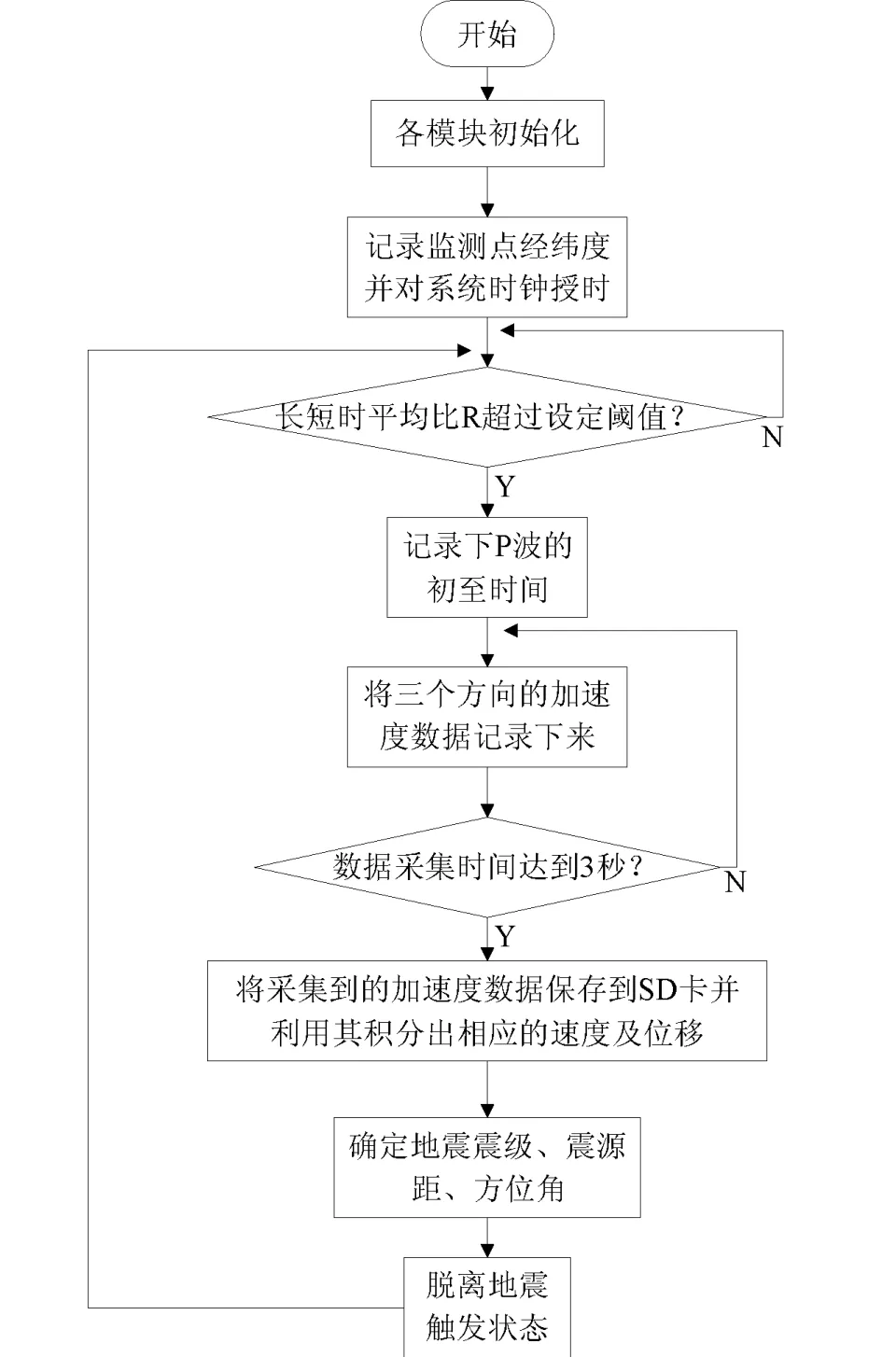
图2 主程序流程图Fig.2 Main program flowchart
先确定一个滑动的长时间窗,然后在此窗口内再取一个短的时间窗,最后计算短时间窗平均值和长时间窗平均值的比值R,通过判断R值是否超过预先设定的阈值K来判断有无地震事件,当R值超过预先设定的阈值时则判断其为地震事件,并且记录下该点的时间作为地震初至波的到时。长短时平均比的计算公式如下:
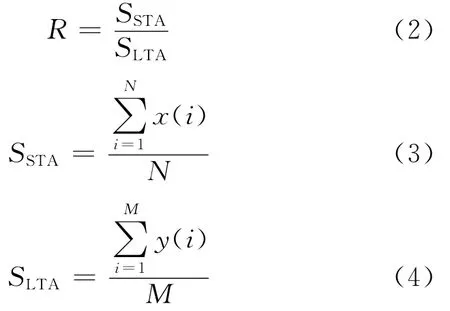
其中SSTA是短时间窗内的平均值;SLTA是长时间窗内的平均值;x(i)(i=1,2,…,N)表示短时间窗内数据;y(j)(j=1,2,…,M)表示长时间窗内数据;M和N分别表示长、短时间窗内的样本数。为了达到快速计算比值R的目的,本文选择的长、短窗内x(i)和y(i)是i时刻加速度数据振幅的绝对值。
2.2 地震方位角估计
地震台的震中方位角,是过地震台的子午线与台站到震中的连线之间的夹角 ,规定按顺时针方向计算[5]。本文测定地震方位角的方法是首先利用如表1所示的关系表确定震中方位。然后由P波三分向初动位移确定震中方位角,具体方法是由P波到后的数据计算出P波在东西、南北两个方向的初动位移A东西、A南北,再由tanα′=A东西/A南北求出α′。最后根据表1确定的震中方位及表2求出方位角。
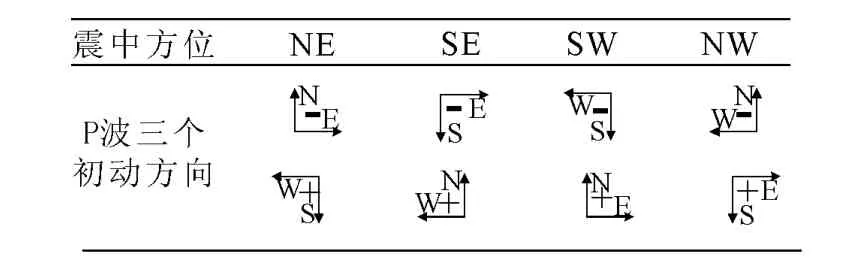
表1 P波初动方向与震中方位关系表Table 1 Relation of P-wave first move direction and epicenter orientation
传统的单台估计震中方位角就是用这种方法,但该方法中P波的初动方向及初动位移存在一定的偏差,因此计算出来的方位角误差会较大,针对这一情况,本文作了一些改进,就是使用P波到后的前10组三分量初动数据连续计算10个方位角 ,最终结果取平均值,以达到减小误差的目的。

表2 震中方位角确定表Table 2 Determining of epicenter azimuth
2.3 震级估计
目前用于地震预警确定震级的方法主要有与周期相关的τc方法、τmaxp方法,与幅值相关的ML10方法、Pd方法以及日本紧急地震速报系统中采用的震级计算方 法[6]。本 设 计 采 用 的 是 Kanamori[7]于2005年提出并改进后的特征周期计算方法,即τc方法,该方法的原理是利用地震监测传感器模块计算得到特征周期τc,然后利用特征周期τc和震级MW之间的经验公式确定地震震级。特征周期τc的定义如下:
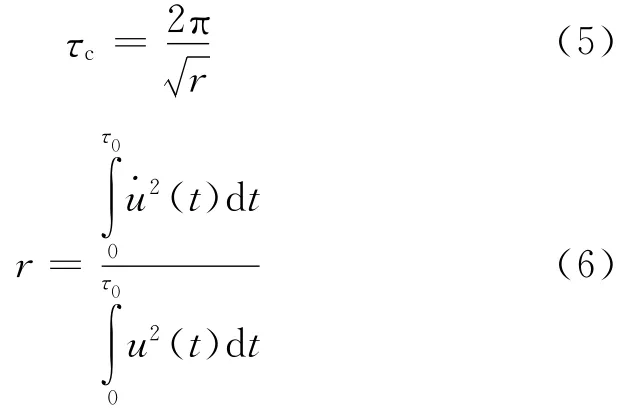
其中u(t)及˙u(t)分别为竖直方向地面运动的位移(通过对加速度数据的两次积分得到)及速度(通过对加速度数据的一次积分得到),积分区间[0,τ0]为从台站触发后开始的τ0时间。根据Kanamori等人研究得出的结论,建议 的取值为3s,也就是P波到后的前3s。
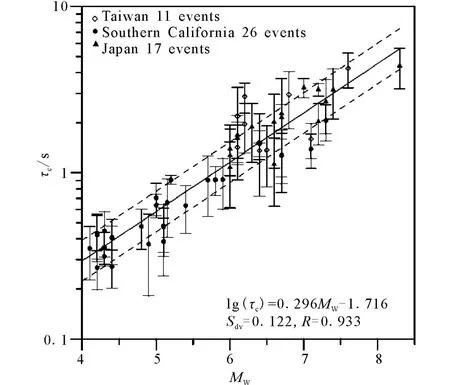
图3 特征周期τc与震级的关系[8]Fig.3 Relation between characteristic period and magnitude[8]
台湾Wu[8]的研究表明,在不同的地区得到的τc值差异性比较小,其利用台湾、南加州以及日本等三个地区的54个地震记录(如图3所示)统计得到如下关系:

2.4 震源距估计
参考日本UrEDAS系统数据处理的过程,通过实时监测单个观测点处的地面运动,在P波到达后的前3s时间窗内,首先基于P波的特征周期确定震级,同时也计算出3s时间内地震波的振幅(Pd),也就是最大位移,然后再通过一个包含震级、震源距和振幅的经验公式确定震源距[1,10]。
Wu等[9]的研究表明,不同震级的地震波中地震振幅(Pd)与震源距(R)的增加存在一定的衰减关系。Wu利用台湾一个台站记录到的46个不同震级的地震波确定了地震波振幅(Pd)随震源距(R)的增加有如下衰减关系(图4):

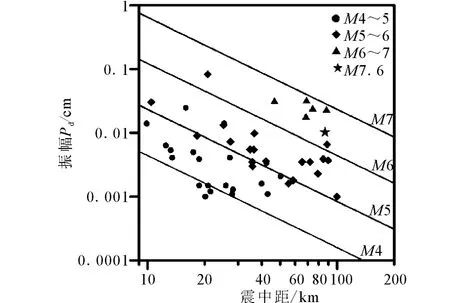
图4 不同震级的地震波振幅(Pd)随震源距(R)的衰减关系[9]Fig.4 Attenuation relation between amplitude and hypocentral distance for different magnitudes[9]
3 测试结果
由于本文计算震级、震源距时用到的速度及位移数据均是由采集到的加速度通过积分运算得到,因此本文通过测量位移数据的偏差来估计由经验公式计算得到震级、震源距的可行性。通过让传感器监测模块沿着任意一轴方向来回快速运动,传感器监测模块测量其最大位移。如图5所示,传感器模块沿竖直方向上下快速运动,以此模拟地震P波引起的地面上下振动,当系统处于触发状态后测量该状态下前3s的最大位移,测试结果如图6所示。可以看出,测量得到的位移与实际位移比较,偏差小于5mm。
图5 位移测试实验Fig.5 Displacemnt measurement
由于震级及震源距均是通过两个统计关系计算得到,其本身存在震级±0.412级、震源距±1.59 km的误差。同时,这两个统计关系中用到的地震记录来自我国台湾、美国南加州以及日本三个地区,因此,在具体的使用时可根据本地区以往的地震记录来优化该统计关系,以此提高地震预警的有效性。
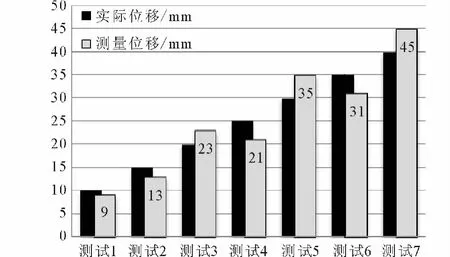
图6 位移比较Fig.6 Displacement comparison
测试方位角时,使传感器监测模块上的标定方向和地理方向一致,然后分别从模块的不同角度(认为是实际的方位角)晃动模块使其触发,以此模拟地震波从该方向传播至地震监测点并使监测模块触发,最后经过模块的计算得出方位角。测试结果见表3。
由于长短时平均比方法自动检测地震事件存在一定的误触发率,因此本文通过在如图5所示的实验平台上随机制造一些轻微的抖动,以此模拟一些非地震事件引起的地面振动或是地球本身存在的脉动,最后观察记录该传感器模块是否触发,测试结果如表4所示。误触发主要是由短长时间窗窗长及触发地震事件的阈值K所决定的,短时间窗的窗长越短,对振动数据幅值变化就越灵敏,但相应的抗干扰能力就越弱;长时间窗的窗长越长,对微弱振动信号的检测能力就越强,但同时对一些干扰或噪声的反应就越迟钝;如果设定的阈值K过高,则会出现漏触发,若K值过小则会出现误触发,本文阈值的设定就是漏触发与误触发的一个折中。

表3 方位角的测试Table 3 Test of azimuth

表4 地震事件误触发的测试Table 4 The test of earthquake mistakenly trigger event
4 结论
测试表明,本文设计的传感器模块能利用采集到的地震P波到后前3s秒加速度数据计算出方位角、震级及震源距。由表3可以看到,计算出的方位角最大误差范围 ,平均误差11°,与较好的地震台站8.5°的平均误差[1]相比,本文测得的方位角平均误差偏大2.5°。该误差与图6测试的位移误差主要来自两个方面:一方面来自传感器模块本身的测量误差,这类误差可以通过进一步完善传感器模块的软硬件得到减小;另一方面来自模拟地震波引起地面振动的位移及实际方位角时带来的误差,该类误差可以通过更先进的实验设备或是更加合理的实验手段加以改善。最后,该传感器模块的加速度监测范围为±2g,最小能分辨地面1gal的加速度变化,能同时对地面东南、西北及竖直3个方向的加速度数据进行采集,每个通道的采样率为500Hz,能达到单台地震监测预警的要求,正常工作时功耗为350 mW,适合野外使用。
通过本文设计的地震监测传感器模块可以看到,仅用单台地震监测传感器模块快速测定地震基本参数是可行的。
(References)
[1] 黄媛,杨建思.用于地震预警系统中的快速地震定位方法综述[J].国际地震动态,2006,336(12):1-5.
HUANG Yuan,YANG Jian-si.Summarization of the Quick Earthquake Location Method on Earthquake Early Warning Systems[J].Recent Developments in World Seismology,2006,336(12):1-5.(in Chinese)
[2] 刘希强,孙亚强,赵冰,等.地震震中实时动态定位的方法研究[J].西北地震学报,2012,34(4):342-349.
LIU Xi-qiang,SUN Ya-qiang,ZHAO Bing,et al.Research on Real-time Evolutionary Earthquake Epicentral Location[J].Northwestern Seismological Journal,2012,34(4):342-349.(in Chinese)
[3] 李山有,金星,马强,等.地震预警系统与智能应急控制系统研究[J].世界地震工程,2004,20(4):21-26.
LI Shan-you,JIN Xing,MA Qiang,et al.Study on Earthquake Early Warning System and Intelligent Emergency Controlling System[J].World Earthquake Engineering,2004,20(4):21-26.(in Chinese)
[4] 刘希强,周彦文,曲均浩,等.应用单台垂向记录进行区域地震事件实时检测和直达P波初动自动识别[J].地震学报,2009,31(3):260-271.
LIU Xi-qiang,ZHOU Yan-wen,QU Jun-hao,et al.Real-time Detection of Regional Events and Automatic P-phase Identification from the Vertical Component of A Single Station Record[J].Acta Seismologica Sinica,2009,31(3):260-271.(in Chinese)
[5] 徐果明,周蕙兰,编著.地震学原理[M].北京:地震出版社,1991:314.
XU Guo-ming,ZHOU Hui-lan.Principles of Seismology[M].BeiJing,Earthquake Publishing House,1991:314.(in Chinese)
[6] 张红才,金星,李军,等.地震预警震级计算方法研究综述[J].地球物理学进展,2012,27(2):464-474.
ZHANG Hong-cai,JIN Xing,LI Jun,et al.Review on Magnitude Estimation Methods Applied to Earthquake Early Warning Systems[J].Progress in Geophysics,2012,27(2):464-474.(in Chinese)
[7] Kanamori H.Real-time Seismology and Earthquake Damage Mitigation[J].Annual Review of Earth and Planetary Science,2005,33:195-214.
[8] Wu Y M,Kanamori H.Development of an Earthquake Warning System Using Real-time Strong Motion Signals[J].sensor,2008,8(1):1-9.
[9] Yih-Min Wu,Hsin-Yi Yen,Li Zhso,et al.Magnitude Determination Using Initial P Waves:A Single-station Approach[J].Geophysical Research Letters,2006,33:L05306.
[10] 赵冰,刘希强.全球地震早期预警研究综述[J].西北地震学报,2011,33(4):392-402.
ZHAO Bing,LIU Xi-qiang.An Overview of Earthquake Early Warning Research around the World[J].Northwestern Seismological Journal,2011,33(4):392-402.(in Chinese)