基于UG/ADAMS的纯电动汽车底盘结构优化
2013-09-03兰天虹于亨通
史 业, 王 骞, 华 典, 兰天虹, 于亨通, 张 昕
(北京交通大学机械与电子控制工程学院,北京100044)
0 引言
电动车与传统发动机驱动汽车相比,在整车质量大小、能源提供形式、载荷分布、管线走向等多方面存在较大差异,同时也使电动车各部件的布置具有很大的灵活性。本文针对MICRO-哈利电动汽车进行底盘布置方案分析,该车采用轮毂电机,以驱动电机及车用动力电池组为动力源,取消了传统车辆的发动机动力总成及传动系统,整车质心位置及簧载质量均发生了变化,动力电池组由于体积大、质量重,其布置方式及位置对电动车操纵稳定性影响很大。为了使纯电动车辆底盘结构布置更加合理和紧凑,本文针对电动车的特殊性,从动力学优化分析方面着手,提出纯电动车底盘布置方案,将三维模型与动力学分析相结合,对三种动力电池组布置方案进行整车操纵稳定性对比分析,以获得最优方案。
1 UG模型建立
本文采用UG软件构建了MICRO-哈利电动汽车的底盘三维模型,该软件为一个交互式CAD/CAM(计算机辅助设计与计算机辅助制造)系统,它功能强大,可以轻松实现各种复杂实体及造型的建构。它在诞生之初主要基于工作站,但随着PC硬件的发展和个人用户的迅速增长,在PC上的应用取得了迅猛的增长,目前已经成为模具行业三维设计的一个主流应用。
以MICRO-哈利电动汽车为研究对象,获取整车技术参数、尺寸(几何定位)参数、力学特性参数(刚度、阻尼等特性),利用UG软件分别建立麦弗逊式前悬架,转向系,非独立式后悬架,轮胎三维模型,并组建整车三维模型,补充确定汽车各总成的质量、质心与转动惯量等质量特性参数,使后续模型动力学分析更为准确[1]。
建立UG仿真模型如图1~3所示。

图1 前悬架UG模

图2 后悬架UG模型
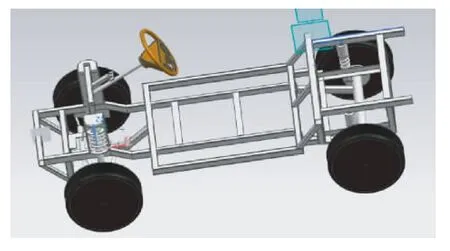
图3 整车UG模型
2 ADAMS整车虚拟样机仿真模型建立
本文在ADAMS/car模块中建立优化后的整车虚拟样机模型。
首先对车辆的各系统进行物理模型的抽象简化,悬架零部件中除了弹性元件,其余元件全部看成刚体,为分析问题的简便性,车身也看成刚体;获取各个系统的几何参数、质量参数、力学参数;建立转向系统、轮胎、麦弗逊式前独立悬架、后悬架以及车身虚拟样机的模板模型,再在标准模式下由模板模型建立子系统模型;分别建立各个子系统的通讯器接口;在ADAMS/Car中,通过通讯器把各个子系统装配起来,得到整车虚拟样机动力学仿真模型如图4[2-3]所示。电动车主要技术参数见表1。

图4 整车模型

表1 电动车主要技术参数
3 质心点调整实验方案
影响汽车操纵稳定性的因素有很多,前后轴质量和承载变化是其中重要因素。本试验中电动车体积较小,质量较轻,动力电池组的质量相对于整车总质量占有较大比例,可以通过调整电池布局来改变质心点,进而比较整车操纵稳定性。在此提出三种底盘布局方案,如图5所示。分别分析三种布局方案下的操纵稳定性,最后选出最优方案。

图5 三种布局方案
图中:方案1,后备箱2×1块电池,剩余两块电池对称摆放在底盘中部;方案2,后备箱2×2块电池,质心位于中轴,相比方案1质心点后移;方案3,电池2×2块对称摆放在底盘中部,相比方案1质心点前移。
通过ADAMS/Car的质量调节来调节整车虚拟仿真模型质心的前后位置。
4 不同质心点对操纵稳定性的影响
目前,各国采用的汽车操纵稳定性试验评价方法很多,常见的试验评价方法有转向瞬态响应试验(角脉冲输入试验)、转向瞬态响应试验(角阶跃输入试验)、稳态回转试验、转向回正试验、转向轻便性试验、蛇行试验[4]等。
4.1 转向瞬态响应仿真试验1
用转向盘转角脉冲输入瞬态响应试验评价汽车受到外来因素干扰时的反应。
虚拟车模型初始沿直线行驶,随后向转向盘输入一个三角脉冲转角。转向盘被扰动,随即迅速转回原位保持不变,直至虚拟车恢复直线行驶状态。输入三角脉冲的脉宽为0.3~0.5 s,最大转角应使过程中最大侧向加速度为4 m/s2,观测仿真过程虚拟车运动状态,结果如图6~8所示。

图6 方向盘转角与时间的关系

图7 侧向加速度与时间的关系
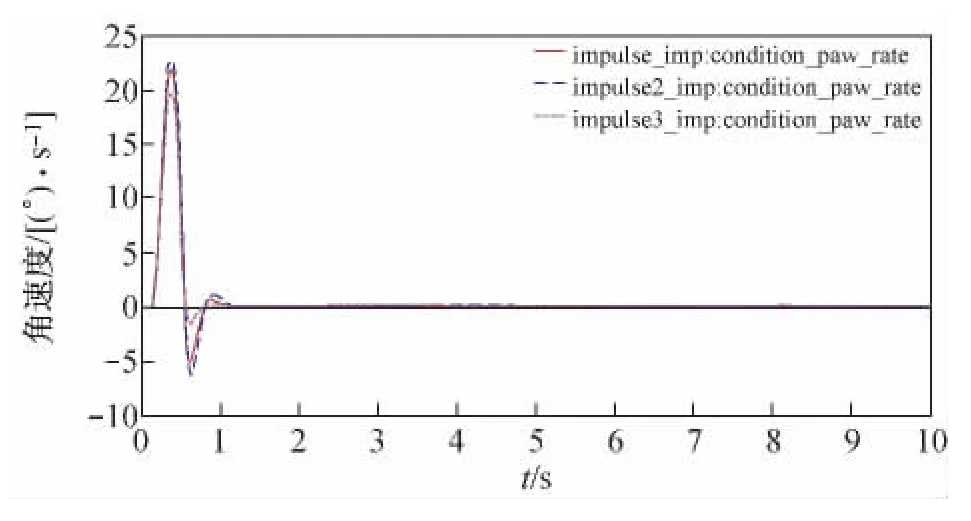
图8 横摆角速度与时间的关系
考虑操纵稳定性,希望共振时的增幅比小些,共振频率较高,以使不同工况下失真度较小,可以达到相对较好的操纵稳定性;并希望相位差小些,以保证汽车有快速灵活的反应[5]。从以上图中简单分析可以得出:对于峰值,方案3相对较低,其中横摆角速度与时间关系曲线较明显,侧向加速度峰值方案3较方案1要低4°/s左右,较方案2约低2.5°/s。对于共振频率与相位差,由图可看出:方案3达到波峰时间最短,故方案3共振频率较高。由横摆角速度图的第一个波峰所对应的时间点与转向盘转角变化图波峰对应的时间点比较可知:方案3对应时间值相差较小,故方案3相位差较小。因此方案3的操纵稳定性较方案1、2有所提高。
4.2 转向瞬态响应仿真试验2
用转向盘转角阶跃输入瞬态响应试验评价汽车转向灵敏度及整车随动性能。
虚拟车模型初始满载并沿直线行驶,随后在0.2 s时间内将方向盘从0°转到50°,随后方向盘转角不变并保持车速,观测仿真过程虚拟车运动状态[6],结果如图9~11所示。
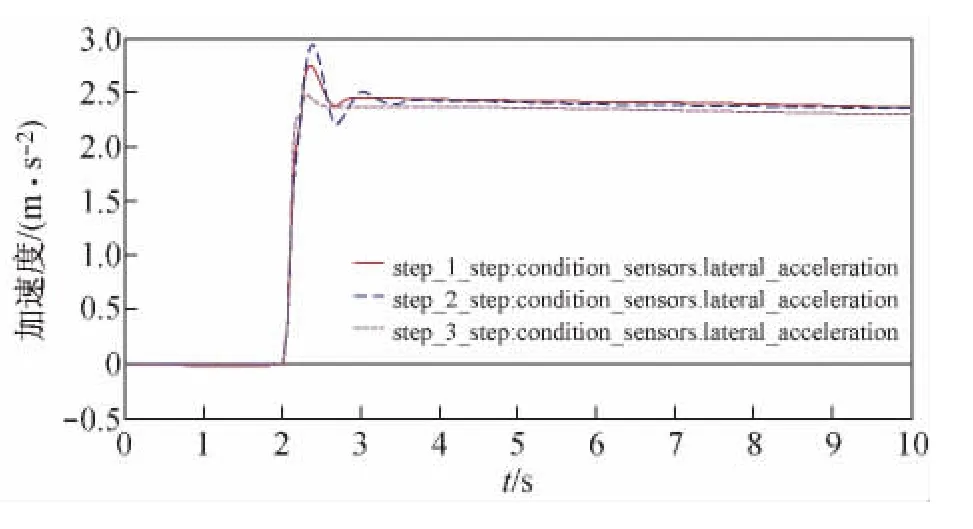
图9 侧向加速度与时间关系图

图10 横摆角速度与时间关系图

图11 方向盘转角与时间关系图
由仿真结果可以发现:方案3(质心前移)汽车的侧向加速度和横摆角速度峰值和稳态值都有所减小,同时响应时间也缩短,提高了汽车瞬态响应性能。方案1和方案2质心逐渐向后偏移,汽车的侧向加速度和横摆角速度峰值和稳态值都有所增加,同时响应时间也变长。因此,对于本车来说,质心位置适度前移有利于提高整车的操纵稳定性。
4.3 稳态回转仿真试验
试验在满载工况下进行,根据国标 GB /T6323.6-94,对虚拟车采用固定转向盘转角连续加速的方法进行稳态回转试验[7]。试验中首先使虚拟车以最低的稳定速度沿所画圆周行驶,达到稳定后固定方向盘转角,缓慢均匀加速至侧向加速度达到6.5g,或虽未达到此侧向加速度,但已达发动机功率最大值或虚拟车发生侧滑时为止,观测仿真全过程虚拟车运动状态,结果如图12所示。

图12 行驶半径与时间的关系
一般来说,汽车的稳态转向特性有不足转向、中性转向和转向过度[8]三种。从安全性,或者说操纵稳定性的角度看,适度的转向不足是比较好的选择,因为转向不足比较容易修正,且可以使车辆在较低的速度就能够进入衡定状态,当车辆发生转向不足时,车辆的转弯半径会增大,从而使得离心力减小,随着离心力的减小,地面附着力将有可能提供所需要的驱动力和离心力,从而使车辆趋于稳定转向。相反,如果发生了转向过度,则转弯半径变小,离心力会逐渐变大,会导致车辆进一步的转向过度,直至失控甩尾,后果非常严重。因此,对于车辆来说,都希望有适度的转向不足特性,这样可以有效地避免转向过度的情况,保证驾驶安全[9-12]。
由于轮胎与路面间的附着力是有限的。当转向时车辆产生的离心力和驱动力大于与地面附着力时,轮胎就会出现滑动。除了轮胎与路面特性的因素外,汽车质心点的分布对滑动形式的影响也是很大的。当滑动轮胎位于前轮,就会产生转向不足;而滑动轮胎位于后轮,则会产生转向过度[13-16]。
从图可见,三种布局方案下,虚拟车都具有一定的不足转向,随着侧向加速度的增加,汽车的转弯半径也随之增大,相对来说,方案3的不足转向更明显一点。
5 结语
本文在电动车总布置设计中,选取对质心点影响较大的电池布置问题,提出了三种方案,从影响安全的操纵稳定性角度,运用CADAMS/Car软件建立虚拟车仿真模型,进行不同状态下的模拟试验和分析,进而选择最优方案。由仿真实验结果可知,在原车型电池摆放位置基础上,质心点适量前移能够提高汽车的操纵稳定性。因此,针对电动汽车的特殊性,提出选择方案三进行底盘布置的优化。
[1] 刘向阳.UG建模、装配与制图(NX中文版)[M].北京:国防工业出版社,2008.
[2] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2008.
[3] 陈 军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2008.
[4] 房洪斌.基于ADAMS的纯电动客车建模及性能分析和结构改进[D].吉林:吉林大学,2009:13-23
[5] GB/T 6323.3—94汽车操纵稳定性试验方法:转向盘转角脉冲输入[S].北京:中国标准出版社,1994:2-6.
[6] GB/T 6323.2—94汽车操纵稳定性试验方法:转向盘转角阶跃输入[S].北京:中国标准出版社,1994:2-6.
[7] GB/T 6323.6—94汽车操纵稳定性试验方法:稳态回转试验[S].北京:中国标准出版社,1994:2-6.
[8] 王 强,苏小平.基于ADAMS/Car某客车操纵稳定性的仿真与分析[J].机械制造与设计,2011,249(11):163-165.
[9] 张伯俊,金永兴.基于ADAMS/Car的纯电动高空作业车操纵稳定性仿真研究[J].制造业信息化,2010(8):55-57.
[10] 李 颂,明 磊,张 莉.某轿车整车虚拟样机模型的操纵稳定性建模与仿真试验[J].工程与试验,2009(3):22-24
[11] 郭宽友.汽车操纵稳定性的影响因素及评价方法研究[J].重庆工学院学报(自然科学版),2007,21(7):54-56.
[12] 程 源,张 翼,李 鹏,等.基于ADAMS的汽车操纵稳定性仿真试验研究[J].公路与汽运,2011(3):7-9.
[13] 温炜坚,余少敏,廖中文,等.基于操纵稳定性的某电动汽车底盘布置方案优化[J].重庆理工大学学报(自然科学),2010,24(9):19-23.
[14] 钟文彬,周林杰.纯电动乘用车总布置设计研究[J].上海汽车,2010(8):3-7.
[15] 李 楠,何 仁,蒋 洪,等.动力电池布置对电动公交客车制动性能的影响分析[J].机械设计与制造,2012(8):215-217.
[16] 朱 晖,张逸成,朱昌平,等.电动汽车电池组热管理系统的研究[J].实验室研究与探索,2011(6):8-10.
