离散三维激光点云的点阵化输出方法研究
2013-08-20李忠富
李忠富
(安徽省交通勘察设计院有限公司,安徽合肥 230009)
三维激光扫描技术是一种新近发展起来的获取空间三维信息的全新扫描技术,又称实景复制技术。三维激光扫描技术与其他信息获取方法互相结合和补充,为诸多领域开辟了新的发展空间和思路,推动了原有应用领域的不断进步,同时也带来了新的挑战。近年来,三维激光扫描技术在文物保护方面、三维模型的重建工作以及工程施工过程中的质量监测和控制等领域得到了较多的应用,取得了一定的进展,给传统的测绘领域带来了新的机遇和挑战。三维激光扫描技术被誉为是继GPS技术以来测绘领域的又一次技术革新。本文分析了三维激光扫描的基本原理,探讨了基于离散云的三维重建和点云数据的点阵化处理方法,并通过实例分析和证实了其有效性。
1 三维激光扫描基本原理
三维激光扫描仪是一种通过激光测距原理,瞬时测得物体的空间三维坐标值的测量仪器,主要由激光扫描系统及其附带的CCD数字摄影系统、配套的软件和内部校正系统所构成。目前,地面三维激光扫描仪通常采用TOF脉冲测距法,这是一种高速激光测时、测距方法,三维激光点P(XP,YP,ZP)坐标计算方法如式(1)所示。三维激光扫描测量仪器的工作原理及其内部坐标系,如图1,图2所示。

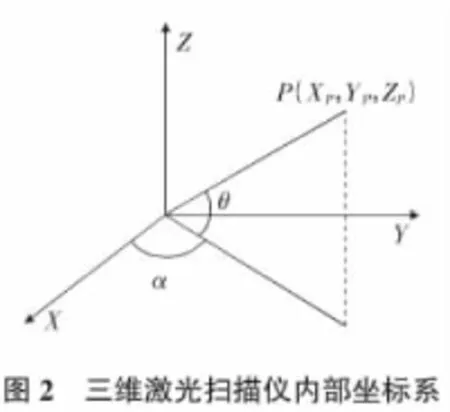

其中,S为测距观测值;α为每个激光脉冲横向扫描角度观测值;θ为纵向扫描角度观测值。
2 基于离散点云的三维重建
基于三维离散点云的三维重建流程具体包括数据预处理、离散点云的三角化(构建三角网格模型)以及三角网格的渲染三个部分。
2.1 数据预处理
首先,必须进行数据预处理,这是三维重建技术的基础。三维扫描过程中,不仅外界环境因素对扫描实体存在阻挡和遮掩等影响,扫描实体本身亦可能存在不均匀的反射特性,这些均会影响最终扫描结果。因此,需要选择合适的过滤算法来对点云进行过滤,剔除其中含有的不稳定点与错误点。
2.2 离散点云的三角化
通常得到的三维数据一般都是离散、复杂的三维点云,因此直接显示在屏幕上,无法得到重建物体的表面。因此需要对点云进行三角化,重建结果为一张与原物体表面拓扑等价的三角形网格。
2.3 三角网格的渲染
经过前述两个过程的处理,可以得到真实物体的三角网格图形。一般的,三角网格基本能正确反映离散点间的拓扑关系。为了真实再现物体的表面,还需对模仿真实场景进行光照处理,将颜色信息和材质信息等赋予三角化网格的各个顶点,从而绘制出具有真实色彩的三维模型。
3 点云数据的点阵化处理
地面三维激光扫描获得的数据是目标物体的三维点云,这与传统摄影测量和遥感处理的数字图像是不同的。离散的点云数据并不能够真实准确地表达建筑物的整体模型,点云中点的组织是无固定顺序的,即调换两个点的存放次序,点云曲面不会改变。为了满足建筑物三维建模的需求,首先要对所获得的原始无序点云数据进行处理,建立起点云之间的拓扑关系。因此点云数据的表达和空间拓扑结构将直接影响着数据处理算法的可行性和效率。
3.1 点云数据的组织形式
三维激光扫描仪扫描文件是非公开格式,无法直接读取操作,只能通过配套软件导出ASC格式。ASC文件由扫描点的三维坐标、激光反射强度和颜色信息构成,点的表现形式为(X,Y,Z,I,R,G,B)。
*.PTX文件与ASC文件相同的是文件中包含三维坐标、激光反射强度和颜色信息。不同的是点云数据按照本身的空间排列次序排放,点云之间拓扑关系比较明确,包含数据的点的行数和列数、配准参数(旋转矩阵、平移向量以及全局变换矩阵)等,同时文件中也以(0,0,0)的形式保存了一些扫描废点信息,文件如图3所示。
因此,将原始点云的ASC格式转换成PTX格式,对于后续的数据配准和建模有着直接的意义。
3.2 点云数据的点阵化输出
从测站观察时,目标点云客观上呈点阵状,当用扫描仪内部坐标系表示空间点位置时,点云中表示水平和垂直的角度为顺序增加或减小,且与点序关系相符。因此,只要将点云按行列号(i,j)输出,即可完成点云的点阵化处理。

根据三维激光扫描的基本原理,可以将三维激光点云映射到由横向扫描角α、纵向扫描角θ构成的坐标系中(α∈(0,2π),θ∈( -π/2,π/2)),如式(2)所示。

将三维激光点云沿α,θ轴以Δα,Δθ等角展开,如式(3)所示,生成M行N列的二维矩阵,之后按式(4)确立三维点云所在的行列号:

其中,M为点云的总行数;N为点云的总列数;i为扫描点在矩阵中的行号;j为扫描点在矩阵中的列号。
三维激光扫描仪扫描文件一般为ASC文件,该文件中并无扫描时横向与纵向扫描角度间距Δα,Δθ。因此如何计算测站扫描时横向与纵向扫描角度间距是求得扫描时点云所在行列号的关键,此间距类似于采样间距。
设横向扫描间距与纵向扫描间距比为:
ΔH∶ΔV=a∶b(ΔH,ΔV分别为横向与纵向扫描间距) (5)每个点占面积为 Δα ×Δθ,总面积依旧为(αmax- αmin)(θmaxθmin),则:

又根据比例关系:

由此可得:

因此,将式(8)代入式(3)和式(4)中,即可求得各扫描点的行列号。通过以上的点云数据处理方法就可以精确地描述其散乱点云的拓扑关系。
4 实验与分析
使用Trimble GX扫描仪对某实验室的墙角分别进行了扫描,墙角的横向扫描间距10mm和纵向扫描间距为20mm,扫描距离为4.809m,扫描时间为60s,共3089个点,初始点云数据用软件PointScape打开,如图4所示。利用VC++平台将实验数据进行点阵化处理,并输出成PTX格式文件,最后通过专业三维建模软件建立三角网格,如图5所示。


从图5中可以看出三角网格的总体效果比较好,直观的反映出点云在空间位置上的变化。而个别扫描点缺失造成的原因可能是扫描仪自身的误差、该扫描点的反射率低、算法的舍入误差等,实验表明该算法对不等分辨率的三维点云的点阵化是有效的。
5 结语
地面三维激光扫描技术具有获取数据速度快、自动化程度高、操作简单、作业时间短等优点,在工程中不断得到应用。本文总结分析了三维激光扫描技术的工作原理,提出了散乱点云数据的点阵化算法,通过将三维点云进行二维化处理,并按点云的行列号输出,比较有效地建立起点云之间的拓扑关系,进而生成三维网格模型,并通过实验进行了验证,为后续的点云配准与三维建模工作奠定了基础。
[1]李清泉,杨必胜,史文中,等.三维空间数据的实时获取、建模与可视化[M].武汉:武汉大学出版社,2003.
[2]马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[3]张 毅.地面三维激光扫描点云数据处理方法研究[D].武汉:武汉大学,2008.
[4]潘建刚.基于激光扫描数据的三维重建关键技术研究[D].北京:首都师范大学,2005.
[5]王潇潇.地面三维激光扫描建模及其在建筑物测绘中的应用[D].长沙:中南大学,2010.
