基于计算机图像定位的伺服平台研究
2013-08-20聂华
聂华
(陕西职业技术学院 陕西 西安 710100)
计算机视觉是指用计算机实现人视觉的某些功能,其最终目标是对三维客观世界的理解[1]。计算机视觉作为当今最为活跃和富有挑战意义的研究领域,其研究内容和应用领域是相当广泛的。
它是工业自动化、机器人智能化、自主导航、目标跟踪、工业检测及军事武器应用的核心技术之一。计算机视觉的开创性工作从20世纪60年代中期开始。以美国MIT的Robert把二维图像分析推广至三维实体景物分析,标志着计算机立体视觉技术的诞生,并在随后的20年内发展成为一门新的学科。特别是20世纪70年代末,Marr等创立的计算机视觉理论框架对计算机视觉发展产生了巨大影响,已经形成了从图像获取到景物表面重建的完整体系[2]。而高精度的实时跟随伺服性能就需要有灵敏性高的传感器和可靠性高的跟随性稳定伺服电路作为支撑。经实验可验证将高精度三轴陀螺仪引入到伺服平台,可以达到伺服平台对特定目标图像的精确跟随。
1 计算机图像定位原理
要确定空间某目标的位置,需要参考坐标系,那么可以通过计算机对摄像机获得的该目标图像进行处理,得到该目标的位置和距离,如图1所示。
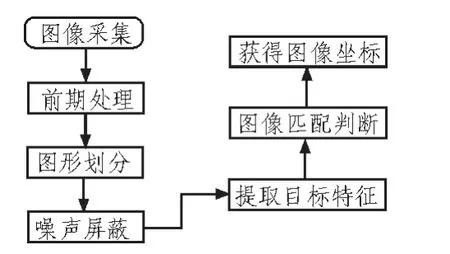
图1 图像处理工作流程Fig.1 Workflow of Image processing
摄像机成像的图像是由M×N个点组成,图像中的每个元素称为像素,每个像素点的大小就形成了灰度或亮度。摄像机的成像是由针孔模型为基础,通过透视投影将三维空间的景物映射到二维像素矩阵中的灰度值来形成。成像过程的坐标变换可以通过4个坐标系的3次转换来表征,这4个坐标系分别为:
1)环境坐标系(X,Y,Z):根据具体环境的特点选定,用于表达目标的绝对图像坐标。
2)摄影坐标系(Xs,Ys,Zs):以摄像机 O 点位坐标原点,X,Y轴分别和感光元件平面的两条垂直边平行,Z轴和摄像机光轴重合。
3)图像坐标系(X,Y):表示目标在图像平面上的投影,坐标系原点在感光元件图像平面中心,X,Y轴分别平行于平面的两条垂直边。
4)像素坐标系(u,v):表示图像阵列中图像像素的位置,坐标原点O在感光元件的图像平面的左上角,U、V轴分别平行于图像平面的X、Y轴,坐标值为离散型的整数值。
摄像机标定中最简单的线性模型称为针孔模型,空间任意一点P在图像上投影点p,摄像机坐标系和世界坐标系之间的关系如图2。
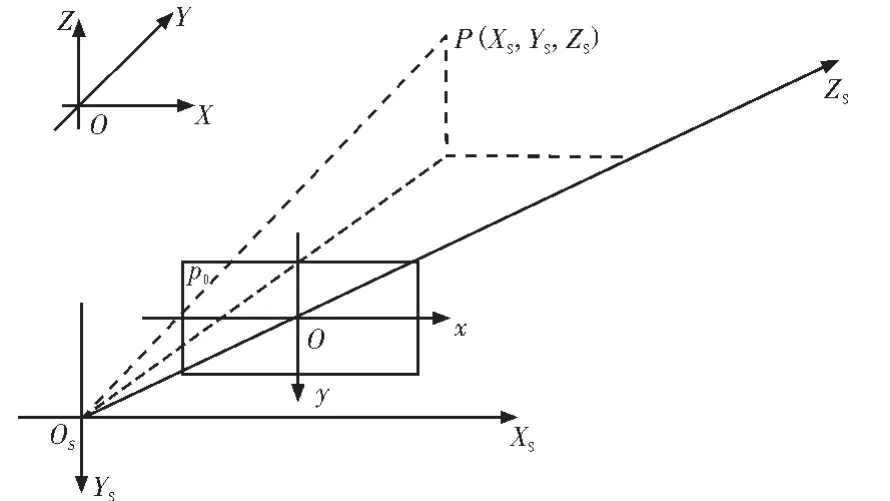
图2 摄像机坐标系和世界坐标系的关系Fig.2 The camera coordinate system and world coordinate system
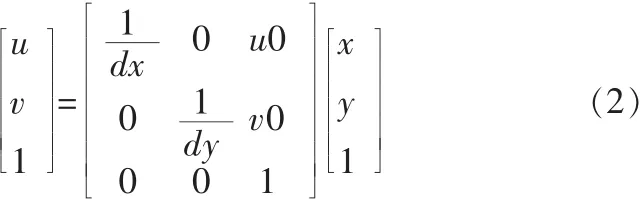
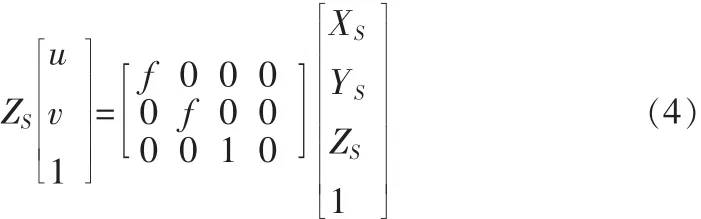
(u,v)表示以像素为单位的像素坐标系的坐标,(x,y)表示以毫米为单位的图像坐标系的坐标,原点O1定义在摄像机光轴与图像平面的交点,该店一般位于图像的中心,如图3,但实际情况总是会偏离中心。若O1在u、v坐标系下的坐标为(u0,v0),每个像素x轴和y轴方向上的物理尺寸为dx、d,则在图像中任意一个像素在两个坐标系下的坐标有如下关系:

图3 图像坐标系与像素坐标系关系Fig.3 Image coordinate and pixel coordinate system

用齐次坐标系和矩阵形式表示上式:
由图2的比例关系可以得到摄像机坐标系和图像坐标系之间的变换如下:

用齐次矩阵表示:
由式(3)进一步变换:
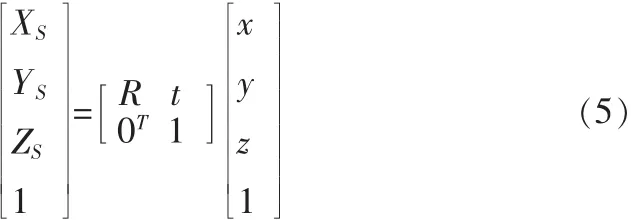
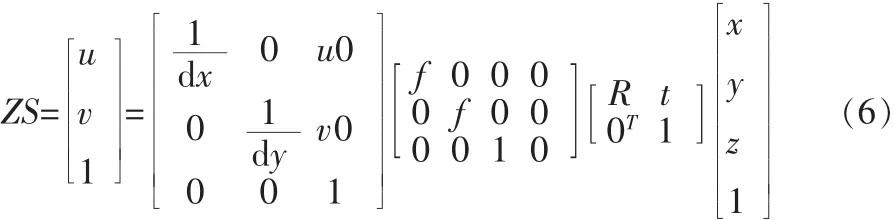
对以上公式进行综合变换计算,得到了以世界坐标系来表示P点坐标与其投影点P的图像坐标系(u,v)的变换关系:
2 伺服平台工作原理
2.1 伺服平台系统组成
图像定位伺服平台由伺服试验平台、旋转伺服电机及减速机构、俯仰伺服电机及减速机构、陀螺仪和硬件电路组成。如图4所示。
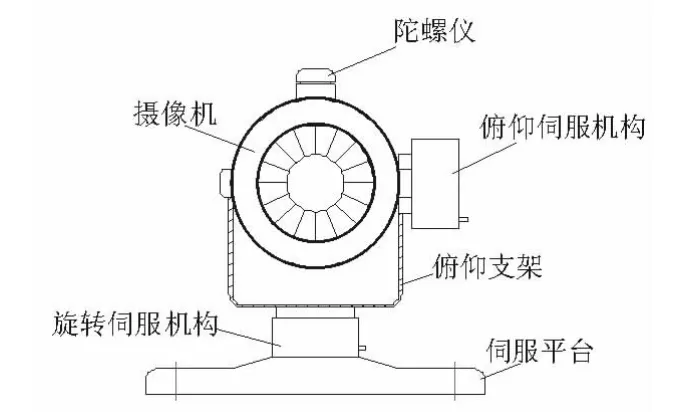
图4 图像定位伺服平台系统组成Fig.4 Servo platform of image positioning system
伺服平台安置有三轴陀螺仪传感器,传感器作为系统的主要部件用来收集伺服平台及其所搭载的实验仪器或设备在空间上的瞬间姿态数据信息并及时反馈给硬件电路。两套伺服机构以90°交叉在伺服平台和俯仰支架上安装,硬件电路为了不妨碍伺服实验平台的运动均放置在平台之外。
2.2 伺服平台的的工作原理
伺服平台是一种全向平台,可以在空间2自由度范围内进行旋转如图5,伺服平台的空间定位数据,主要靠陀螺仪进行获取[3]。当摄像机和伺服系统启动工作,陀螺仪的初始化空间坐标数据会通过计算机传至伺服平台的俯仰伺服电机和旋转伺服电机,然后运行至指定坐标数据处。当上位机通过算法计算出目标坐标数据,将会立即再次与陀螺仪进行数据通讯,陀螺仪获取数据后,会自动传输运动信号至俯仰、旋转伺服电机,使伺服平台到达指定空间坐标处。当到达位置后,陀螺仪将继续检测位置信号并与上位机信号进行比对检测,并且进入等待模式做好接收下一组数据序列的准备。
3 基于DSP的控制系统
3.1 控制系统的硬件组成
伺服平台的位置感应系统选用意法半导体公司(ST)的LIS3LV02DQ三轴陀螺仪作为主要传感器[4]。芯片具有空间X、Y、Z轴数字信号输出加速度模块,集成电路快速接口和可以方便采集位置数据的敏感部件,并提供和外部芯片进行快速通讯的串行/SPI接口。芯片的制造再用精度较高的工艺而非不是通用地CMOS工艺,芯片加速度数据模块有非常全面地可选精度范围——±2 g~±6 g,加速度采样带宽640 Hz[5]。
硬件控制系统和数据计算传输选用TI公司的TMS320C2000系列数字信号处理芯片[6]。由于LIS3LV02DQ是数字信号输出芯片,三轴传感器与芯片之间采用串行SPI接口进行数据传输,因而减少了信号输入和返回的时间,加快了硬件信号处理系统的反应速度。硬件系统获取了加速度数据后立即处理,将算法得出的控制信号传至驱动电路,带动伺服机构工作。如图4所示。
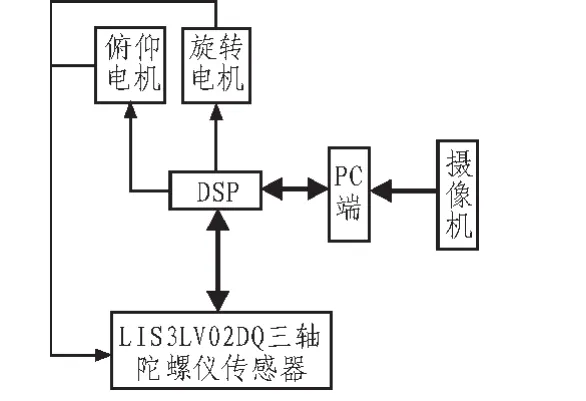
图5 伺服平台硬件控制系统Fig.5 Control system of servo platform hardware
3.2 控制系统程序设计
在图4硬件电路系统框图中可以看到,DSP作为中央处理器,在控制系统中接受PC端和传感器[7-8]端口的数据,并对数据进行处理,最后将控制数据传送至俯仰、旋转电机。TMS320C2000系列芯片具有独立地引导Boot程序代码区,可以通过Boot片上引导程序方便地实现任务所在系统内的编程。而且芯片内具有大容量可编程flash快速擦写区,有足够的空间存放系统任务程序代码。芯片的特殊之处是具有事件管理器(EVA,EVB)功能和相应端口,有多个精度16位可以产生编程模式脉宽调制信号的管脚,为伺服平台使用脉宽信号调节机构的角度、速度提供了更为便利地输出端口。
硬件程序流程如图6所示。
4 结束语
设计的伺服平台结构合理,在前期联合实验测试运行过程中整体显示平稳,在PC端上位机的控制和监测下伺服平台运行可靠,但摄像机定位坐标数据的精度准确性和伺服平台的融合性能还有待进一步的提高。三轴陀螺仪传感器模块的数据传送迅速准确,经过程序优化后的各个伺服机构降低了行走震颤,运行更加平稳流畅。
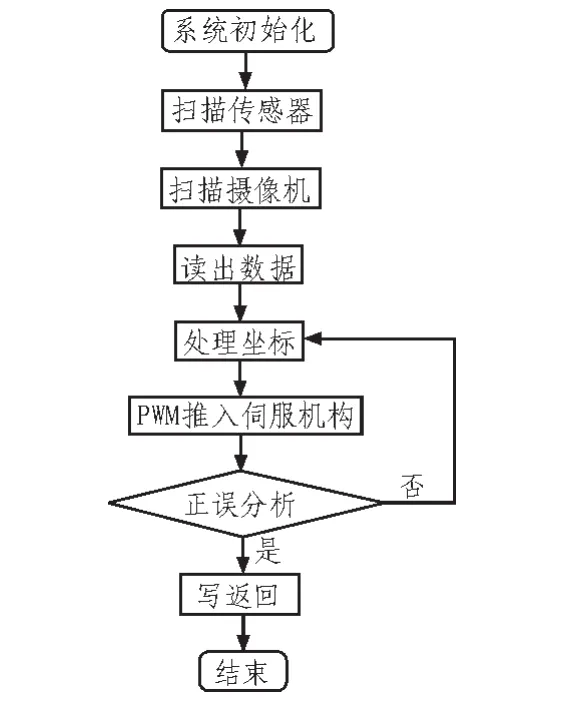
图6 硬件程序流程图Fig.6 Program chart of hardware system
[1]刘传才.图像理解与计算机视觉[M].厦门大学出版社,2002.
[2]马颂德.计算机视觉计算理论与算法基础[M].科学出版社,1998.
[3]杨逢瑜,聂朝瑞.基于三轴陀螺仪的微型液压伺服平台[J].液压与气动,2012:78-81.
YANG Feng-yu,NIE Chao-rui.Miniature hydraulic servo platform based on three axis gyroscope[J].Hydraulic and Pneumatic,2012:78-81.
[4]Voiskovskii M I,Gorshkov A N,Evlanov E N,et al.Threeaxial fiber optic gyroscope[J].Cosmic Research,2009,47(1):68-74.
[5]Juntao Fei,Hongfei Ding.System Dynamics and Adaptive Control for MEMS Gyroscope Sensor[J].International Journal of Advanced Robotic Systems,2010,7(4):23-28.
[6]Strauss,Will.DSP chip options contract and expand[J].IEEE Signal Processing Magazine, United States May,2005:56-59.
[7]王永强,谢迎天,王慧君.基于同轴电容的过电压传感器研究[J].陕西电力,2013(4):61-65.
WANG Yong-qiang,XIE Ying-tian,WANG Hui-jun.Research on overvoltage sensor based on coaxial capacitor[J].Shaanxi Electric Power,2013(4):61-65.
[8]黄华东,郭张军,彭鹏.基于分布式多传感器融合技术的坝基地下水宏观动态监测数据分析[J].陕西电力,2011(3):13-16.
HUANG Hua-dong,GUO Zhang-jun,PENG Peng.Study on macroscopic regime of groundwater under dam section based on distributed multi-sensor data fusion theory[J].Shaanxi Electric Power,2011(3):13-16.