面向景象匹配辅助导航的SIFT图像配准算法
2013-08-20许晓帆
许晓帆,杜 江
(1.中国人民解放军93995部队 陕西 西安 710306;2.西北工业大学 陕西 西安 710129)
现代军用航空器(军机与导弹)对导航系统有着特殊而苛刻的要求:精度要求越来越高(特别是对地攻击),通常在50 m以内,甚至只有几米;抗干扰能力强,要能工作在高强度电子对抗环境中,执行复杂的高机动任务时仍能可靠工作;自主性要求高,要不依赖气象条件,可昼夜工作,且截获率低。景象匹配辅助导航系统 (Scene Matching Aided Navigation,SMAN)采用数字地图来辅助和修正惯导系统,可以有效提高导航精度。而且,由于不需要卫星或其他外在设备,SMAN可满足抗干扰性和自主性的要求。上世纪70年代以来,景象匹配辅助导航技术从理论逐步进入应用阶段,已经成功运用于“战斧”巡航导航、F-16飞机、“潘兴”中程地地导弹和B-2隐形轰炸机。
合成孔径雷达/惯性导航(Synthetic Aperture Radar/Inertial Navigation System,SAR/INS)组合导航系统是SMAN的发展方向[1],其信息融合方式的最终确立,源自两个更为深刻的原因:首先,惯性导航系统是一种自主连续的导航系统,随着时间的积累,导航精度将降低。采用实时测的SAR图像与预先存储的数字地图进行匹配,并用匹配结果修正INS的位置航向信息,可抑制系统误差的增长,提高导航精度。其次,SAR的成像质量与载机的飞行姿态直接相关。任意横向、纵向运动误差都将造成图像的模糊不清和视角变化。通过INS提供的导航信息可对SAR图像进行运动补偿,提高成像质量。
1 景象匹配算法
1.1 景象匹配算法概述
景象匹配技术是将SAR图像与预选存储的数字地图进行实时匹配的过程,为系统提供水平位置和航行信息,是SAR/INS组合导航系统的关键技术。
基于区域的匹配算法是发展最为成熟的一种算法,因其物理意义明确,实现方法简单,在巡航制导下视匹配中已广泛运用[1]。因为其基于像素灰度值构建特征空间,因此又称为基于灰度的匹配算法。然而,模板匹配算法要求在两幅图像的每一点度量相似性,所以运算量随图像尺寸的增长而幂增长,对系统的实时性产生不利影响。虽然后来出现了例如贯序相似性判决算法(Sequencial Similarity Detection Algorithm,SSDA)、变灰级相关算法、变分辨率相关算法等许多改进算法[2-5],以期提高速度。但是,区域的灰度值对于包括旋转、透视在内的空间变换是敏感的(至少在未进一步处理前是这样的),所以此类算法的旋转、透视鲁棒性不佳。
基于特征的匹配算法可以克服这些变换的影响,甚至还包括光照强度变化的影响。所选取的特征通常包括:边缘特征、点特征、和区域特征[6]。Moravec在其算法中使用角点作为点特征,具有代表性。其改进算法(Harris角点检测)对仿射、光照、旋转都有不错的鲁棒性,但是对于尺度变化比较敏感。D.G.Lowe在总结了包括不变矩等多种基于不变量的特征检测方法后提出了尺度不变特征变换 (Scale Invariant Feature Transform,SIFT)算法,实现了特征尺度不变,成为2002年以来最流行的图像配准算法[7-8]。
1.2 SIFT景象匹配算法
1.2.1 检测尺度空间极值
要实现特征的尺度不变,就要在尺度空间中搜索特征。Lindeburg指出,尺度规范化的 LoG(Laplacion of Gaussian)算子σ2Δ2G具有真正的尺度不变性[9]。下式展示了其具体形式:
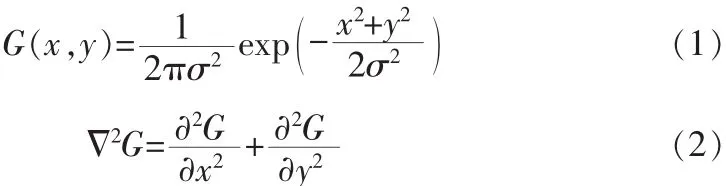
用更有效率的DoG算子可以近似LoG算子,如下式所示。

于是图像和多尺度的高斯函数卷积的结果可构成此图像的尺度空间。通过合理选择k,就构建了一个合理采样频率的离散尺度空间。然后遍历尺度空间,可找到局部极值像素,此像素在本尺度上的8个相邻像素以及上下尺度的各9个像素中取得极值。将找到的这些点作为候选关键点。
1.2.2 定位关键点
为了得到更高的定位精度,用一个二次式来拟合。将D(x)在尺度空间泰勒展开,x 是一个三维向量(x,y,σ)T:

将式中D看作候选关键点在DoG算子下的运算结果,那么就可以得到一个相对于候选关键点的偏移量,记为xˆ,于是便确定了真正的局部极值点:

1.2.3 方向分配
前面的步骤已经记录下了关键点的位置和尺度信息,因此对于平移和尺度变换是鲁棒的。为了使关键点旋转不变,需要找到关键点的方向特征。
在关键点上建立一个窗口,按下式来统计每一点的梯度:

根据关键点的距离来确定每个梯度的权重,本文采用卷积二维高斯核来实现:D(x,y)*G(x,y)。 以将统计结果做成直方图,取最大值方向作为关键点的方向特征。
1.2.4 局部图像描述
描述的目的是在关键点计算后,用一组向量将这个关键点描述出来,用来作为目标匹配的依据。这个描述子不但包括关键点,也包括关键点周围对其有贡献的像素点,也可使关键点具有更强的独特性,提高匹配概率。
如图 1所示,选取关键点周围8×8个像素,箭头方向代表了像素梯度方向,箭头长度代表该像素的幅值。然后在4×4的窗口内计算8个方向的梯度方向直方图。绘制每个梯度方向的累加可形成一个种子点,一个特征点由4个种子点的信息所组成。这样便构成了此关键点的4×4×8=128维向量,作为其描述子。为了提高对光照变化的适应性,将所有描述归一化。
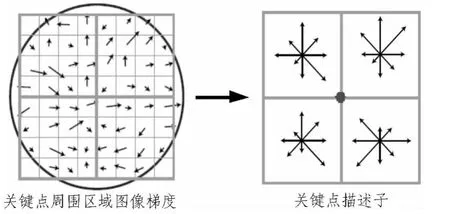
图1 SIFT描述子的生成过程Fig.1 Generation process of SIFT discriptors
1.2.5 其他步骤
检测并描述出机载SAR图像中的关键点后,就可以与机载数字地图中的关键点进行匹配。相似性度量采用直观的向量间欧式距离。设定合理的阈值,便可筛选出匹配的关键点对。累计一定量的关键点对后,便可以估计变换模型,解算出航空器所在的位置和航向参数,供后续的导航解算使用。
为了提高匹配速度,采用如图 2所示的k-d树的结构来进行搜索配对。搜索的内容是以SAR图像的关键点为基准,搜索与其最邻近的数字地图图像关键点和次邻近的关键点。
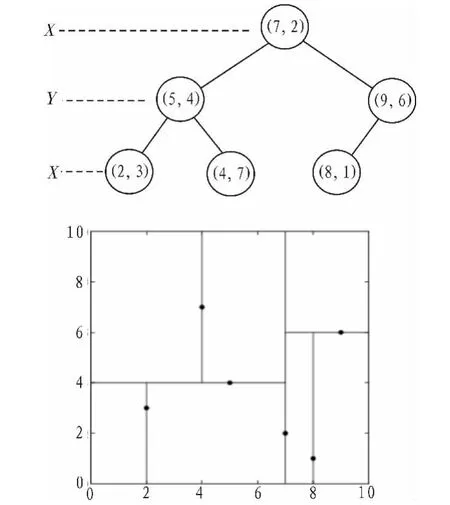
图2 k-d树及k-d树搜索Fig.2 K-d tree and k-d tree query
2 改进的图像配准算法
要将SIFT算法运用于SAR/INS组合导航,必须重视其实时性。生成128维的关键点描述向量需要耗费大量的计算资源。采用主成分分析(Principal Component Analysis,PCA)的方法将向量投影到较低的维度可以降低计算负荷。
根据PCA理论[10],低维特征向量可以还原出高维向量的特征信息,也称之为“主成分”。具体来说,对每个关键点,在它的周围选择大小为41×41像素的区域,计算垂直和水平的梯度,生成 39×39×2=3 042 的矢量,合并成 k×3 042 矩阵 A,k为关键点数;计算矩阵A的协方差covA,选择其前n个特征向量,构成由这些特征向量组成的n×3 042的投影矩阵,n可以是一个根据经验设置的固定值,也可以基于特征值动态选择。投影矩阵只计算一次,并且存储。
建立描述子:在尺度空间关键点的位置和方向,提取一个41×41的窗口,旋转到它的主方向;计算39×39水平和垂直的梯度,形成一个大小为3 042的矢量,与之前计算好的投影矩阵相乘,这样生成一个大小为n的PCA-SIFT描述子。这样,在描述子保留不变性的同时进行降维,大大节省了计算时间。
3 仿真结果
仿真环境:Windows XP SP3操作系统,Matlab 2009b仿真平台,Image Process Toolbox 6.0。如图 3所示,改进的SIFT算法在尺度变化和旋转变换的环境下,实现了正确的图像匹配。
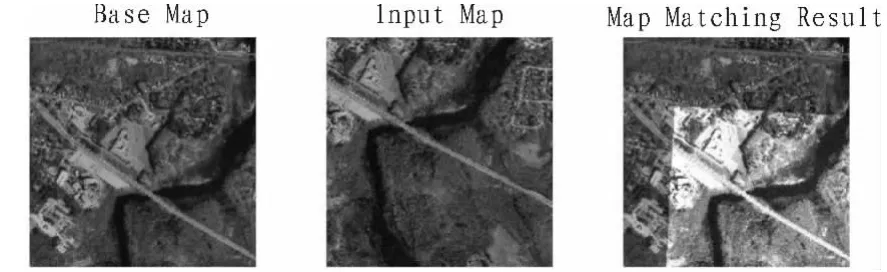
图3 可行性仿真结果Fig.3 Registration results with SIFT
为测试SIFT算法对于SAR图像杂波的鲁棒性,对图像加入下表所示的噪声,并统计匹配概率。

表1 不同噪声的平均匹配率Tab.1 Matching ratio in different nosies
4 结 论
SIFT算法通过局部极值的检测来实现关键点的自动生成,相比之普通的基于特征的景象匹配算法,航空器不必根据任务的不同来人工地确定待匹配点。因此具有更强的普适性;SIFT描述子具有很高的独特性,确保了匹配的高成功率;通过二次曲线拟合,提高匹配精度到亚像素级别;此算法充分考虑了尺度、旋转、照明的变化,具有很高的鲁棒性。
通过理论分析和仿真实验可以得出,基于SIFT的改进景象匹配算法十分适合SAR/INS组合导航的应用,可有效提高系统的可靠性和实时性。
[1]刘建业,曾庆化,赵伟.导航系统理论与应用[M].西安:西北工业大学出版社,2010.
[2]刘晓光,陈曦,陈政伟.基于图像灰度的SSDA匹配算法[J].航空计算技术,2010,40(1):54-57.
LIU Xiao-guang,CHEN Xi,CHEN Zhen-wei.Research on SSDA matching algorithm based on image greyscale[J].Aeronautical Computing Technique,2010,40(1):54-57.
[3]刘国权,李守轩.基于小波图像金字塔的SSDA快速模板匹配算法[J].科技广场,2007,128(11):134-136.
LIU Guo-quan,LI Shou-xuan.A fast images matching algorithm of SSDA based on wavelet pyramid[J].Science Mosaic,2007,128(11):134-136.
[4]Reddy B S,Chatterji B N.An FFT-based technique for translation,rotation, and scale-invariant image registration[J].Image Processing, IEEE Transactions on,1996,5(8):1266-1271.
[5]姜永军,吴小洪,何汉武.图像识别系统在IC封装设备中的应用[J].半导体技术,2005,30(1):46-49.
JIANG Yong-jun,WU Xiao-hong,HE Hang-wu.The use of pattern recognition system in IC package equipment[J].Semiconductor Technology,2005,30(1):46-49.
[6]谭志园,孙继银,王忠.景象匹配算法研究进展与展望[J].计算机技术与发展,2012,22(9):66-70.
TAN Zhi-yuan,SUN Ji-yin,WANG Zhong.Status and prospect ofalgorithm forscene matching systems[J].Computer Technology and Development,2012,22(9):66-70.
[7]Lowe D G.Distinctive image features from scale-invariant keypoints[J].InternationalJournalofComputerVision,2004,60(2):91-110.
[8]Lowe D G.Object recognition from local scale-invariant features[C]//Computer Vision.The Proceedings of the Seventh IEEE International Conference on,1999:1150-1157.
[9]TonyLindeberg.Scale-spacetheory:a basictoolfor analyzing structures at different scales[J].Journal of Applied Statistics,1994,21(1-2):225-270.
[10]KeYan,R.Sukthankar.PCA-SIFT:a more distinctive representation forlocalimage descriptors[C]//Computer Vision And Pattern Recognition.Proceedings of the 2004 IEEE Computer Society Conference on,2004:506-513.