相位差变化率的高精度提取算法研究
2013-08-10王大宇张冠杰
王大宇,张冠杰,李 旭
(中国电子科技集团公司54所,石家庄050081)
0 引 言
相对于多站无源定位而言,单站无源定位避免了复杂的时间同步以及多个观测站之间的数据融合,因此具有更好的独立性和机动性,而且结构简单,易于工程实现[1]。并且单站无源定位系统接收到的信号是直接来自目标辐射的直达波,信噪比较高,因此可以获得比雷达远得多的探测距离。
单站无源定位的实现通常是利用单个运动的观测平台对辐射源进行连续测量,在获得一定的观测信息积累的基础上,进行适当的数据处理以获取辐射源目标的定位数据[2]。目前,单站无源定位技术的具体实现方法主要有:测向定位法、方位/多普勒频率定位法、测相位差变化率定位法。
从现有的实验仿真结果来看,相位差变化率定位法的定位速度和定位精度比传统的单站无源定位跟踪方法高很多[3]。但是相位差变化率定位法的快速性、准确性是以增加测量的复杂度和难度为代价的[2],并且该方法要求相位差变化率参数能够快速准确地获取。
为了求得准确解模糊的相位差变化率数据,本文介绍一种解缠绕解模糊的方法,即利用解缠绕技术直接对不同时刻模糊的相位差数据求解,进而得到无模糊的相位差变化率数据,并且利用差分/α-β滤波法快速获取高精度的相位差变化率数据。
1 相位差解模糊
利用解缠绕技术求取无模糊的相位差变化率数据是一种新技术[4]。在单站高精度定位中采用的干涉仪天线,为了获得较大的基线波长比增益,基线距离d一般远大于,因此实际所得到的相位差是严重模糊的。由于在定位过程中直接利用的是相位差变化率数据,而不是相位差数据,因此可以对所接收到的原始相位差数据求导(差分)得到相位差变化率。
鉴于原始相位存在模糊,会产生若干跳变,因此需要对相位差进行解模糊处理。当干涉仪基线较长时,无法根据单个基线干涉仪的相位进行解模糊。当脉冲重复频率(PRF)大于某一门限时,就可以利用解缠绕技术将多个不同时刻模糊的相位差数据求解到无模糊的相位差变化率。
如图1所示,实际测量的相位差Φ存在模糊现象,始终是处在[0,2π)范围内。但是到某一时刻,有可能恰好此时相位存在2π跳变,如果直接求这2个相位的差,则会得到错误的结果。因此应该判断相邻相位之间的变化有没有超过π,如果有,则应选择相位补偿±2π,然后就可以求得正确解模糊的相位差变化率数据。
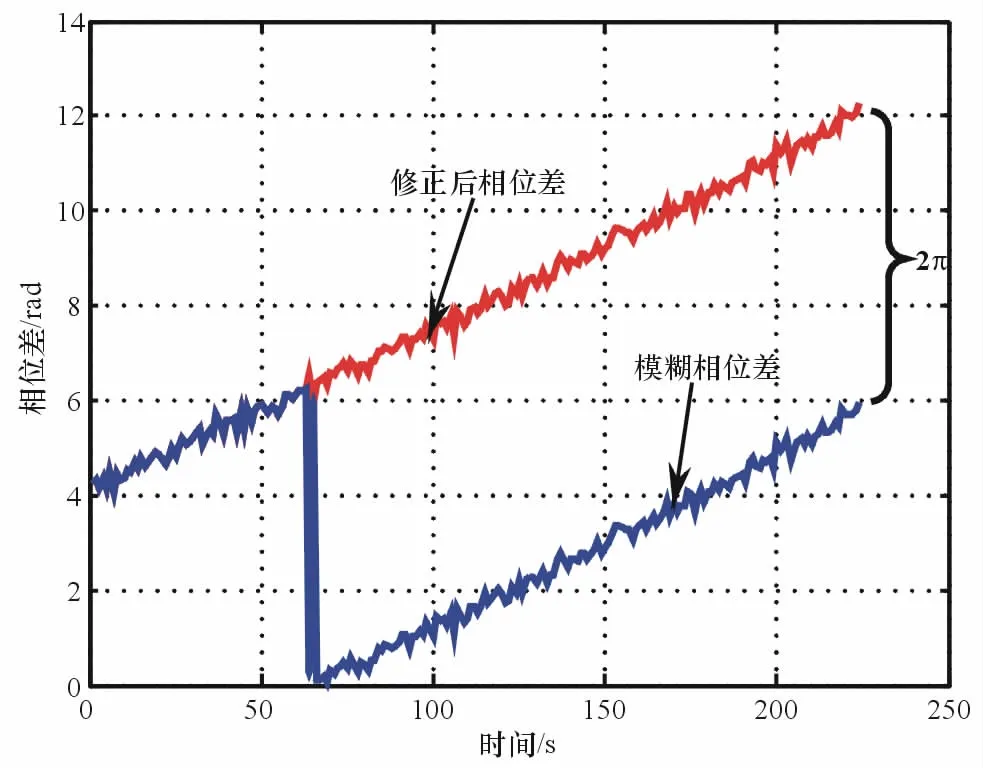
图1 相位解缠绕示意图
2 相位差变化率数据的提取
相位差变化率数据的测量精度越高,定位的速度就越快,定位精度就越高[2]。因此,为了得到高精度的相位差变化率数据,提出了利用滤波的方法来获取相位差变化率数据。这里介绍一种相位差变化率的提取方法——差分/α-β滤波法,并与传统的差分提取法进行仿真比较。
2.1 差分法提取相位差变化率数据
差分方法提取相位差变化率数据的原理是利用(i-1)T时刻到iT时刻这一段时间内相位差数据的平均变化速度来近似iT时刻的相位差变化率,即这种方法是最简单的提取方法。假设相位干涉仪测得的相位差是相互独立的,已解模糊相位差数据的测量误差服从正态分布,误差均方差为σφ,则利用差分方法提取相位差变化率数据的误差均方差为:

在T=5s的情况下,由该式计算可得:当σφ=3°≈0.052 4rad时,相位差变化率数据的误差均方差为σ˙φ=0.014 8rad/s。
以单一频率信号为例,对差分方法进行仿真分析,参数设置为:干涉仪沿机轴方向基线长度d=5m,信号载频fT=6GHz,采样间隔Ts=0.05s,已解模糊相位差数据的测量精度为σφ=3°≈0.052 4rad,固定目标位置为 (72.8,200)km,机载观测平台的运动起点在坐标原点,速度为 (300,0)m/s。100次蒙特卡罗实验仿真结果如图2所示。从以上仿真结果可以看出,采用差分方法提取相位差变化率数据,当可供利用的已解模糊相位差数据精度为σφ≈0.052 4rad时,相位差变化率数据的差分误差均方差集中在0.014 8rad/s附近,这与前面的理论分析结果是一致的。
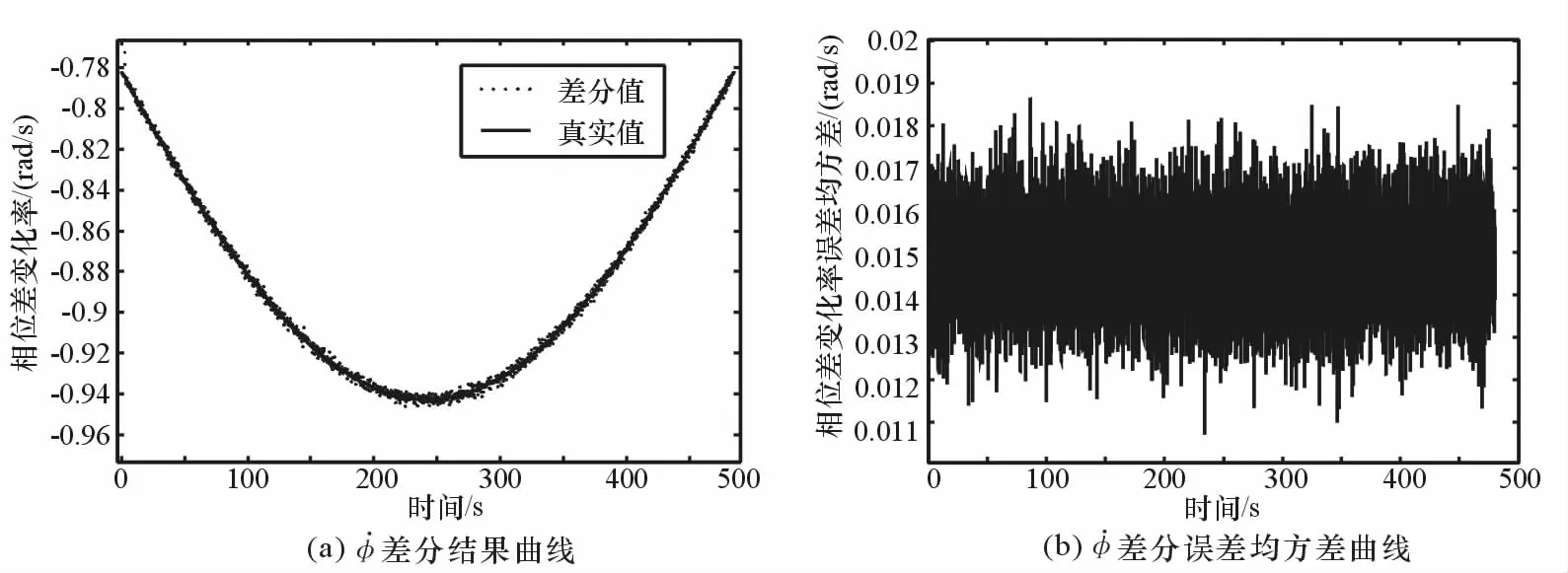
图2 差分方法获取相位差变化率˙φ的仿真结果
2.2 利用差分/α-β滤波法提取相位差变化率数据
在α-β滤波器中,最重要的是相位差变化率滤波环路参数α和β的选取问题。本文采用最佳选择法选取α和β的数值。为了保证在不同β值下,归一化稳态相位差预测均方差变化不大,取α=0.123,按照最佳选择法下α和β的参数关系:β=按照选定的α和β的数值,对差分法得到的相位差变化率数据进行α-β滤波仿真,100次蒙特卡洛试验结果如图3所示。

图3 差分/α-β滤波算法处理后的相位差变化率的仿真结果
通过分析以上仿真结果可知,按照最佳选择法选定的α、β参数值设计的滤波器对差分法得到的相位差变化率数据˙φ进行滤波处理,当可供利用的已解模糊相位差数据精度为σφ≈0.052 4rad时,差分法得到的相位差变化率数据的误差均方差集中在0.014 8rad/s附近,再经过α-β滤波处理,于7s后α-β算法达到稳定态,稳定后的相位差变化率数据的误差均方差集中在0.004 5rad/s附近。
2.3 相位差变化率提取方法分析
通过对上述2种相位差变化率提取方法的仿真比较可以发现,对于给定精度的输入数据,不同的提取方法会得到不同精度的相位差变化率数据。通过仿真比较可得:差分/α-β滤波处理方法得到的相位差变化率数据的精度明显高于差分处理方法得到的相位差变化率的精度。事实上,差分处理方法提取相位差变化率数据时没有任何限制条件,但是其无法对相位差变化率数据进行平滑。差分/α-β滤波处理方法在提取相位差变化率数据时对相位差数据的变化特征没有要求,并且得到的相位差变化率数据精度较高。
3 结束语
本文首先提出了一种解缠绕的方法来解决相位差模糊问题,并在此基础上提出了差分/α-β滤波提取方法,将其与传统的差分法进行仿真比较。仿真结果表明,差分/α-β滤波提取方法明显提高了相位差变化率数据的精度,进而为相位差变化率定位精度的提高奠定了坚实的基础,为以后的工程应用提供了理论基础。
[1]姚坤.单站无源定位跟踪方法研究[D].成都:电子科技大学,2003.
[2]单月晖.空中观测平台对海面慢速运动目标单站无源定位跟踪及其关键技术研究[D].长沙:国防科学技术大学,2002.
[3]胡来招.无源定位[M].北京:国防工业出版社,2004.
[4]郭福成,贾兴江,皇甫堪.仅用相位差变化率的机载单站无源定位方法及其误差分析[J].航空学报,2009,30(6):1090-1095.