信息融合技术在军事领域的应用与研究*
2013-08-10龚纯
龚 纯
(中国舰船研究设计中心 武汉 430064)
1 引言
随着电子技术、信息处理技术的飞速发展,数据融合技术已广泛应用于各种复杂领域。该技术是关于把多个传感器在空间或时间上的冗余或互补信息,依据某种准则进行组合,以获得对被测对象的一致性解释或描述,它有助于对目标截获、识别机跟踪性能的改善。它将不同来源、不同模式、不同时间、不同地点、不同表现形式的信息进行融合,最后得出被感知对象的精准描述[1~3]。
2 数据融合技术
2.1 数据融合技术基本定义
数据融合(Data Fusion,DF)的字面意义即对来自多个传感器或信息源的数据进行综合和提炼。但同其他许多名词一样,至今缺乏一个为领域研究者普遍接收的定义,常见有以下三种[4]:
1)美国国防部的定义:数据融合是一个多级多侧面的加工过程,包括对多个数据源数据和信息的自动化的检测、互联、相关、估计和组合处理。
2)Wald定义:数据融合是一个形式化的框架,由于联合多个数据源数据的明确的方法和工具组成;融合的目的是为了获得较高质量的信息,这里“较高质量”的确切的含义则取决于应用。
3)Buede和Waltz的定义:数据融合是一个自适应的知识创建过程,通过对来自各种信息源的一致或不一致观测数据的校正、相关和合并处理,建立起有组织信息索引集,并由此对某个特定的观测区域的结构、行为进行建模、理解和解释。
2.2 数据融合模型
在数据融合的理论和模型研究中,最有代表性的当属美国国防部于1986年创建的数据融合过程模型,该模型是一个通用的面向功能的概念化模型,采用分层结构,其顶层由八个部分组成,包括:信息源、人机交互、信息源预处理、第一级处理(对象精练)、第二级处理(态势精练)、第三级处理(威胁精练)、第四级处理(过程精练)和数据管理。如图1所示。
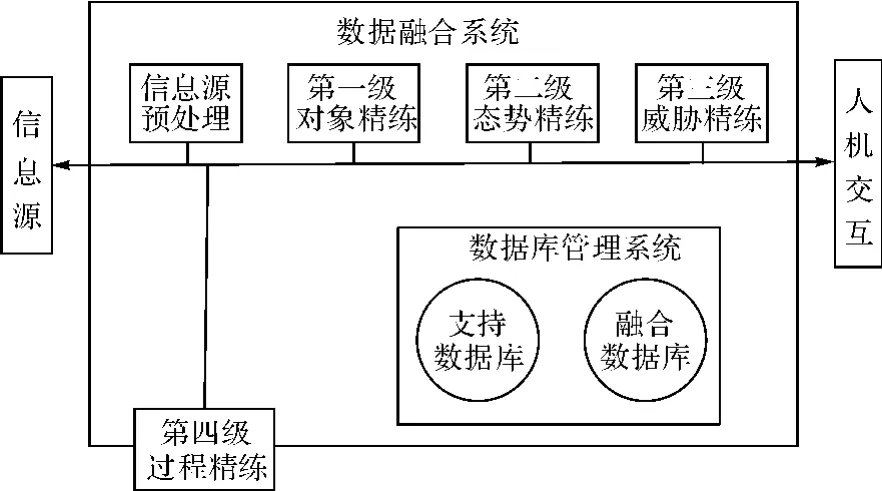
图1 数据融合的过程模型
3 数据融合的层次分析
由于数据的多样化,在多传感器数据融合中目标识别级融合有三种基本结构[5]:即数据层融合、特征层融合和决策层融合结构。
三种层次各有其特点,可针对不同的情况采取不同的方法进行。数据层融合是最低层的融合,是在对传感器原始信息(数据)未经过或经过很小处理的基础上进行的,它需要各个融合的传感器信息源具有精确到一个像素的配准精度的任何抽象层次的融合[6]。优点是能够提供其他两种层次融合所不具有细节信息,但也具有处理代价大、通信量大、抗干扰能力差、对传感器要求高的局限性。
决策层融合的优缺点正好与数据层融合相反,其传感器可以是异质传感器,预处理代价高,融合处理代价小、通信量小、抗干扰能力强的特点。
特征层融合则是上述两种层次信息融合的折中形式,兼有两者的优缺点。各层次融合的优缺点详见表1。
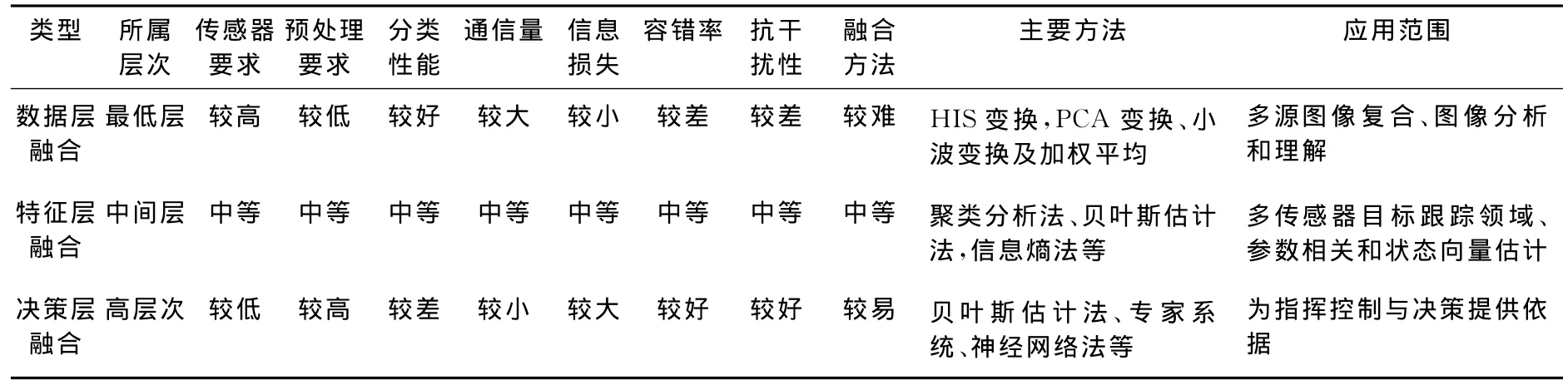
表1 三种层次融合对比分析表
4 应用领域
4.1 水声目标探测识别的应用
数据融合技术在水下水声目标探测识别方面是较早应用的领域。由于水下环境的复杂性和不确定性,造成了单个传感器接收信息不仅不全面而且不可靠,从而使得多个传感器的联合使用成为一个趋势。现代舰艇往往配备多部主动声纳和被动声纳,搜集不同方位的目标信息或者同一目标的不同特征信息,将多组信息融合处理,则能够得到更全面的信息,进而做出更精确的判断。
水下目标探测中数据融合技术应用主要是在已有的检测技术[7]中运用分布式融合机制,即各传感器基于自身的观测值,对目标存在与否进行判决,然后将判决结果送至融合中心。在融合中心,按照Neyman-Pearson准则,将N个均不判据结果进行融合。在这种分布式检测融合机制,由于不需要将每个传感器数据传输至融合中心,而只传送判决结果,所以可以在很大程度上降低系统的通信压力,减小了融合中心的计算负荷,提高了系统的运作效率。但是,由于假设每个传感器的测量值是独立的,即每个传感器只基于自身的测量值得到判决,而不考虑与其他传感器的相关性,系统未能有效地利用各传感器的信息。这样,可能会增大系统误差。
水下目标识别[8]方面的应用则主要是将多个方位的分类结果进行融合,该分类可以是决策层的[9],也可以是特征层的[10],前者原理就是将多个方位的分类结果进行融合,后者是对每个方位抽取的特征信息进行融合,而不是对它们的分类结果进行融合,如图2所示。
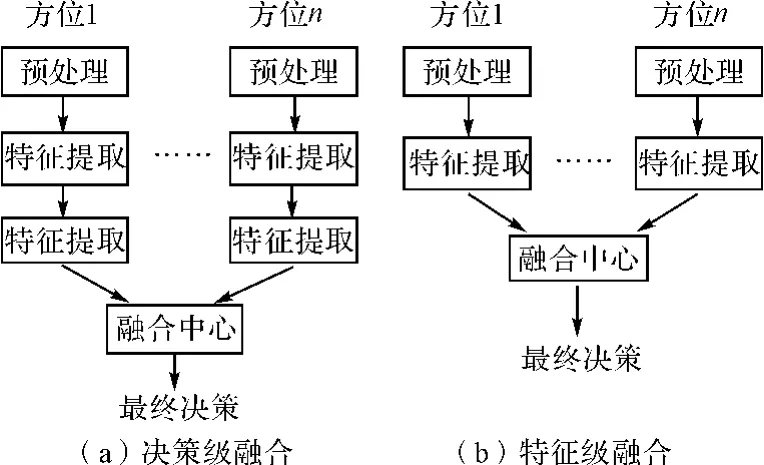
图2 用于水下目标分类的数据融合框图
通过数据融合处理后的信息具有更好的目标跟踪性能,使得在水下复杂环境下对目标探测和识别能力大大增强。
4.2 计程仪中的应用
复合式计程仪作为一种速度测量的基本导航设备,对测速数据的实时性和稳定性要求非常高,多传感器数据融合技术是解决这一问题的有效手段。复合式计程仪多传感器数据融合处理主要是为了解决信息稳定性和机动状态下的实时性之间的矛盾,同时在测速精度一致的情况下,提高速度信息的置信度[11]。以某型复合式计程仪为例:该计程仪配备了三个电磁测速传感器,其原理是采用了加权平均算法作为基本的数据融合算法,权值通过统计某路测速传感器的速度数据序列的数学期望和方差得到。数据融合技术在该领域的应用原理如图3所示。
由图3可见,输入数据是三路电磁传感器的速度信号和状态信号。根据通道特性,在时间上顺序统计各通道一定时间内的数学期望和方差,利用其统计量与综合处理后速度和相应航行状态进行比较,从而判断该路信号是否可信。对速度估计信号,当信息不可信的情况下自动分配其当前权值为0,在信息可信时,自适应的给出相应的权分配值和该路信息当前的速度估计值,权值大小与方差成反比。估计每路信号的估计值和所分配的权值后,算法根据一致传感器的贝叶斯估计方法对综合测量信息进行空间滤波,最后输出数据融合结果和各传感器状态信息。
数据融合技术在复合式计程仪中的应用一方面使得融合后方差比单值测量的方差要小,从而提高了设备任务可靠性和信息稳定度;另一方面,信息融合算法增加了变速判断功能,当速度变化时赋予最新测量值以更大的权值,使得估计值更快的跟踪变化的速度,因此提高了速度信息的实时性,改善了信息质量。
4.3 预警机系统中的应用
预警机是现代防空作战指挥和情报保障的重要组成部分,预警机系统内各传感器信息的综合利用离不开包括预警雷达与敌我识别器、主雷达与ESM接收机系统等在内的传感器,并进行数据融合,从而获得完整而及时的战场态势和威胁估计[14]。
以预警机中对目标获取信息的两种最重要传感器-主雷达与ESM为例进行数据融合技术应用分析:前者是一种主动雷达,通过发射脉冲和接收目标回波来获取有关目标的位置及其运动参数,后者通过截获目标发射的电磁信号,提取辐射源信号特征,再进一步由辐射源特征识别出目标类型。ESM在截获辐射源信息同时还能测定辐射源的方向信息,即获得目标所在的角度,ESM通常有比雷达更大的作用距离,因而可以在更大范围内发现目标,从而为主雷达指示目标。因此,根据主雷达与ESM各自的特点,在进行数据融合前首先要将两者对目标的位置数据校准到同一时刻,然后采用一定的准则判断两者信息源来自同一目标。对各目标的位置数据与辐射源角度进行跟踪和滤波,比较同一时间点上各目标与各辐射源滤波后的角位置值,计算两种角位置数据任一对之间的相关数据值,当这一相关度值超过预定的阈值时,认为可能是相关的,再超过预知的角位置对中,选择最大的一对,认为他们是相关的目标与辐射源。预警机系统数据融合处理原理框图见图4。
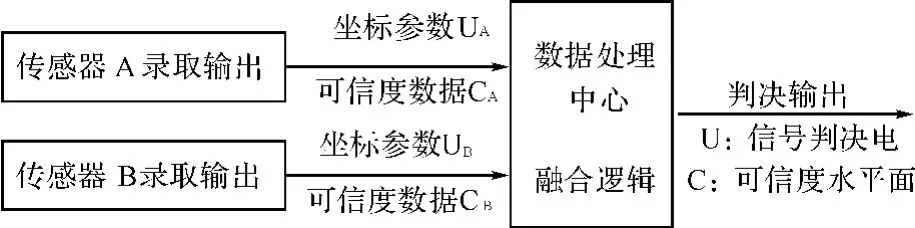
图4 预警机系统数据融合处理原理框图
由此可见,预警机系统中充分利用不同目标各个方向、不同频段的反射特性,采用数据融合技术对信息进行处理后最大限度地提取信息,满足战场对信息、目标识别和态势分析的需要,从而全面提高系统对目标探测和识别性能。
5 结语
近几年来,数据融合技术普遍应用于军事、工业、交通、医学等不同领域。伴随着该技术基础理论研究地不断深入和科研人员地不懈努力,相信在不久的将来,数据融合技术相关算法的完善、软硬件支持环境的构建以及测试平台的开发,必将给该技术的发展带来更广阔的应用前景。
[1]何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2010:1-12.
[2]Waltz E,L ilnas J.Multisensor data fusion[M].Boston:A retch House,2000:9-17.
[3]Sasiadek J Z.Sensor fusion[J].Annual Reviews in Control,2002,26(26):203-228.
[4]卫爱萍,王士杰,等.现代舰艇火控系统[M].北京:国防工业出版社,2008(1).
[5]熊凌,张凯.数据融合及其应用[J].湖北工业大学学报,2005,20(3):145-147.
[6]黄惠宁,刘源璋,梁昭阳.多传感器数据融合技术概述[J].科技信息,2010(15):72-73.
[7]白银生,赵俊渭,相明.基于N-P准则的水声信号检测系统信息融合[J].信息与控制,2003,32(6):517-520.
[8]Fairweather J R,Greig A,et al.Object recognition by machine vision to enhance scene interpretation in an underwater application[C]//OCEANS’95.MTS/IEEE.Challenges of Our Changing Global Environment’.Conference Proceedings,1995:1865-1870.
[9]Yao M de,Sadjadi R A,Jamshidi A A,et al.A study of effects of sonar bandwidth for underwater target classification[J].IEEE Journal of Oceanic Engineering,2002,27(3):619-627.
[10]Jaime Salazar,Marc Robinson,Mahmood R,et al.A hybrid HMM-neural network with gradient descent parameter training[C]//Neural Network:Proceedings of the International Joint Conference,2003:1086-1091.
[11]潘琪祥.谈谈船速和计程仪改正率测定方法的改进[J].天津航海,2001(4):34-36.
[12]邹伟,刘兵,孙倩.多源信息融合能力评估关键技术综述[J].计算机与数字工程,2010(3).
[13]冯贵玉,赵琪,张可黛,等.多源信息融合认知机理与模型研究[J].计算机与数字工程,2013(2).
[14]赵跃,马鑫.数据融合技术在预警机系统中的应用[J].国防科技,2007,2(2):26-28.