城市地铁水平位移测量方法及精度分析
2013-08-06谢向进
谢向进
(新疆交通规划勘察设计研究院,新疆乌鲁木齐 830006)
1 引言
城市地铁通过开发地下空间,很好地解决城市空间的扩大与土地资源有限性之间的矛盾以及城市人口迅速增长与有限的交通设施之间的矛盾,极大地缓解了城市交通压力,被誉为“城市的生命线”。伴随着地铁的发展,地铁沿线区域迅速成为房地产、商业等开发的焦点,不可避免地会在地铁沿线开挖基坑。紧邻地铁的大型基坑开挖,会引起地基地下水位和应力场发生变化,导致隧道结构在水平方向发生位移,一定的位移可认为是正常现象,但如果位移过大将致使运营中的地铁隧道面临一定的安全威胁。因此在基坑施工期间,必须对邻近的地铁车站及区间隧道进行水平位移监测,以掌握基坑施工对邻近地铁隧道结构水平位移的影响,为基坑建设方及地铁相关方提供及时可靠的信息,从而实现信息化施工,对确保地铁安全运营具有重要意义。但是,由于地铁隧道狭长空间的限制,且常常并非直线型,利用常规控制测量方法[1]在控制点上架设仪器测量各监测点极其不便,而且网形结构较差,给测量工作带来很多困扰。通过在隧道两端建立稳定的基准点,利用基于边角联合后方交会的自由设站法,方便、灵活,在解决类似狭长、呈带状的特殊工程中的测量问题上具有较好的应用前景。
2 自由设站法测量原理
基于边角后方交会的自由设站法[2]就是自由选择设站点,通过测量设站点与已知控制点间的方向和距离,经严密平差确定设站点的坐标。其原理如图1所示,A、B为已知点,P为待定点,在P点架设全站仪,分别测定距离SPA、SPB及夹角γ。因存在多余观测,可进行间接平差[3],角度和边长的误差方程式为:


图1 自由设站交会原理
式中,各项具体表达形式为:


单位权中误差估值为

式中,f为自由度。P点坐标改正数的协因数阵。

P点点位中误差为:

3 应用实例分析
3.1 工程概况与测点布设
某市某两个地铁车站区间隧道西侧开挖一个面积约 32634 m2、深约 18 m的大型基坑,基坑周长约780 m,靠近地铁侧的基坑边线长约 240 m,距地铁上行线隧道距离约 5 m。实际监测范围为基坑边线对应的地铁线路区域及沿线路方向前后各外放 60 m,共约 360 m。在隧道的水平位移监测中,基准点只能布设在隧道两端相对稳定的区域,需远离变形区80 m~120 m[1]。由于地铁隧道狭长且并非直线型,如果直接在基准点上设站监测测点坐标,很难覆盖线路上的全部测点,且两端的基准点间无法通视,基准网的测量很难进行,无法检验基准点的稳定性,使得水平位移的测量受到重重阻碍。采用上述自由设站法则可以很好地解决这一问题,既省时省力,又能保证测量精度。本文以靠近基坑侧的上行线隧道水平位移监测为例进行分析,监测示意图如图2所示。JS1、JS2和JS3、JS4分别为位于隧道南、北两端的基准点,离变形区较远,认为是稳定的。在中间变形区域内设置两个工作基点GJ1、GJ2作为自由设站点,用于架设全站仪,所有基准点及工作基点均设有强制对中装置。水平位移监测点(S1~S28)按一定密度布设在隧道中间,其中对应基坑边线的部分(S4~S25)每隔 10 m布设一个点,基坑边线外(S1~S4及S25~S28)每隔 20 m布设一个点。水平位移测量采用具有自动目标搜索、自动照准、自动观测功能的Leica TM30测量机器人(测角精度±0.5"、测距精度 0.6 mm+1 ppm)配合Leica圆棱镜。
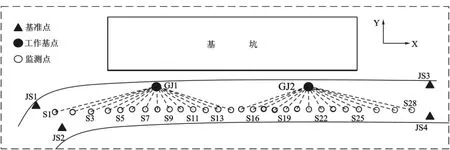
图2 水平位移监测示意图
3.2 控制网测量及自由设站点精度分析
由图2中4个基准点(JS1~JS4)和2个工作基点(即自由设站点GJ1、GJ2)构成了水平位移监测控制网,控制网作为水平位移监测的参考基准,其稳定性十分重要,每隔一定时间需复测一次。采用独立的隧道坐标系,沿隧道方向定义为X轴,垂直隧道方向为Y轴,这样监测点Y坐标的变动即大致反映了隧道的水平位移情况。测量时先将全站仪架设在工作基点GJ1上,按照全圆测回法分别照准JS1、JS2及GJ2,测量其方位角和边长,然后将全站仪搬至工作基点GJ2上,按全圆测回法分别照准JS3、JS4及GJ1,测量其方位角和边长。测量结束后按照式(1)~式(5)对此边角网进行平差计算,平差时以距离变形区最远的JS4坐标和JS4到JS3的方位角为起算数据,解算出各基准点及自由设站点的坐标并评定其精度。尽管增加测回数可在一定程度上提高测量精度,但由于测量时间等因素的限制,测回数不可能很多。在实际工作中应根据具体情况选择合适的测回数。表1列出了测量1个~9个测回时两个自由设站点的坐标及精度。

自由设站点坐标及其点位精度 表1
表中,mx、my分别为设站点X、Y方向的中误差,mp为其点位中误差,E、F为点位误差椭圆参数(位差的极大值与极小值)。根据《城市轨道交通工程测量规范》(GB50308-2008)变形监测要求,水平位移监测点点位中误差限差为 ±3.0 mm。因此,水平位移监测点X、Y方向上的中误差限差为从表中可以看出,当测回数为6时,工作基点的mx、my、mp及E、F均可控制在 ±1.0 mm以内,取两倍中误差作为极限误差,则工作基点的点位中误差在±2.0 mm以内,而距离工作基点最远的水平位移监测点(即最弱点)约为 100 m,根据误差传播定律,最弱点的点位中误差约在 ±2.7 mm(<3.0 mm)以内,因此能够满足地铁隧道水平位移监测的精度要求。
3.3 水平位移监测点精度分析
理论上讲,控制网平差解算出工作基点GJ1、GJ2坐标后,便可根据极坐标法[5]测量各监测点坐标(如图2中所示)。但是由于工作基点位于隧道变形区域,有可能发生变动,为了保证监测成果的准确性和可靠性,在进行水平位移测量时,将仪器架设在工作基点上,先测量设站点到隧道邻近一端的两个基准点的距离和方位角,根据基于边角后方交会的自由设站原理得到设站点坐标,然后以此坐标为基准用极坐标法进行水平位移监测点的测量。根据极坐标测量原理及误差传播定律得:


式中,mx、my分别为水平位移监测点j在X、Y方向的中误差,mj为其点位中误差;mxGJ、myGJ分别为设站点(GJ1或GJ2)在X、Y方向的中误差;β为自由设站点到监测点j的方向与已知方向的夹角,D为自由设站点到监测点j的水平距离;mD为仪器测距误差,mβ为仪器测角误差。由隧道一端的两个基准点后方交会得到的设站点坐标在X、Y方向上的精度一般均在 0.6 mm左右,据式(6)~式(8)算得水平位移监测点精度如表2所示。
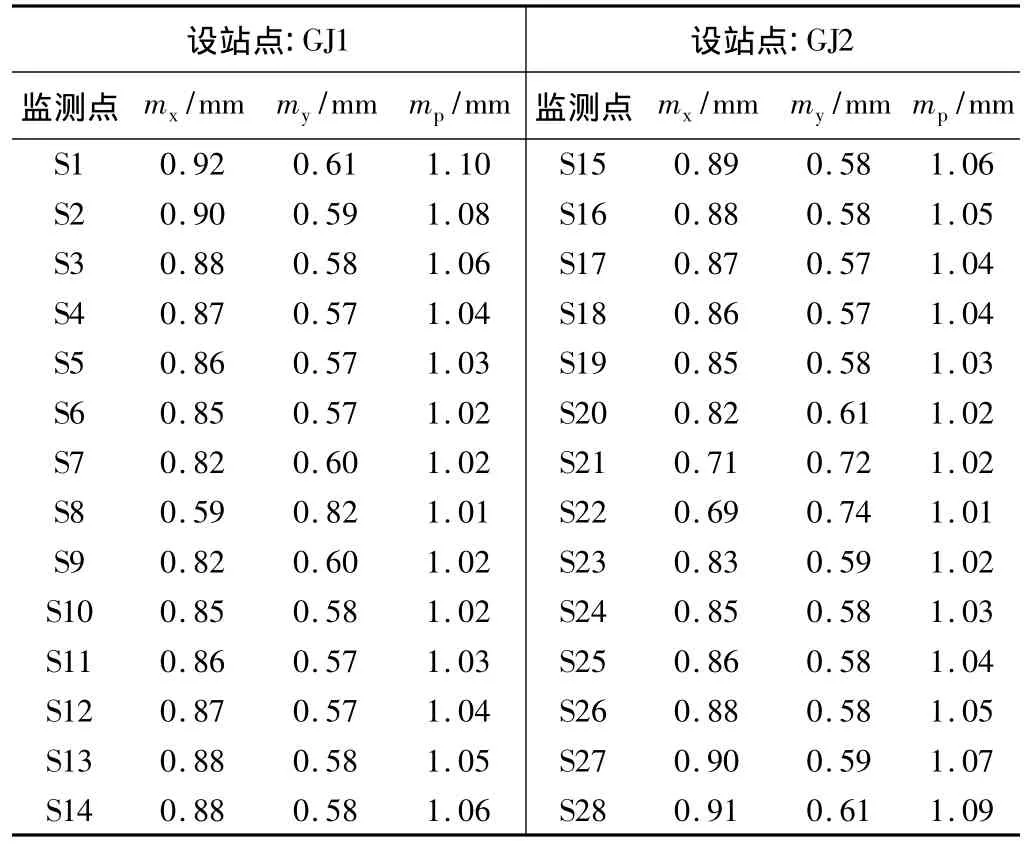
水平位移监测点精度 表2
表中,mx、my分别为水平位移监测点在X、Y方向上的中误差,mp为监测点点位中误差。由表2知,监测点点位中误差均在 1.0 mm~1.1 mm之间。由于监测点Y坐标的变化可大致反映隧道的水平位移状况,监测点 Y方向上的测量中误差约在 0.57 mm~0.82 mm之间,平均为 0.6 mm,若取两倍中误差作为极限误差,则监测点Y方向测量的最大中误差为1.64 mm<2.1 mm,可满足地铁隧道水平位移变形监测的要求。
4 结论与讨论
(1)在狭长的地铁隧道内,利用自由设站法可以很好地解决隧道两端控制点不通视、隧道内仪器转站不便等问题,方便灵活,避免了诸多复杂工作环境的影响,极大地提高了工作效率。
(2)本文以某地铁隧道监测为例,介绍了自由设站法的应用,并对监测精度进行了深入分析,得出该方法可以满足地铁保护区隧道水平位移变形监测要求的结论。
(3)该方法也适用于其他类似狭长呈带状的工程,如高铁无砟轨道、大型桥梁等的变形监测,具有较好的应用前景。
(4)根据基于边角联合后方交会的自由设站法原理,设站点的坐标由已知基准点交会得到,因此,如果位于隧道两端的基准点发生了显著性变动,却仍以其原坐标为基准进行平差解算,那么设站点坐标势必会受到影响,从而监测点坐标也会受到影响。因此,如何判定网中基准点是否稳定,即监测基准网的稳定性分析问题,也是地铁隧道水平位移监测中不可忽视的、值得深入研究的问题。
[1]刘绍堂.控制测量[M].郑州:黄河水利出版社,2007.
[2]华锡生,黄腾.精密工程测量技术及应用[M].南京:河海大学出版社,2002.
[3]武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003.
[4]邱章云.全站仪自由设站极坐标法在隧洞工程测量中的应用[J].城市勘测,2010,6(3):101~105.
[5]袁峥,杨锦波,刘俊伟.宁波市常洪隧道沉管接缝平面位移监测技术探讨[J].城市勘测,2012,10(5):142~143,154.
[6]刘明学.边角联合后方交会在测量工作中的应用[J].甘肃科技,2009,25(7):79 ~81.
[7]王庆,于先文.顾及已知点精度的自由设站算法及精度分析[J].东南大学学报·自然科学版,2009,39(2):372~376.
