无刷直流电机反电动势估计方法
2013-07-06刘栋良崔言飞陈镁斌
刘栋良 崔言飞 陈镁斌
(1.杭州电子科技大学自动化学院 杭州 310018 2.卧龙电气集团有限公司 上虞 312300)
1 引言
无刷直流电机具有结构简单、控制方便、可靠性高、功率密度大、效率高等优点,在工业领域得到广泛应用。近年来,无刷直流电机的无位置传感器控制一直是国内外的研究热点,较为常见的转子位置信号检测方法有[1-7]:①反电动势法,它是目前技术相对成熟,实现比较简单,但缺点是静止或低速时反电动势信号很小,难以得到有效的转子位置,系统低速性能比较差;②定子电感法,它利用电机绕组电感和转子位置的一定对应关系,通过重构的中性点电位代表位置信息,因此低速性能有所提高,但这种方法需要对绕组电感进行实时检测,增加了实现的难度。另外,如续流二极管法、磁链估计法和状态观测器法等,不同程度上改善了低速性能,但增加了控制难度,系统的动静态特性都不够理想,其限制了直流无刷电机的应用。文献[8]在低速和高速时,分别在PWM 关断和开通阶段检测反电动势,采用2 个不同的参考电压获得反电动势过零点,它不需位置传感器和电流传感器,但增加了硬件电路的复杂性。文献[9]通过比较悬空相绕组端电压和逆变器直流环中点电压的关系,获得反电动势过零点,该方法无需重构电机中性点,不使用滤波电路,但仍需采用硬件电路比较得到过零点。文献[10]提出了一种基于绕组电感与转子位置的关系,解决无刷直流电机中低速无传感器运行的问题,但该方法具有很大的滞后性,实时性较差。
因此本文提出了一种基于卡尔曼滤波方法的无刷直流电机的反电动势检测改良新方法,该方法将相电流和反电动势作为状态变量,在无刷直流电机数学模型的基础上进行推导,得到卡尔曼滤波模型。该算法不需要任何额外的检测电路,具有实现稳态和瞬态准确换向,能对电机转速进行精确控制,在很大程度上克服了直接反电动势法的抗干扰能力差、计算延迟和低通滤波相移等问题。
2 反电动势检测基本原理
普通无刷直流电机采用三相电压型逆变器供电,其定子绕组为星形联结,如图1 所示。由于无刷直流电机中点n 一般不引出,所以很难准确构建相电压方程[7-9],为此考虑构建线电压方程,将上述三相相电压两两相减即可得到线电压表达式[5,7]为
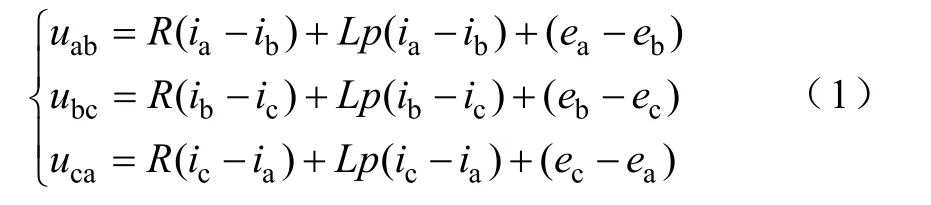
式中p——微分算子,d/(dt);
R——定子电阻;
L=LS−M;
Ls——定子相绕组自感;
M——定子相绕组互感。

图1 三相无刷直流电机主电路图Fig.1 Three-phase brushless DC circuit diagram
进一步考虑线电压的差值,以uab与ubc为例,将uab与ubc相减得到

假设a 相和c 相导通,b 相不导通,则ea+ec=0(理想反电动势和电流曲线见图2),而由无刷直流电机三相定子绕组星形联结可知:ia+ib+ic=0,则式(2)可以简化为

即

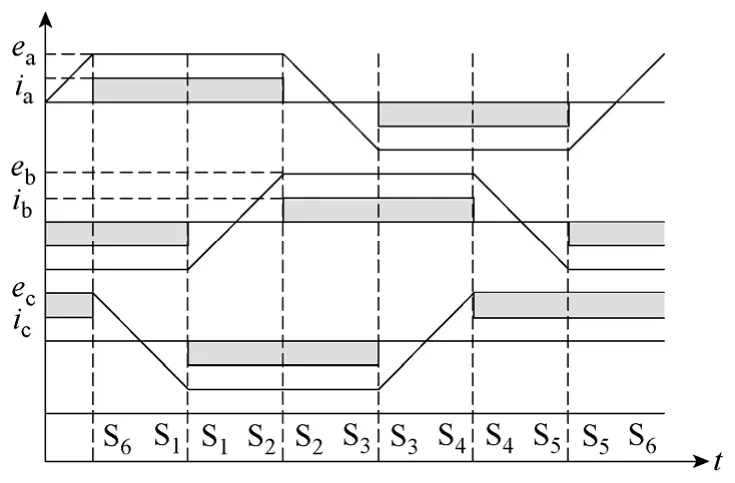
图2 理想反电动势、电流波形Fig.2 Ideal back-EMF voltage and current waveform
3 扩展卡尔曼滤波器原理
卡尔曼滤波方法是系统噪声正态分布时,这种滤波给出了状态的最小方差估计,当不是正态情况时,这种滤波给出了状态的线性最小方差估计。卡尔曼滤波是在线性基础上发展起来的,然而实际系统往往都不是线性的。电机系统就是一个非线性系统,对于非线性系统问题的应用关键是非线性方程的线性化问题。在此基础上关于离散线性系统的卡尔曼滤波估计公式可以推广应用于连续的非线性系统[11]。设非线性微分方程为

式中,x为系统的状态矢量;U为系统的干扰函数矢量。
则两个雅克比矩阵分别为


即线性干扰方程[11-14]。具有初始条件x(t0)=x0时,线性非齐次微分方程的解是

状态转移矩阵φ(t,t0)是 dφ(t,t0)/(dt)=F(t)·φ(t,t0)的解。初始条件G(t)dt,则式(9)可写成如下差分方程形式

测量方程线性化,设
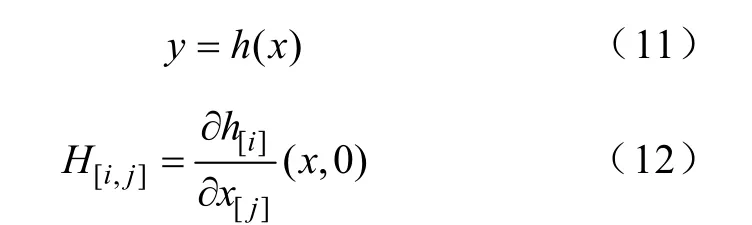
则式(11)写成

显然在式(8)和式(13)中附加白噪声序列Wk-1和Vk,便完成了卡尔曼滤波器的非线性化问题[11-14]。
以下是构造扩展卡尔曼滤波器的一般步骤[10,11]:(1)计算状态预报值

(2)状态误差协方差矩阵

(3)卡尔曼滤波器增益

式中,Rk为噪声协方差;K(k+1)是tk+1=(k+1)T时刻的卡尔曼滤波器增益。
(4)状态误差协方差矩阵的更新

式中,1ky+是 1kt+时刻观测方程的测量值。
(5)状态预报值更新

式中,1ky+是 1kt+时刻观测方程的测量值。
4 利用卡尔曼滤波器进行反电动势估计
由于式(4)中ib、ubc和uab可以测量,这里作为已知状态变量;由于eb不可以直接测量,作为未知状态变量。则式(4)可以写成
式中

上式中将反电动势看作未知的扰动信号,而这个扰动信号可以由以下差分方程来描述

式中,I是单位矩阵;δ是多项式w的次数,且δ≥1;ai是未知矢量的系数。

当没有扰动时,可令ai=0。以上的方法通过改变多项式的次数可以描述大多数的扰动信号和一些未知扰动信号,因此,不失一般性,在动态系统中扰动模型式(22)和式(23)是完全可观的[12],所以,反电动势方程可由引入扰动的差分方程来描述

式中
同理,可得其他两相的状态模型,最终可得系统状态模型

式中x=(iaeaibebicec)T;

式(26)和式(27)中附加白噪声序列Wk-1和Vk,便完成了无刷直流电机反电动势检测的卡尔曼滤波非线性化问题。
利用第3 小节所述方法进行迭代运算,便可得到电机运行时的反电动势值,当相电流接近零,且反电动势为零时进行换向,便可对电机进行控制。
5 速度和位置计算
以上利用卡尔曼滤波器可以估计出各相反电动势的大小,这里利用估计出的反电动势的值,通过简单的计算可估计出电机的速度和位置[15-18],具体如下:

式中E——反电动势的幅值;
Ke——反电动势常数;
ωe——电机的电角速度,ωe=E/Ke。
进而可得到电机的转子位置

式中θ——转子位置角;
θ0——转子初始位置角。
6 实验验证
基于扩展卡尔曼滤波的反电动势估计无刷直流电机速度控制系统框图如图3 所示,图中ωm=2ωe/p,式中,ωm为电机的机械角速度;p为电机的磁极对数。

图3 系统控制结构框图Fig.3 The framework diagram of the control system
根据系统控制框图构建其实验平台,整个控制平台以TI 公司的TMS320VC33 DSP 芯片为核心,以三菱智能IPM 为驱动模块组成的BLDC 拖动控制实验平台。其中图4 为实验控制系统,无刷直流电机主要参数为:额定电压310V,额定转矩15Nm,额定转速1 000r/min,极对数为2 极,反电动势常数是0.175,定子电阻1.5Ω,定子电感4.22mH。

图4 BLDC 控制实验平台Fig.4 The experiment flatform of BLDC
系统实验分三个部分:
(1)当0~1s 给定线性转速到1 000r/min,空载时结果如图5 所示。
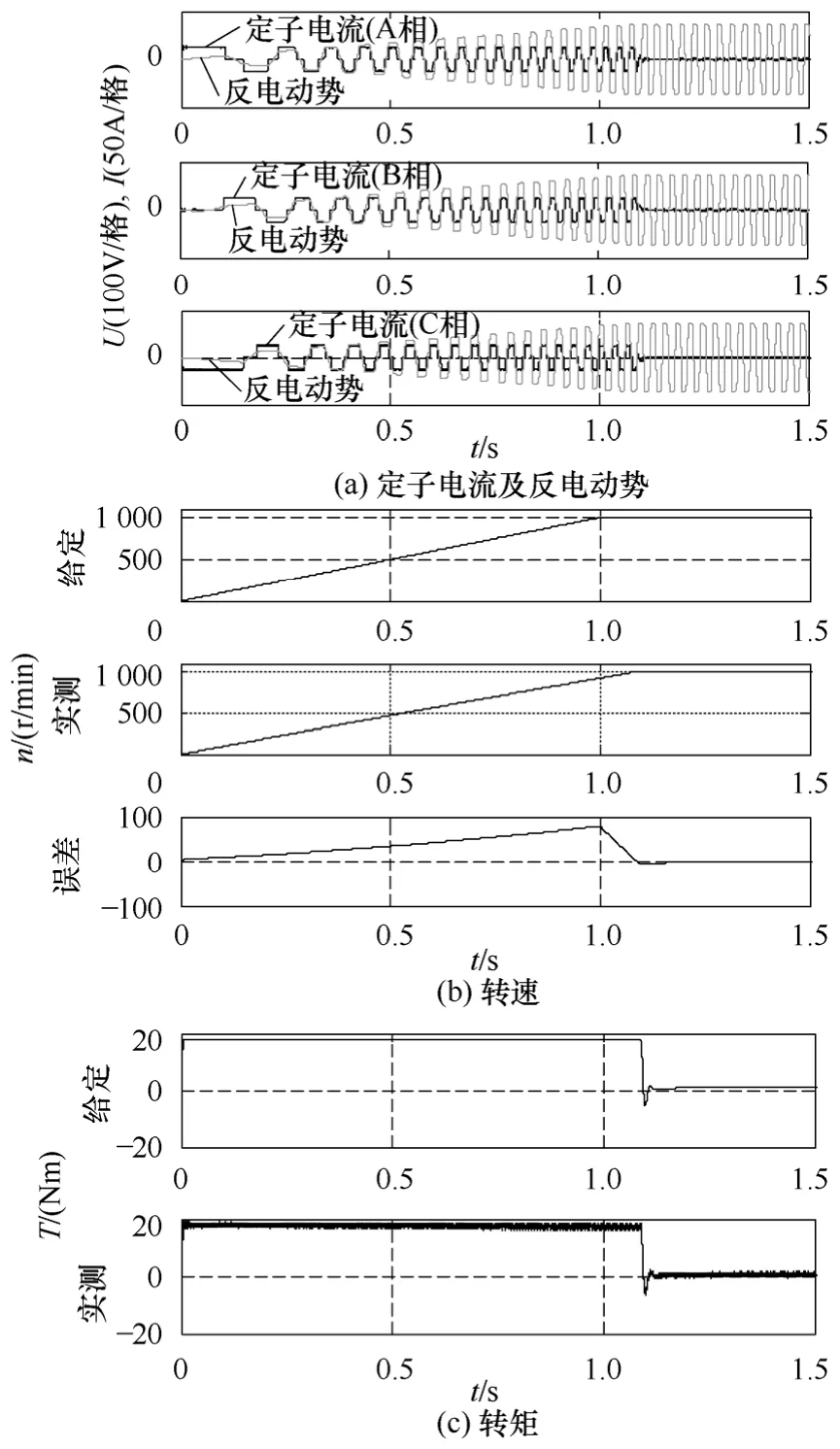
图5 空载时无刷直流电机对应波形Fig.5 The wave of BLDC for no load
从图5a 可以看出理想的反电动势和电流曲线非常接近,实现了当相电流接近为零和反电动势过零检测,无明显的续流现象。从图5b 可以看出在电机起动瞬间速度跟踪的偏差近似呈线性增加当达到1s 时迅速下降,并带有小量的超调现象,过渡过程大概0.1s,随后进入稳态,稳态时无偏差。图5c 描述了转矩跟踪情况,从图中可以看出转矩的跟踪情况较好,无明显偏差。
(2)当0~1s 给定线性转速到1 000r/min,2s突加15Nm 转矩时结果如图6 所示。

图6 突加负载时无刷直流电机对应波形Fig.6 The wave of BLDC for impact load
由图6a 可以看出理想的反电动势和电流曲线非常接近,实现了当相电流接近为零和反电动势过零检测,无明显的续流现象;开始随着转速的增加,电流和反电动势均随之增加,当1.1s 达到给定转速时电流和反电动势基本不变;当2s 时转矩突变,电流和反电动势又随之增大经过0.2s的时间又进入另 外一个稳态。图6b 中看出系统启动时随着速度的增加,转速偏差也近似地呈线性增加,当时间达到1s时转速偏差达到最大值 80r/min,随后偏差迅速减小。随着转速的增大,伴随有少量的超调现象,但是过渡过程很短,大概0.2s的时间,随后进入稳态;当2s 时突加15Nm 转矩时,转速有少许的降落,经过0.2s的调整时间进入稳态。图6c 中可以看出实际的输出转矩可以很好地跟踪给定转矩。
(3)当0~1s 给定线性转速为1 000r/min,2s时突加15Nm 转矩,3s 给定线性转速到50r/min 时结果如图7 所示。
由图7a 中可以看出理想的反电动势和电流曲线非常接近,实现了当相电流接近为零和反电动势过零检测,无明显的续流现象;开始随着转速的增加电流和反电动势均随之增加,当1.2s 时达到给定转速,电流和反电动势基本不变,当2s 时转矩突变,电流和反电动势又随之增大经过0.2s的时间又进入 另外一个稳态;当3s 时给定转速给定下降,电流和反电动势迅速减小,经过短暂的过度过程进入稳态;当3.8s 时转矩突然反向,这时电流也迅速改变方向,经过大概0.4s的过渡时间进入稳态。图7b 中看出系统启动时随着速度的增大,转速偏差也随之增大,当时间达到1s 时速度偏差达到最大值,随后偏差迅速减小,在1.2s的时候进入稳态;当时间到达2s时由于外加转矩突变产生了转速降落,经过0.3s的时间才进入稳态,不过转速降落的幅度很小;当时间到达3s 时,转速指令由1 000r/min 变成50r/min,变化瞬间转速有少量的偏差,0.2s 后就可以很好的跟踪给定转速;在3.8s 时由于转矩的突变,转速瞬间出现了降落,经0.3s的时间进入稳态。从图7c可以看出实际的输出转矩可以很好地跟踪给定转矩。
7 结论
本文针对传统直流无刷电机无位置传感器检测方法过于复杂、实时性差,提出了一种基于卡尔曼滤波器的无刷直流电机反电动势过零检测改良新方法,并在TI 公司的DSP 芯片为核心的实验平台上进行了实验验证。理论和实验结果表明该算法的可行性,并且该算法简单,无需复杂电路检测,能进行准确的换向,使电机转速精确控制,具有较高的应用价值。
[1]宋海龙,杨明,范宇,等.无刷直流电动机的无位置传感器控制[J].电机与控制学报,2002,6(3):208-212.Song Hailong,Yang Ming,Fan Yu,et al.Review of sensorless control of brushless DC motor[J].Electric Machines and Control,2002,6(3):208-212.
[2]周艳青,尹华杰,叶长青.无位置传感器无刷直流电机位置检测技术[J].电机与控制应用,2007,34(7):1-5.Zhou Yanqing,Yin Huajie,Ye Changqing.Position detection for position sensorless brushless DC motor[J].Electric Machines & Control Application,2007,34(7):1-5.
[3]Kim T H,Ehasani M.Sensorless control of the BLDC motors from near-zero to high speeds[J].IEEE Trans.on Power Electronics,2004,19(6):1635-1645.
[4]Shao Jianwen,Dennis Nolan.A novel direct back EMF detection for sensorless brushless DC(BLDC)motor drives[C].17th Annual IEEE Conference and Exposition on Applied Power Electronics,2002,1:33-37.
[5]张磊,瞿文龙,陆海峰,等.一种新颖的无刷直流电机无位置传感器控制系统[J].电工技术学报,2006,21(10):26-30.Zhang Lei,Qu Wenlong,Lu Haifeng,et al.A novel sensorless control system of brushless DC motors[J].Transactions of China Electrotechnical Society,2006,21(10):26-30.
[6]王宏伟,梁晖.无位置传感器无刷直流电机的DSP控制[J].电力电子技术,2005,39(6):102-104.Wang Hongwei,Liang Hui.DSP control of brushless DC motor without position sensor[J].Power Electronics,2005,39(6):102-104.
[7]Shao Jianwen.An improved microcontroller-based sensorless brushless DC(BLDC)motor driver for automotive applications[J].IEEE Transactions on Industry Applications,2006,42(5):1216-1221.
[8]李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):38-44.Li Zhiqiang Xia Changliang Chen Wei.A position sensorless control strategy for BLDCM based on line back-EMF[J].Transactions of China Electrotechnical Society,2010,25(7):38-44.
[9]Jiang Quan,Bi Chao.A new phase-delay-free method to detect back EMF zero-crossing points for sensorless control of spindle motros[J].IEEE Transactions on Magnetics,2005,41(7):2287-2294.
[10]王华斌,刘和平,张毅,等.计及中性点电压的无刷直流电机无位置传感器控制[J].电工技术学报,2009,24(7):46-51.Wang Huabin,Liu Heping,Zhang Yi,et al.Sensorless BLDC drive allowing for neutral point voltage[J].Transactions of China Electrotechnical Society,2009,24(7):46-51.
[11]敬喜.卡尔曼滤波器极其应用基础[M].北京:国防工业出版社,1973.
[12]Tae Sung Kim,et al.A new approach to sensorless control method for brushless DC motors[J].International Journal of Control,Automation,and Systems,2008,6(4):477-487.
[13]Gunabalan R,et al.Sensorless control of induction motor with extended Kalman filter on TMS320F2812 processor[J].International Journal of Recent Trends in Engineering,2009,2(5):14-19.
[14]林海,严卫生,林洋,等.双扩展卡尔曼滤波的无刷直流电机无传感器控制[J].西北工业大学学报,2010,28(2):197-201.Lin Hai,YanWeisheng,Lin Yang,et al.Applying dual extended Kalman filter(DEKF)theory to sensorless control of brushless DC motor(BLDCM)[J].Journal of Northwestern Poly Technical University,2010,28(2):197-201.
[15]Jang G H,Kim M G.Optimal commutation of a BLDC motor by utilizing the symmetric terminal voltage[J].IEEE Transactions on Magnetics,2006,42(10):3473-3475.
[16]邹继斌,江善林,张洪亮.一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009,24(4):48-53.Zou Jibin,Jiang Shanlin,Zhang Hongliang.A novel method of detecting for rotor position of a sensorless brushless DC motor[J].Transactions of China Electrotechnical Society,2009,24(4):48-53.
[17]吴小婧,周波,宋飞.基于端电压对称的无位置传感器无刷直流电机位置信号相位校正[J].电工技术学报,2009,24(4):54-59.Wu Xiaojing,Zhou Bo,Song Fei.A new control method to correct position phase for sensorless brushless DC motor[J].Transactions of China Electrotechnical Society,2009,24(4):54-59.
[18]Yen Shin Lai,Fu Shan Shyu.Novel back-EMF detection technique of brushless DC motor drives for whole duty-ratio range control[C].The 30th Annual Conference of the IEEE Industrial Electronics Society,Busan,Korea,2004,3:2729-2732.