移动机器人动力学控制半物理仿真研究
2013-07-03叶锦华郑炳坤
叶锦华,郑炳坤,李 迪,叶 峰
(华南理工大学 机械与汽车工程学院,广东 广州 510641)
0 引 言
移动机器人在探索人类无法到达的未知和危险地域优势突出,已广泛地应用于工农业、国防等各个领域,对其进行相关技术研究意义重大。运动控制是移动机器人的核心研究内容之一,为了让其能更接近“完美的速度跟踪”,应当考虑系统的动力学模型[1]。在控制方法验证上,采用实际实验时[2],移动机器人动力学系统的相关参数往往不易测量和调整,不利于控制方法的快速验证,延长了系统的开发周期,而采用纯数值仿真[3],由于无法获得系统的精确数学模型,往往忽略了实际系统的某些特性和参数,设计的控制器在实际系统中不定可用,为了解决上述问题,本文引入半物理仿真的概念。半物理仿真直接将控制对象连接在仿真系统中,因此也称之为硬件在环(Hardware-In-The-Loop,HIL)[4]仿真,它是对实际过程进行的实时仿真,由于物理实体被引入到仿真回路中,因此比纯数值仿真的置信度高,同时通过合理设计物理实体和仿真系统,可以获得较为精确的系统模型,并方便系统参数的调整和复杂控制方法的测试,仿真过程结果的验证直观,操作简便。
本文结合Matlab/Simulink仿真软件与Quanser公司的Q8卡、QuaRC 开发环境和工业机电驱动单元(Industrial Mechatronic Drives Unit,IMDU),以轨迹跟踪控制为例,建立了(2,0)[5]型轮式移动机器人(WMR)的动力学控制半物理仿真系统,试验结果表明所设计的系统满足所需性能指标,达到预期的设计要求。
1 Quanser仿真平台简介
Quanser公司的Q8卡[6]是一块集实时检测和控制于一体的高性能板卡,它提供了丰富的硬件接口和完善的软件支持,带有多路的高速A/D 输入、高精度D/A 输出,编码器输入、扩展数字I/O和PWM 输出。Q8卡使用PCI接口连接计算机,并通过终端接口卡连接各种外部设备,形成闭环控制结构。
QuaRC[7]是Quanser的下一代多功能快速控制开发环境,它无缝集成在Simulink中。利用QuaRC提供的框图模块,并结合Simulink,用户可以方便快速地搭建自己的系统模型,然后通过QuaRC自动生成实时代码,将工业级的实时应用程序下载到Windows或QNX 等操作系统中,还可以通过QuaRC提供的“外部模式”通讯模块将实时代码下载到目标板卡上,实现对Quanser板卡的软件控制。借助Simulink中的各种监测模块,用户可以实时观测整个系统的运行状态,从而增强了工程的可管理性同时降低了开发成本与时间。
IMDU[8]是一个可模拟各种工业控制单元的装置系统,每个IMDU 主单元共有四根输出轴,其中两根是直流电机驱动轴,其余为自由轴,利用单个或多个IMDU 主单元及其丰富的模块化组件,可以搭建带有卷绕控制、间隙与摩擦补偿,高阶耦合系统等的各种复杂工业控制系统。IMDU提供电机力矩(电流)环的控制和反馈,且每根轴都配有高精度编码器,IMDU 与Q8终端接口卡使用配套标准数据线进行连接。
2 WMR的动力学模型与控制器
2.1 WMR 动力学模型分析
半物理仿真对象(2,0)型WMR的机械结构如图1所示,它由车体及两个独立驱动轮组成,通过控制两驱动轮的不同转速来实现其各种运动形式。建立WMR的惯性坐标系为X0O0Y0,局部坐标系为XcOcYc,Oc位于WMR的质心,θ为WMR的导向角度,v和w分别为WMR的线速度和角速度。两驱动轮间的距离为2b,轮子半径为r。
定义WMR的位姿为q=[xcycθc]T,右左轮的转速为ψ=[φr φl]T,不失一般性,假设WMR 各轮为无变形的刚体,且在水平面运动,同时忽略表面摩擦、向心力和哥氏力,由于各轮受非完整约束,即满足纯滚动和无滑动的条件,其完整运动学及动力学方程可表示为[9]
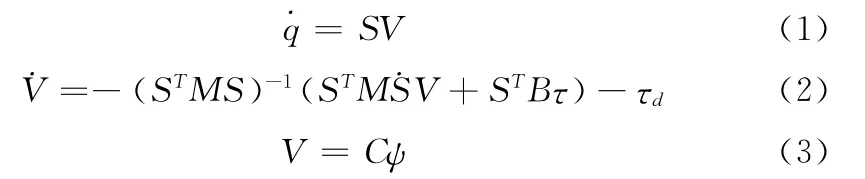
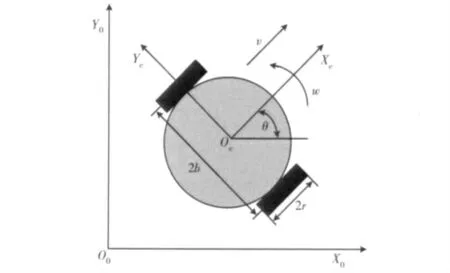
图1 WMR的结构
式中:S——WMR的广义Jacobian 矩阵;M ——系统惯性矩阵;V=[v w]T——速度输入矢量;τd——未知外界扰动;B和C——变换矩阵;τ=[τrτl]T——两轮控制力矩输入矢量。各矩阵取为
式中:m——整车质量,I=mb2/4——车体绕质心轴的转动惯量。
2.2 WMR 轨迹跟踪动力学控制器
qr满足如下等式
式中:Vr=[vrwr]T——参考速度输入矢量,定义跟踪误差为
基于反演(Backstepping)方法取得运动学控制器为[10]

式中:kx,ky,kθ——正的常数,采用非线性反馈设计加速度控制输入u为

式中:kv——正的常数矩阵。最后应用计算力矩法取得两轮的控制力矩为

控制力矩再转换为IMDU 直流电机的驱动电流Ic,转换关系式为

式中:kg——电机输出到轮轴的减速比,kt——电机力矩常数。
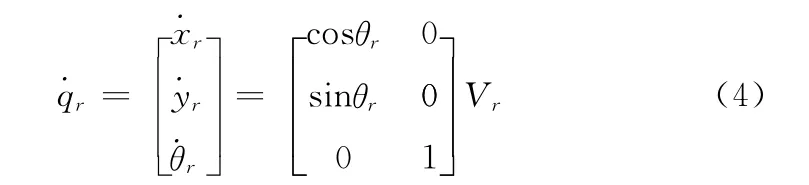
3 半物理仿真系统的软硬件实现
3.1 系统总体结构
WMR 动力学控制半物理仿真系统总体结构如图2所示。
图2 系统总体结构
系统使用IMDU 构建WMR的动力学系统,WMR 轨迹跟踪的软件控制在Simulink上实现,并通过QuaRC实现计算机与Q8卡的实时数据交互。Simulink将实时控制过程中计算得到的相关数据传递给Q8卡,Q8卡再通过终端接口卡输出驱动电流给IMDU,实现WMR 两轮的力矩控制,同时IMDU 通过终端接口卡将电机的实际驱动电流与增量式编码器信号反馈给Q8卡,经Q8卡处理后,得到WMR力矩和速度反馈值返回给计算机,从而实现WMR 轨迹跟踪的闭环动力学控制。
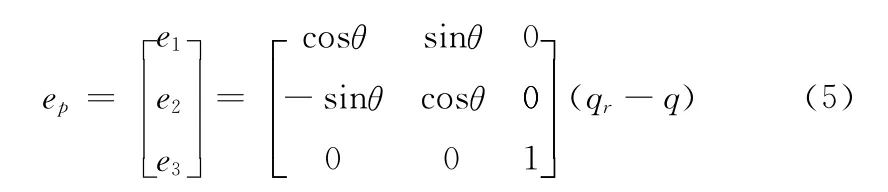
3.2 硬件实现
基于IMDU 构建的WMR 动力学系统如图3所示。
图3 基于IMDU 构建的WMR 动力学系统
IMDU 两驱动轴1、2为WMR的转动轮轴,刹车鼓组件3作为WMR的转动轮,摩擦制动单元4模拟WMR 车身重量对轮子的压力,并形成WMR 运动的摩擦阻力,压力值可通过旋转组件4的螺丝钉来调节,并可用测力计测得具体数值,定义压力值为T,则WMR 车身的质量为m=2T/g,式中,g为重力加速度。
3.3 软件实现
动力学模型下,WMR 轨迹跟踪控制的总体控制结构如图4所示,它由三个控制环组成,即位置控制环,速度控制环和电流控制环。
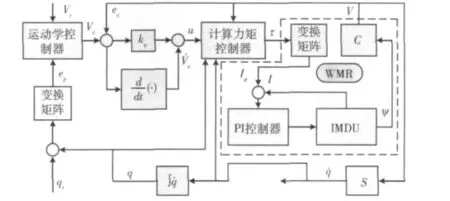
图4 WMR 轨迹跟踪控制的总体控制结构
系统运行时,位置控制环根据WMR 反馈位姿取得位置控制偏差ep,并结合参考速度Vr,由运动控制器式(6)得到速度环的参考输入Vc,然后速度控制环根据IMDU 编码器反馈获得的速度反馈值V ,取得速度控制偏差ec,由速度控制器式(7)和计算力矩控制器式(8)得到电流环的参考输入力矩τ,并经过转换式(9)得到IMDU的参考输入电流Ic,最后电流控制环根据IMDU的电流反馈值取得电流控制偏差,并通过PI控制器得到最终IMDU电机的控制输入电流。IMDU的输出为两电机轴即WMR两轮的转速ψ,应用式(3)ψ 可转换为V ,再通过式(1)取得WMR 位姿的变化,最后使用积分运算获得WMR的当前位姿反馈值。
基于上述控制过程,在Simulink 仿真环境下创建WMR 轨迹跟踪的半物理仿真模型如图5所示,它由参考轨迹生成单元、位置控制器、速度控制器、WMR 动力学系统(含电流环)及反馈值计算单元五个部分组成。
系统运行过程中,动态参数如WMR 时变导向角θ 作为仿真模块的输入影响整个系统的输出,不方便使用全局变量来进行传递,为了保证动态参数的实时传递,实现时变矩阵的动态运算,本文采用S-Function来实现,S-Function提供给用户自己编写程序来满足自己要求模型的接口,可以实现复杂函数信号的生成及Simulink自带模块难以实现的信号运算,利用Simulink提供的各种S-Function模板,我们可以很方便实现所需功能的S-Function模块,并有利于提高程序的运行效率。
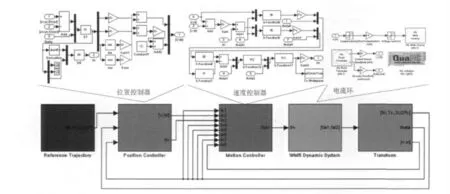
图5 WMR 轨迹跟踪的半物理仿真模型
仿真模型运行在RTW 环境下,安装QuaRC 后,在Simulink参数配置选项卡中,选择Real-Time WorkShop中的“system target file”为“quarc.windows.tlc”,即可实现以QuaRC Win32为目标的实时仿真。C-MEX S函数是实现RTW的接口,因此在仿真模型中我们使用C 语言形式 的S-Function,完 成 后的S-Function 再 通 过“mex filename.c”方法编译成filename.mexw32形式的mex文件供系统使用。
4 仿真试验
图6所示为整个系统的硬件实物图,移动机器人的机械模型参数为:r=0.03m,b=0.12m,m=4kg,齿轮减速比为:kg=3,电机力矩常数为:kt=0.0612 N·m/A。本文针对直线和圆弧两类参考轨迹进行跟踪试验。在文中设计的WMR 半物理仿真模型下,我们可以很方便地调整各个参数和控制模块,并快速取得较为理想的控制参数,试验取得位置控制器参数为:kx=0.8,ky=1.2,kθ=1;速度控制器参数为:kv=40;直流电机PI控制器参数为:kI=4,kP=2。系统采样周期为:Δt=0.001s,仿真时间为:t=80s,
直线参考轨迹为:

圆参考轨迹为:

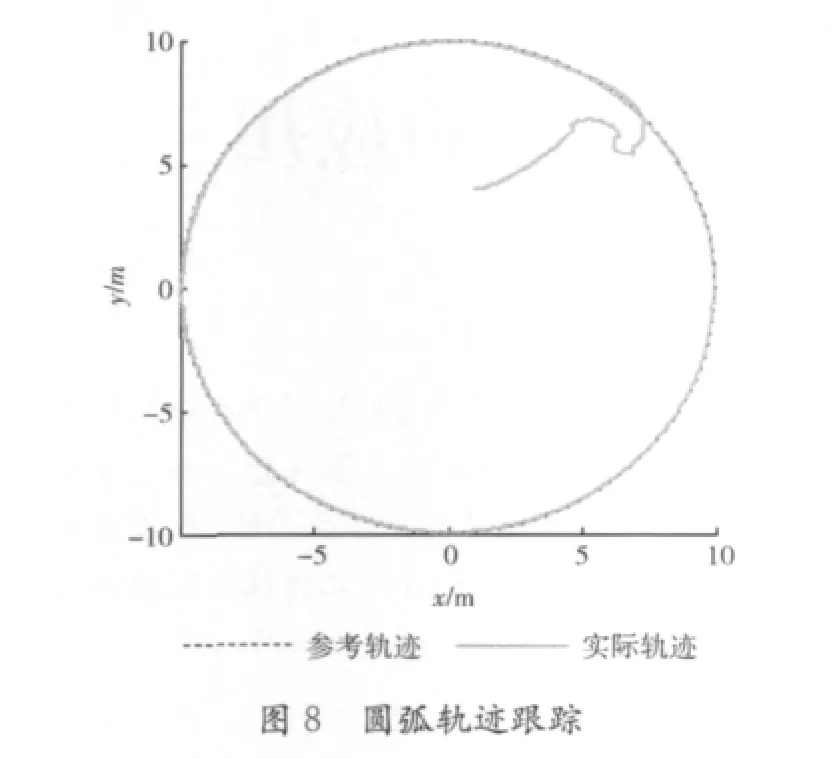
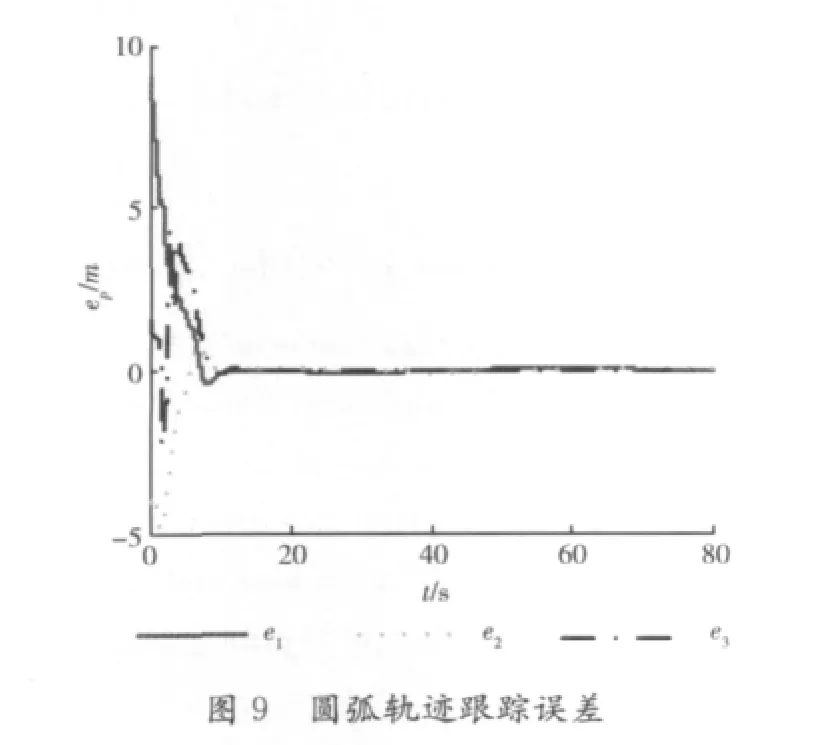
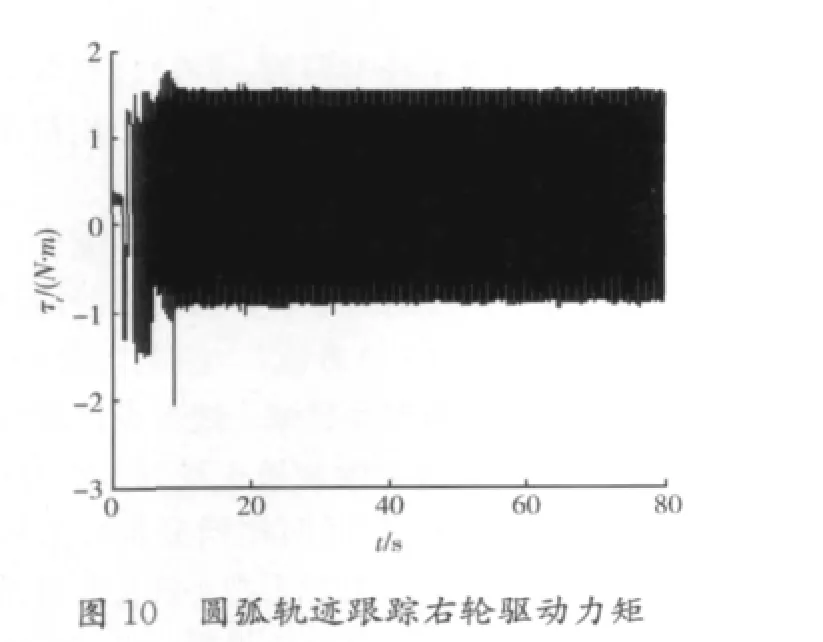
移动机器人起始位姿取:q=(1,4,0)。通过多次试验,发现系统存在一定的固有误差,我们直接进行了补偿。直线和圆轨迹跟踪的仿真结果如图7、图8所示,圆轨迹跟踪误差如图9 所示,右左轮控制力矩曲线图分别如图10、图11所示,由图可知,半物理仿真系统较好地反映实际WMR 系统的运行特性,控制器达到较好的控制效果。
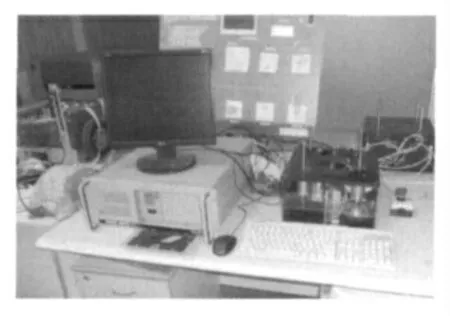
图6 WMR 半物理仿真系统的硬件实物
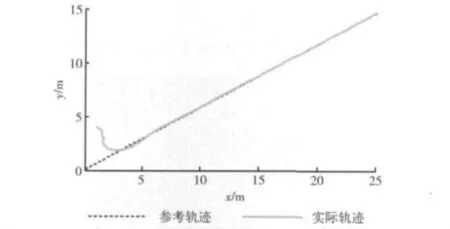
图7 直线轨迹跟踪
5 结束语
本文针对WMR 动力学控制实验研究使用实际系统参数不易测量和调整,而纯数值仿真无法完全反映系统特性的不足,提出一种基于Quanser的半物理实时仿真实现方法,该方法使用IMDU 构建WMR 物理系统,利用Simulink和QuaRC实现仿真系统建模,以Q8卡作为通信中介,进行反馈数据采集和物理对象的实时控制,从而实现半物理仿真系统的闭环控制,对WMR 轨迹跟踪控制试验表明该方法下,系统较好反映系统真实特性,参数调整方便,操作简便,验证过程直观,有利于各种控制器的快速构建和验证,方便进行WMR的动力学控制研究。值得一提的是基于本文方法,通过增加IMDU 主单元的个数,还可以实现多机器人的半物理仿真,并可推广应用到其他多自由度的机器人系统。
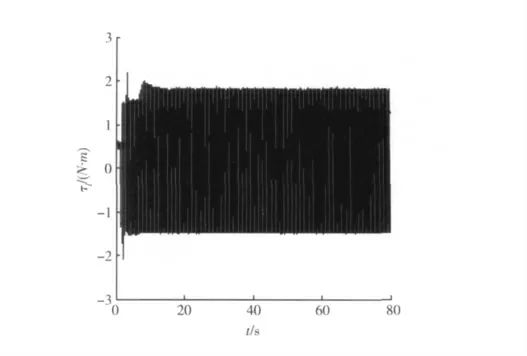
图11 圆弧轨迹跟踪左轮驱动力矩
[1]WANG Zongyi,LI Yandong,ZHU Ling.Dual adaptive neural sliding mode control of nonholonomic mobile robot[J].Journal of Mechanical Engineering,2010,46(23):16-21(in Chinese).[王宗义,李艳东,朱玲.非完整移动机器人的双自适应 神 经 滑模 控 制[J].机 械 工 程 学 报,2010,46(23):16-21.]
[2]Dax T,Kar I N.Design and implementation of an adaptive fuzzy logic-based controller for wheeled mobile robots[J].IEEE Transactions on Control Systems Technology,2006,14(3):501-510.
[3]LIU Yu,ZHOU Chuan,ZHANG Yan,et al.Tracking control of wheeled mobile robots based on RBF neural networks[J].Computer Engineering and Design,2011,32(5):1804-1806(in Chinese).[刘钰,周川,张燕,等.基于RBF神经网络的轮式移动机器人轨迹跟踪控制[J].计算机工程与设计,2011,32(5):1804-1806.]
[4]Shahram K,Philippe P,Shahrokn S.An HIL-based reconfigureable platform for design,implementation and verifycation of electrical system digital controllers[J].IEEE Transactions on Industrial Electronnics,2010,57(4):1226-1236.
[5]YE Jinhua,WU Haibin,CHEN Tianyan.The research on motion controller of mobile robot[J].Machinery Design & Manufacture,2008,6(6):145-147(in Chinese).[叶锦华,吴海彬,陈天炎.移动机器人运动控制系统研究[J].机械设计与制造,2008,6(6):145-147.]
[6]Quanser Consultina.Inc Q8data acquisition system user's guide version 1.2.[Z].Markham,Ontario,Canada:Quanser Consulting,Inc,2007.
[7]Quanser Consultina,Inc Quanser Consultina,Inc.Qua-Rc 1.2User Manual[Z].Markham,Ontario,Canada:Quanser Consulting,Inc,2007.
[8]Industrial mechatronic drives unit(IMDU)user mannual[Z].Markham,Ontario,Canada:Quanser Consulting,Inc,2007.
[9]YE Jinhua,LI Di,YE Feng,et al.Adaptive backstepping sliding mode control of uncertain Nonholonomic AGV[J].Journal of South China University of Technology:Natural Science Edition,2011,39(12):32-37(in Chinese).[叶锦华,李迪,叶峰,等.不确定非完整AGV的自适应反演滑模控制[J].华南理工大学学报(自 然科学版),2011,39(12):32-37.]
[10]CAO Zhengcai,ZHAO Yingtao,WU Qidi.Adaptive trajectory tracking control for a Nonholonomic mobile robot[J].Chinese Journal of Mechanical Engineering,2011,24(3):1-7.
