基于ADAMS的电容器引线焊接机送丝机构运动学分析*
2013-06-28唐勰
唐 勰
(沙洲职业工学院,江苏 张家港 215600)
1 引言
铝电解电容器是电子线路中非常重要的电子元器件。其作用概括为:通交流、阻直流,具有滤波、旁路、耦合和快速充放电的功能,并具有体积小、储存电量大、性价比高的特性。随着现代科技的进步与电容器性能的不断提高,铝电解电容器已广泛应用于消费电子产品、通信产品、电脑及周边产品、新能源、自动化控制、汽车工业、光电产品、高速铁路与航空及军事装备等。电容器引线(又称为导针,如图1所示)作为电容器正负两极薄膜上的引出线,是制造电容器的主要零部件。引线是将纯铝线和镀锡铜包钢线焊接到一起,然后进入到由凸轮驱动的冲压切边模具将铝棒端打扁并按尺寸要求切除多余材料而获得[1]。

图1 导针实物
2 电容器引线焊接机结构说明
铝电解电容器引线焊接机,如图2所示,是为了生产铝电解电容器的引线而研制开发的一种专门设备,该机器结构设计精妙,零件种类较多,装配精度要求较高。该设备主要由线材校直部件、线材(铝线、CP线)送进部件、铝线切断部件、CP线(镀锡铜包钢线)切断部件、焊接部件、二分割传送部件、八分割传送部件、冲压切边模具部件、检测部件、传动部件、机架部件、电气控制部件等组成。它能自动完成将特定长度的CP线、铝线切断后焊接在一起、并且将铝线部分打扁、切脚,制成铝电解电容器所需要的引线,由于该设备加工速度比较快,使用强度较高,对可靠性提出了较高的要求。

图2 引线焊接机虚拟样机
3 送线机构的特点及功能分析
送丝机构的组成:铝电解电容器送丝机构主要由矫直部分和送丝部分组成。由前述知,电容器引线的原料是铝线和CP线,而CP线、铝线都是成圈状安放在送料桶中,其本身或正旋、或逆旋(左、右旋)都存在弯曲挠度及直线性不良的情况,所以在焊接前必须先经过送丝机构的直线器(如图3所示),对铝线和CP线进行调直,这样CP线和铝线熔接在一起后才能得到笔直的导针丸棒,才能保证CP线和铝线有较好的对中性能,从而保证焊接后能达到标准规定的抗拉强度。电容器引线焊接机,是一台全自动工作的设备,送丝是整个加工环节中的一环,送丝机构处于设备的最前端,它的性能如何直接影响到后续的所有环节。送丝部分(如图4所示)是整个送丝机构的关键部件。它是铝线和CP线完好焊接,同时也是导针丸棒在进入模具冲压时准确定位的有力保证。所以对其进行仿真分析是非常有必要的,这也是保证生产优良导针的先决条件。
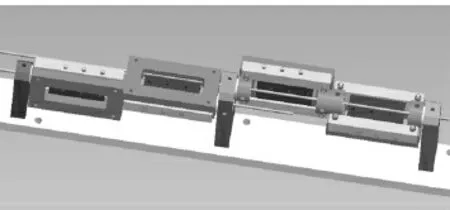
图3 直线器部件

图4 送丝机构模型
4 送丝机构的运动学仿真
4.1 仿真软件及过程简要说明
虚拟样机技术是利用软件所提供的各零部件的物理和几何信息,直接在计算机上对机械系统进行建模和虚拟装配,从而获得基于产品的计算机数字模型,即虚拟样机(virtual prototype),并对其进行仿真分析。这种方法使设计人员能在计算机上快速试验多种设计方案,直至得到最优化结果,从而免去了传统设计方法中物理样机的试制,从而大幅度缩短开发周期,减少开发成本,提高产品质量[2]。
ADAMS(Automatic Dynamic Analysis of Mechanical System)是世界上著名的动力学仿真软件,由美国MSC公司开发研制的集建模、求解、可视化技术于一体的虚拟样机软件[3]。进行仿真分析的模型既可以在ADAMS环境下直接建模,也可以从其它CAD软件中导入,一般情况都采用后者。本次分析首先是运用Pro/E构建了整个设备的三维实体模型,并且专门为送丝机构构建了简化的分析模型,通过mechanism/pro接口软件导入ADAMS2010中,构建了该部分的虚拟样机。
利用ADAMS对送丝机构进行仿真的过程大致分为:送丝机构几何建模、施加约束和载荷、送丝机构样机模型检验和仿真结果后处理、仿真结果比较分析,参数优化等几个阶段。通过对构件编辑材料属性,添加约束,施加驱动和载荷,对送丝机构进行运动学仿真分析。
4.2 送丝机构简化模型的构建
根据送丝机构的工作原理(送丝机构的装配模型由CP线送料凸轮机构、铝线送料凸轮机构组成,两个机构同步动作,保证CP线和铝线的同步送进),对其样机模型进行简化。简化的虚拟样机模型如图5所示。

图5 送丝机构简化模型
4.3 ADAMS虚拟样机模型的建立
分别创建转轴与大地之间的转动副,CP线送线凸轮及铝线送线凸轮与转轴之间的固定副,滚动轴承与推杆之间的转动副,推杆与直线导轨之间的移动副,直线导轨与大地之间用固定副连接。凸轮与滚子之间采用接触方式连接,在凸轮与滚子之间添加接触力,在推杆和导轨之间增加弹簧阻尼器,在仿真的过程中逐渐修改弹簧的刚度值[4]。ADAMS2010中的虚拟样机模型如图6所示。

图6 ADAMS中虚拟样机模型
4.4 仿 真
为样机模型添加驱动,根据需方对物理样机设计提出的要求(180支/min)来设置驱动,驱动值设置为每秒逆时针旋转1 080°,步长500,终止时间5 s。设置好后,对模型进行仿真,最后进入后处理模块,可以直接看到仿真效果,可以得出CP线推杆、铝线推杆的位移、速度、加速和以及由接触力和弹簧力等数据情况,仿真结果如图7~10所示。

图7 CP线送丝推杆运动情况
4.5 仿真结果分析
从分析图线可看出,CP线推杆、铝线推杆的运动情况的趋势是一致的,虽然数据上有一定出入,但这也为后续的参数优化指明了方向,通过调整合适的仿真参数可以找到最优的结果。弹簧力及接触力的情况也是正常的,通过更换不同刚度的弹簧参数,可以使物理样机性能达到最优化。
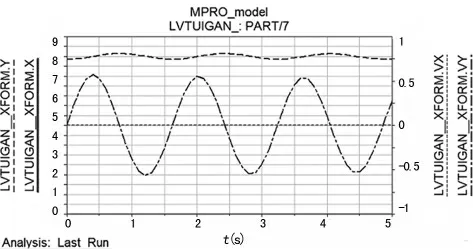
图8 铝线送丝推杆运动情况

图9 弹簧力及形变情况
5 结论
虚拟样机技术使机械结构的设计摆脱了对物理样机的依赖,利用虚拟样机技术可以快速地建立机构的动力学仿真模型,对机构的多种设计方案、各种性能进行测试评估、模拟仿真,可以在机构的设计初期和过程中及时发现问题,解决问题,不断改进,得到最好的性能和最优化的方案[5]。通过Pro/E和ADAMS接口程序,把Pro/E的模型导入ADAMS,从而实现两者之间的无缝连接,实现数据传输,充分发挥两个软件的专长,实现机械产品的高效仿真分析。从而可以方便地获得机构运动学和动力学特性曲线,分析方法和结果对机械结构的优化设计提供了较大帮助。大幅度缩短了开发周期,减少了开发成本,提高了产品质量。

图10 接触力情况
[1] 王 倩,徐荣建.电容器引线焊接机冲压切边凸轮的三维精确造型[J].沙洲职业工学院学报,2010(2):13-14.
[2] 王华杰.基于虚拟样机技术的含间隙转动铰曲柄滑块机构动力学仿真研究[J].襄樊学院学报,2007(11):58-61.
[3] 徐 芳,周志刚.基于ADAMS的凸轮机构设计及运动仿真分析[J].机械设计与制造,2007(9):78.
[4] 郑 凯,胡仁喜,陈鹿民,等.ADAMS2005机械设计高级应用实例[M].北京:机械工业出版社,2006.
[5] 韩晓明,王惠源.基于ADAMS/View机心凸轮机构分析与动态仿真[J].制造业信息化,2005(10):92-95.
