基于EKF的涡轮冲压组合发动机跟踪滤波器设计
2013-06-28侯营东戴冬红姜渭宇
侯营东,戴冬红,姜渭宇
(北京动力机械研究所,北京100074)
基于EKF的涡轮冲压组合发动机跟踪滤波器设计
侯营东,戴冬红,姜渭宇
(北京动力机械研究所,北京100074)
针对涡轮冲压组合发动机性能参数最优估计问题,介绍了一种基于EKF(扩展卡尔曼滤波)和在线发动机实时模型相结合的跟踪滤波器方案。跟踪滤波器感知模型输出与传感器测量值间的偏差,利用EKF滤波算法动态调整模型状态变量,使模型与发动机间的状态误差方差最小。仿真结果表明,在发动机工作状态发生显著变化时,基于EKF设计的跟踪滤波器能准确跟踪传感器输出,对发动机推力、空气流量、喘振裕度等参数有很高的估计精度。
EKF;涡轮冲压组合发动机;非线性;最优估计;跟踪滤波器;在线发动机实时模型
1 引言
涡轮冲压组合发动机(下面简称组合发动机)作为一种重要的天地往返运输系统和高超声速飞行器的动力装置,主要由涡轮发动机与冲压发动机通过结构和热力循环有机组合而成,在不同飞行马赫数下有着不同的工作模态,具有工作状态复杂、飞行包线宽广等特点。组合发动机结构和原理复杂,具有多处燃油供应和几何可调装置,控制变量较多且在输入输出之间存在严重的耦合,是一种典型的非线性多变量被控对象。
组合发动机多变量控制器设计过程中,被控量的选择至关重要。被控量最好能直观反映发动机的工作状态、安全裕度等信息,且能较好地匹配与飞行器总体的接口需求。对于组合发动机,实现其直接推力、空气流量、喘振裕度等参数的控制,能充分发挥发动机的性能优势,是一种比较理想的控制系统设计方案。然而实际应用中,上述参数大多无法直接测量,或由于发动机结构、工作环境限制不便直接测量。如何根据组合发动机控制输入和传感器测量数据等已知信息,准确估计输出反馈参数,是实现多变量控制的一个关键环节[1~4]。
2 EKF滤波方法
卡尔曼滤波(KF)[3,5]由于算法简单、易于实现,而广泛应用于惯性导航、制导、雷达通讯等航空航天领域。但其基于线性状态空间模型设计,主要适用于非线性不强的动态系统,并不适用于组合发动机这样比较复杂的非线性系统。扩展卡尔曼滤波(EKF)是一种在线性卡尔曼滤波基础上发展起来的非线性滤波方法,其核心思想是围绕状态估计对非线性系统进行一阶泰勒展开,然后再应用线性系统卡尔曼滤波器算法。
考虑如式(1)所示的非线性离散系统:

式中:x∈Rn为系统状态向量;y∈Rm为系统输出向量;u为已知控制输入;vk、wk分别为相互独立的过程噪声和测量噪声,一般被假设为零均值的高斯白噪声,其协方差矩阵分别为Q和R

EKF计算前需给定的初始条件,包括动态系统状态的初值x̂0和状态的初始协方差矩阵Px0:

在每个计算周期内,EKF算法主要包括以下五步:
(1) 状态先验估计。状态先验估计是根据非线性系统状态方程描述,利用先验知识对状态进行一步预测:

(2)误差协方差矩阵先验更新。对于式(1)中的状态方程,在估计值x̂k-1附近进行泰勒展开,忽略二阶及以上数值项可得状态转移的线性描述,如式(6)所示:

定义状态转移矩阵Φk,k-1:

由Φk,k-1可得先验估计后对应的状态误差协方差矩阵Px(k |k-1):

(3) 计算卡尔曼增益矩阵。对于式(1)中的输出方程,在先验估计值x̂k|k-1附近进行泰勒展开,忽略二阶及以上数值项可得观测输出的线性描述,如式(9)所示:
定义输出传递矩阵Hk:

可得卡尔曼滤波器增益矩阵Kk:

(4) 状态后验估计。根据步骤(3)得到的Kk,利用观测输出与测量值间的偏差进一步修正滤波器状态:

(5) 误差协方差矩阵更新。更新后验估计后的误差协方差矩阵,作为下一计算周期的协方差初值:

3 跟踪滤波器设计
不失一般性,组合发动机动态行为可表示为如下通用形式:

式中:x为发动机状态向量,均为EKF待估计参数;u为发动机输入向量,包括主燃烧室和超级燃烧室燃油流量、各几何可调机构面积和位置、飞行高度和马赫数等;y为发动机测点传感器测量输出变量,包括各截面的温度、压力,发动机传感器测量方案应保证y对x具有较好的可观性;θ为组合发动机中一些不可测性能参数,包括发动机推力、空气流量、喘振裕度等。
在组合发动机工作过程中,u为已知信息,跟踪滤波器设计的关键是准确估计系统中的x,使其估计值x̂能准确反映发动机的真实状态。获得x̂后,可根据计算推力、空气流量、安全裕度等相关发动机性能参数。
为准确估计组合发动机状态,考虑到系统非线性特性、系统过程噪声、传感器测量噪声等因素影响,采用了一种基于EKF和在线发动机实时模型的跟踪滤波器结构,如图1所示。
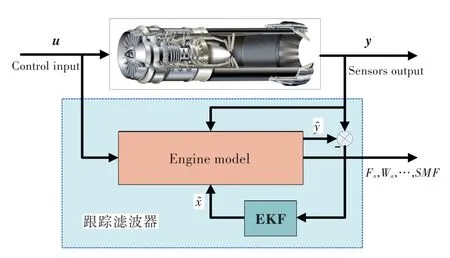
图1 组合发动机跟踪滤波器结构框图Fig.1 Structure diagram of tracking filter for TBCC
在线发动机实时模型的作用,是在给定u和x̂的条件下,对组合发动机传感器测点对应截面的温度、压力等参数ŷ进行解算,同时根据式(15)计算所需不可测性能参数。根据组合发动机测量方案,选取可观性较好的y用于EKF滤波计算[4],另外选取一些精度和可靠性较高的y直接参与实时模型计算。
EKF感知组合发动机模型输出ŷ与传感器测量值y间的偏差,结合系统描述式(14),按式(5)~式(13)的计算步骤动态调整x̂,使在线发动机实时模型与真实发动机间的状态误差方差最小。当x̂能真实反映x时,ŷ将准确跟踪相应的y值,此时根据计算出的发动机推力、空气流量、安全裕度等性能参数,即被认为可代表真实发动机的推力、空气流量和安全裕度。
4 仿真分析
为检验跟踪滤波器的稳定性,全面考核跟踪滤波器在组合发动机不同工作状态下的跟踪精度,仿真时选用组合发动机动态数学模型替代实际的发动机,并根据传感器的测量精度,在动态模型输出参数中加入幅值不等的高斯白噪声。
进行跟踪滤波器计算前,首先确定组合发动机动态系统的过程噪声协方差矩阵Q和传感器测量噪声协方差矩阵R,仿真开始1 s后起动跟踪滤波器。设定组合发动机在0~15 s工作在混排涡扇模态,在第15 s打开模态转换阀,同时阶跃改变主燃烧室燃油流量、超级燃烧室燃油流量及各调节机构的位置和面积,使组合发动机在15~30 s工作在涡轮冲压模态。

图2 跟踪滤波器对发动机测量参数的跟踪响应曲线Fig.2 Response curve of tracking filter for engine measure parameters
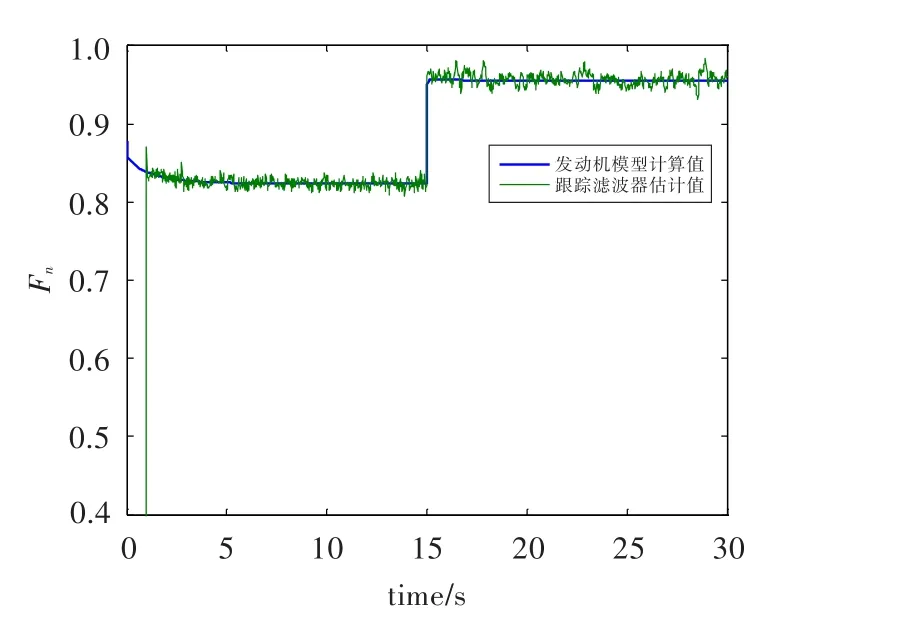
图3 计算推力与估计推力的对比曲线Fig.3 Comparison of the calculated and estimated engine thrust
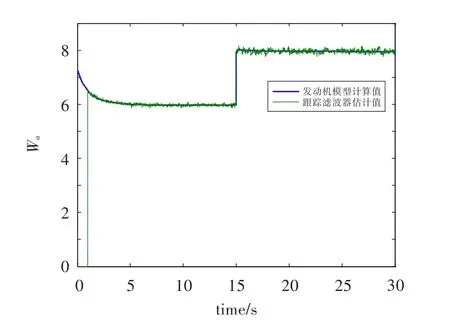
图4 计算空气流量与估计空气流量的对比曲线Fig.4 Comparison of the calculated and estimated mass flow
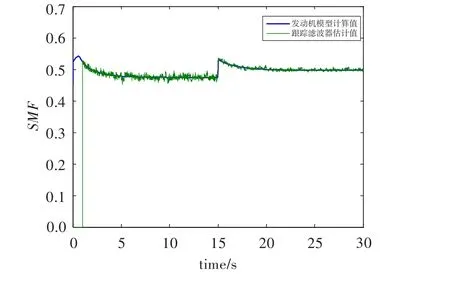
图5 计算喘振裕度与估计喘振裕度的对比曲线Fig.5 Comparison of the calculated and estimated surge margin
仿真结果如图2~图5所示。从图2中的对比曲线可看出,跟踪滤波器在组合发动机工作状态显著变化时,能克服传感器测量噪声等不利因素影响,快速、准确地调整滤波器状态,使在线实时模型相应截面的温度、压力等输出参数与实际发动机传感器的测量数据一致,跟踪相对误差均在±3%以内。从图3~图5中可看出,跟踪滤波器能准确估计出发动机推力、空气流量、喘振裕度等不可测参数,能准确反映发动机的真实特性。
5 结论
针对组合发动机不可测参数的估计问题,本文采用了一种基于EKF和在线发动机实时模型相结合的跟踪滤波器设计方案,并详细介绍了EKF滤波计算方法及跟踪滤波器的设计方法。仿真结果表明,在组合发动机工作状态显著变化时,跟踪滤波器能有效克服测量噪声等不利因素影响,实现对传感器输出的快速、准确跟踪,估计出的传感器不可测参数项能准确反映组合发动机的真实状态,可为多变量控制器提供品质较好的输出反馈参数。
[1] Demranis A,Sanso F.Nonlinear estimation problems for nonlinear models[J].Manuscript Geodaetica,1995,20:110—122.
[2] Simon D,Simon D L.Aircraft Turbofan Engine Health Es⁃timation Using Constrained Kalman Filtering[R].NASA TM-2003-212528,ASME GT2003-38584,2003.
[3] Alag G S,Gilyard G B.A Proposed Kalman Filter Algo⁃rithm for Estimation of Unmeasured Output Variables for an F100 Turbofan Engine[R].NASA TM-4234,AIAA 1990-1920,1990.
[4] 赵连春,Mattingly J D.飞机发动机控制—设计、系统分析和健康监视[M].北京:航空工业出版社,2011.
[5] 邓自立.卡尔曼滤波与维纳滤波—现代时间序列分析方法[M].哈尔滨:哈尔滨工业大学出版社,2001.
Tracking Filter Design for Turbine Based Combined Cycle Engine Based on EKF
HOU Ying-dong,DAI Dong-hong,JIANG Wei-yu
(Beijing Power Machinery Institute,Beijing 100074,China)
In order to get the optimal estimation of performance parameters for turbine based combined cy⁃cle engine(TBCC),a tracking filter design plant based on extended kalman filter(EKF)and real time on-line engine model was introduced.The tracking filter can dynamically adjust model states according to the errors between on-line engine model outputs and sensor measured values.The variance of state errors can be minimized because of the EKF adjustment.The simulation results show that filter outputs can trace sensor measured values quickly and precisely while engine operate conditions were changed greatly.Mean⁃while,engine unmeasured parameters,just like engine thrust,mass flow and surge margin,were calculated with high accuracy.
extended Kalman filter;TBCC engine;nonlinear;optimal estimation;tracking filter;real time on-line engine model
V236
A
1672-2620(2013)06-0057-04
2013-11-29;
2013-12-20
侯营东(1984-),男,山东郓城人,工程师,研究方向为发动机控制。
