基于网格变形技术的全附体潜艇操纵性计算*
2013-06-19孙铭泽王永生张志宏戴余良
孙铭泽 王永生 张志宏 戴余良
(海军工程大学船舶与动力学院 武汉 430033)
0 引 言
潜艇水动力系数的数值计算主要是基于势流理论.随着计算流体力学和计算机技术的飞速发展,目前基于雷诺时均方法(RANS)的数值模拟成为操纵性试验数值计算的热点.潜艇操纵性物理试验主要有直线拖曳试验(ORT)、回转臂试验(RAT)以及平面运动机构试验(PMM).以往操纵性的数值模拟主要集中于前2种试验.文献[1]系统阐述了基于粘性流的CFD方法在潜体操纵性预报中的重要作用,并以SUBOFF几何为研究对象,计算了在不同攻角下的流场,并将不同湍流模型下的计算结果与试验数据以及基于迟滞分离涡(DDES)模型的计算结果进行了比较;文献[2]从网格第一层节点距离、网格数量以及湍流模型等方面论述了操纵性计算的数值方法,并与试验数据进行了对比,该文献认为,第一层网格节点距离的取值应使无因次距离y+介于40~100之间,而纵向力的精确预报相对于侧向力或力矩需要较多的网格数量,同时指出了大漂角姿态下的操纵性精确预报的缺陷;文献[3]应用CFD 软件对潜艇的直线拖曳试验和回转臂试验进行了大量的数值计算,得到了在线性或弱非线性前提下的粘性类水动力系数和舵角系数;文献[4]采用6 种不同的湍流模式计算了SUBOFF 2种模型在变漂角和变攻角条件下的操纵性水动力,并与试验值进行比较,计算误差在20%以内,该文献认为κ-ω SST 模型较为适合进行潜艇操纵性数值计算.以上所述的潜艇操纵性数值计算只能获取潜艇粘性类水动力系数,而不能计算惯性类水动力系数,所需要进行的计算量较为庞大,限制了潜艇操纵性的快速预报.而PMM 数值试验却能较好地解决这个问题.
文献[5-6]系统地阐述了利用基于动网格技术的FLUENT 软件实现平面运动的方法,该方法通过编写UDF函数控制四面体网格节点位移来实现网格运动,并在运动中求解瞬态雷诺时均方程从而对操纵性进行快速预报.由于结构化网格较非结构化网格在网格正交性、计算收敛性以及对数值耗散的抑制等方面具有优势,基于结构化网格的数值计算结果将更为可信,于是利用六面体网格进行PMM 试验的数值模拟势必成为主流,然而这方面的发展较少见于报道.
本文以有精细试验数据的DARPA-2全附体SUBOFF潜艇为分析对象,以全局映射式六面体网格进行空间离散,利用基于网格变形技术的ANSYS CFX 软件,实现了潜艇小振幅PMM 试验的虚拟仿真,同时也进行了直线拖曳试验和回转臂试验的数值计算,并将计算结果与试验数据进行对比,阐述了该方法在操纵性计算领域的适用性,证明了该方法在计算水动力系数时的可靠性,提供了潜艇操纵性快速预报的一种新途径.
1 基本理论与控制方程
1.1 控制方程
目前广泛使用雷诺时均法来考察瞬时值的影响,用张量的形式表述不可压湍流作时间平均处理的控制方程为
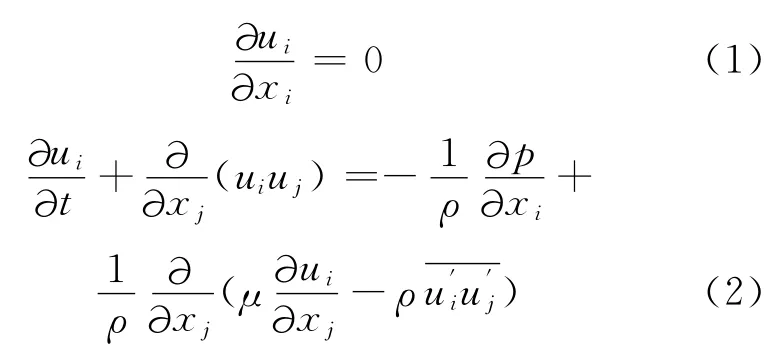
1.2 网格变形方程
CFX 软件所提供的网格变形技术[7]能够使指定的边界或子域内的节点按照CEL 语句所规定的规律进行变形,这项技术主要是在求解瞬态RANS方程之前求解位移扩散方程,该方程使边界或子域附近的节点适应性地运动

式中:δ为相对位移;(Γdisp为网格刚度系数,默认为1m2/s.
2 PMM 试验的数值实现
潜艇PMM 试验主要包括:纯升沉运动、纯俯仰运动、纯横荡运动和纯摇艏运动.利用CFX 软件实现各种运动,通过编写CEL语句控制节点位移,同时控制体进口方向模拟无限远来流,设来流速度为v=3.05m/s.
2.1 数值计算的准备
计算时为了保证网格变形的质量,将潜艇壁面附近一定范围内的流场单独设置为子域(subdomain),外部流场与子域通过设置交界面进行数据传递,整个流场边界范围为:来流方向取1 L,下游方向取2 L,径向取1 L,L 为潜艇全长,见图1.
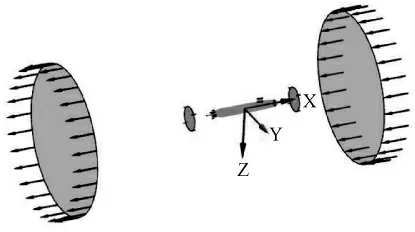
图1 计算域的设置
本文的计算案例中计算域均采用全局映射式六面体网格进行离散,这部分工作在专业网格划分软件ICEM CFD 中完成,见图2.为了适应所采用的SST 湍流模型的需要,需控制网格壁面第一层距离.同时,为了适应潜艇不同姿态下的分离流动,在翼面及主艇体背流区域的网格进行局部加密.另一方面,将潜艇艇体附近的网格与远离艇体部分的流场分离开来,并使该子域内的所有网格节点按指定规律同步运动以保证网格质量,见图3.网格节点总数约为156万.

图2 艇体表面网格
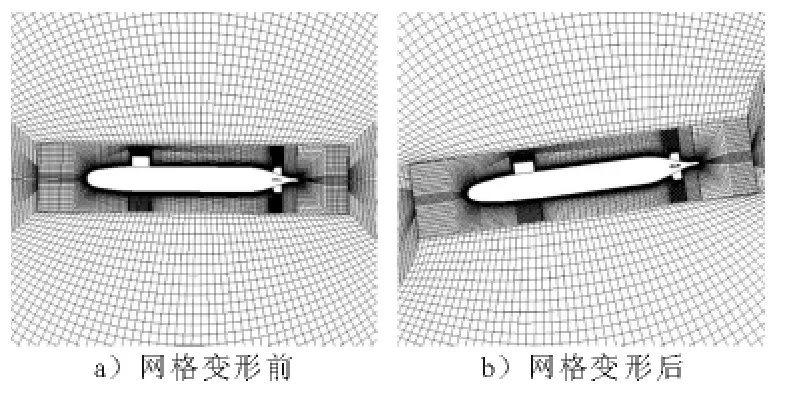
图3 纵中剖面网格变形前后比较(纯俯仰运动)
2.2 操纵性计算
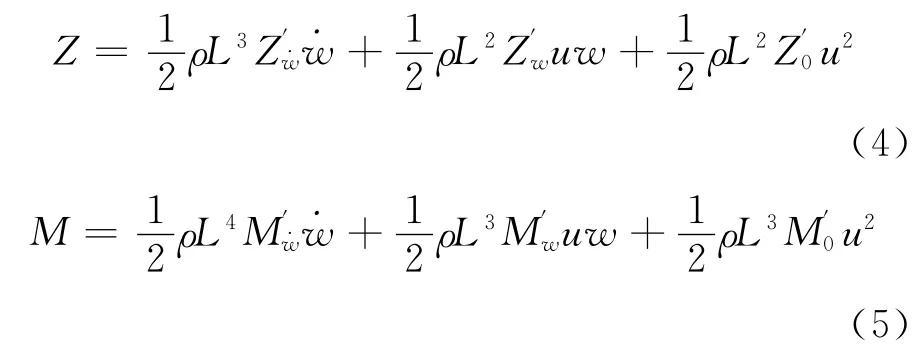
2.2.1 速度与加速度系数的求取 基于线性理论的小振幅平面运动机构主要是为了测定线性水动力系数,而纯升沉运动和纯横荡运动是为了求取速度与加速度系数,以纯升沉运动为例,由水动力系数的意义可得线性方程
设定振幅a=300mm,艇长L=4.356m,模型的运动规律为


式中:ζ为潜艇的垂向位移;ω 为周期运动圆频率,ω=2πf;f 为运动频率,为了使迭代时间步长取整数,将频率设置为:0.2,0.25,0.3125,0.4,0.5,0.625Hz;w 和˙w 分别为垂向运动速度和加速度.

计算时使子域内的网格节点按正弦规律作小幅振动,将一个运动周期分为40个时间步,通常计算6个周期便可得到稳定的垂向力和俯仰力矩关于时间的变化曲线,见图4.
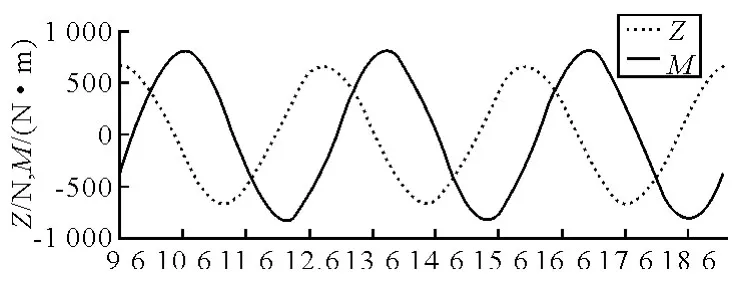
图4 纯升沉运动垂向力Z 和俯仰力矩M 的迭代曲线(f=0.3125Hz)
文献[8]对物理试验的数据处理方法做了阐述,依照分量分离的方法,将水动力的同相分量与正交分量分开.可以采用Fourier级数展开到1阶的方法进行分量分离,计算曲线见图5,由该曲线拟合出的速度系数和加速度系数为

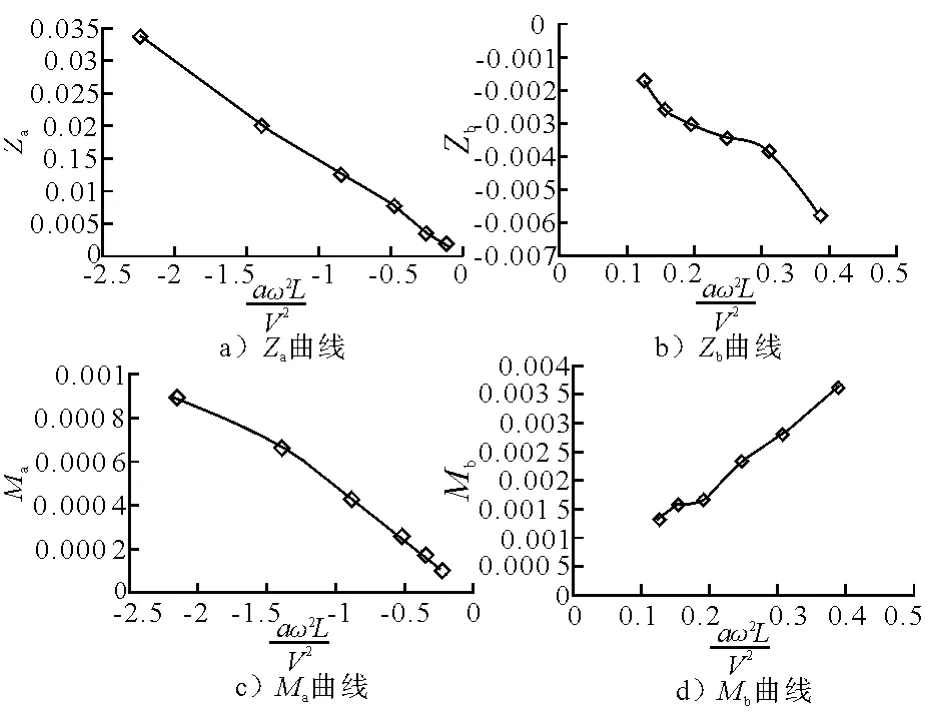
图5 纯升沉运动水动力系数求取曲线
纯横荡运动与纯升沉运动非常相似,将潜艇模型置于横卧状态进行运动即可.在此直接给出水动力系数计算结果,见图6,据此拟合出的关于侧向速度v的速度系数和加速度系数为

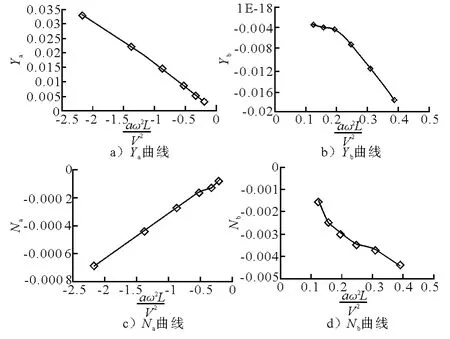
图6 纯横荡运动水动力系数求取曲线
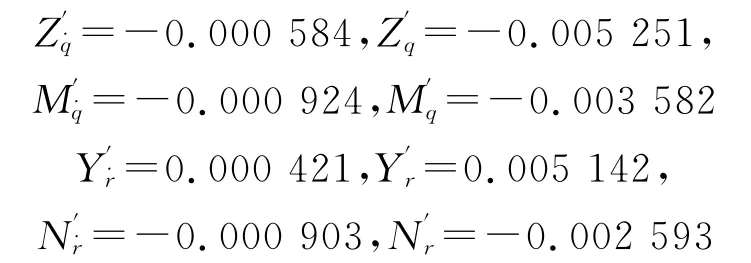
2.2.2 角速度和角加速度系数的求取 纯俯仰运动和纯摇艏运动则是为了求取角速度和角加速度系数.同上述分析,在小振幅运动的线性前提下可写出纯俯仰运动的水动力方程

设定纯俯仰运动的振幅θ0=π/30rad,则纯俯仰运动的运动方程为

式中:θ为潜艇模型的纵倾角.
数值试验中,通过编写CEL 语句,一方面使子域内的节点按正弦规律上下振动,另一方面则绕重心在垂直面内按正弦规律转动,那么两种运动的合成就是纯俯仰运动.计算时与纯升沉运动一样,将一个周期分为40个时间步,计算6~8个周期就可以得到稳定的垂向力和俯仰力矩关于时间的变化曲线,对该曲线按Fourier级数展开至1阶,取不同频率下的1阶系数拟合出相应的角速度和角加速度系数,图表数据略,直接给出计算得到的水动力系数如下
2.3 计算结果校验与分析
美国泰勒研究中心做了SUBOFF 全附体潜艇(AFF-8几何)的操纵性试验,并公布了部分水动力系数试验数据[9].将本文计算得到的水动力系数与试验数据进行对比[10],见表1~2.
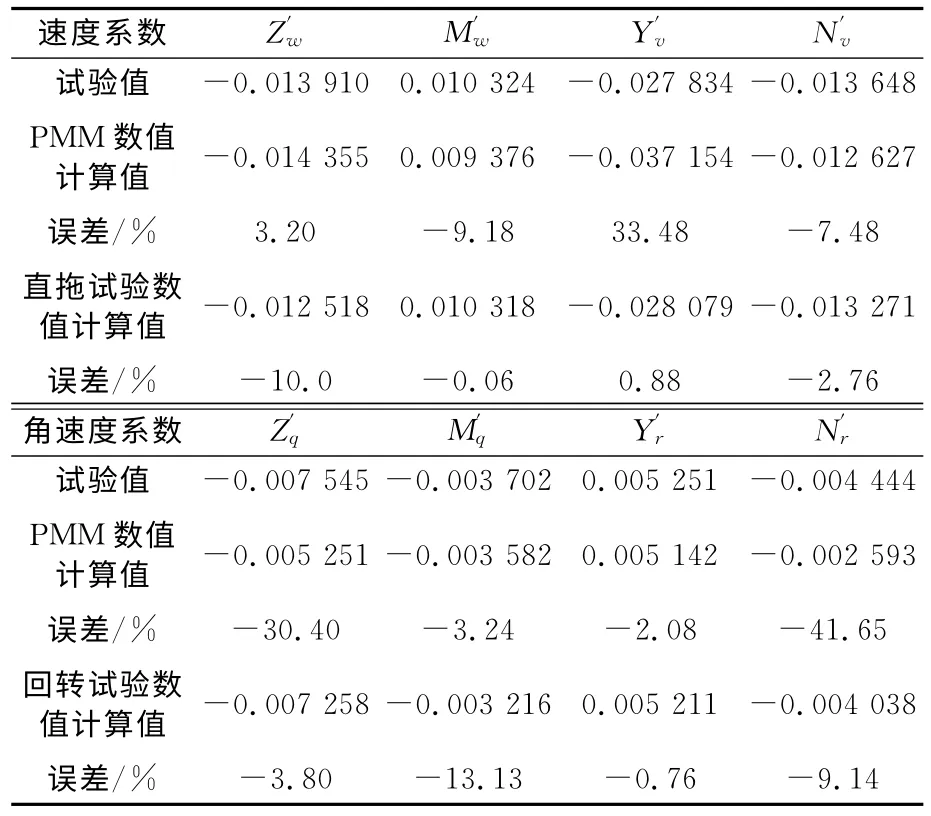
表1 粘性类水动力系数对比
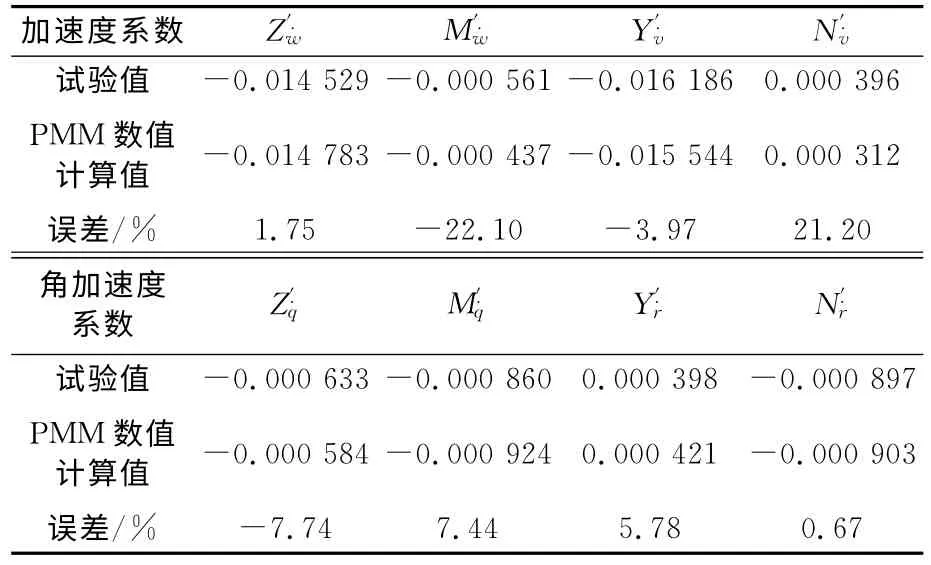
表2 惯性类水动力系数对比
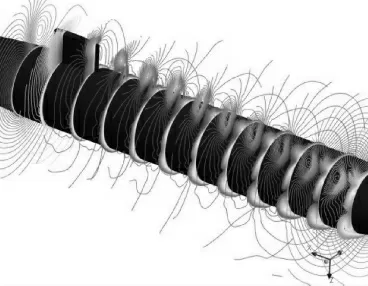
图7 RANS模拟潜艇涡量场沿流动方向的演变(纯横荡运动,f=0.2Hz)
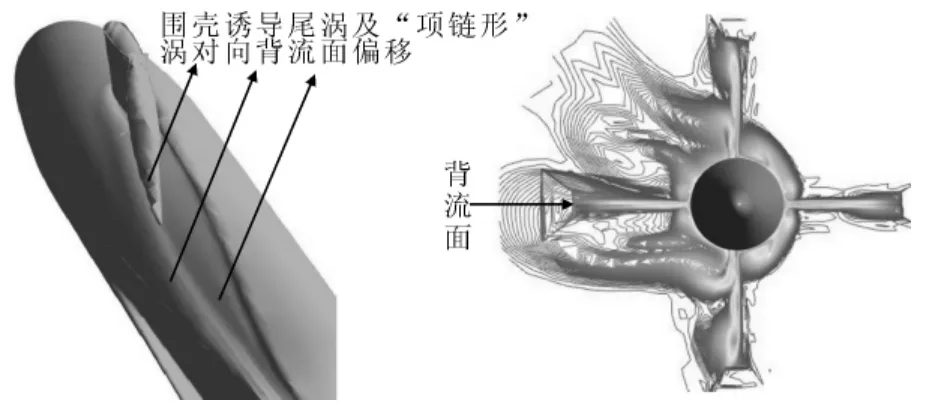
图8 纯横荡运动中潜艇处于平衡位置时涡量向背流面的偏移
文献[7]指出,由纯升沉和纯横荡试验所测出的水动力系数中,速度系数的值较小,所得之测量值往往离散度较大,所以速度系数一般仍由直拖试验来确定.从表1中也可以看出,由PMM 数值试验求得的速度系数与直拖试验或回转试验所得结果相比误差稍大,但精度仍稍高于文献[6]由PMM 数值计算得到的粘性类系数的计算精度.另一方面,PMM 试验所采用的数学模型是基于小振幅线性假设的,并没有考虑非线性项和耦合项的影响,这也是产生误差的重要原因之一.
从计算效率的角度来看,要想精确获得全部速度系数,直拖数值试验至少需要12个不同的攻角姿态以及同等数量的不同的漂角姿态,计算耗时较长,而PMM 数值试验只需要在5~6个频率下进行纯升沉和纯横荡试验即可,角速度系数的计算耗时与此类似.另一方面,直拖数值试验和回转数值试验不能在稳态条件下获得惯性类水动力系数,这也限制了此二者的应用范围.PMM 数值试验的最大的优势在于可在一组试验中同时求出惯性类系数和粘性类系数,基于大振幅非线性理论的PMM 数值试验也可获得非线性系数和诸多耦合系数,从而减少了数值试验次数,提高了计算效率,这对潜艇操纵性的快速预报具有重要意义.
3 结 论
1)潜艇PMM 试验的数值计算结果与DTRC所公布的试验数据取得较好一致,整体误差能够控制在8%以内,只有极少数水动力系数与试验值偏差超过了20%,从数值模拟的整体上看计算结果是真实可信的.
2)潜艇PMM 数值模拟可以较快地获取相关的水动力系数,且在一组计算内既能够获得惯性类水动力系数也能够获得粘性类水动力系数,这是直拖数值试验或回转试验数值计算所不具有的优势.
3)潜艇PMM 试验的数值模拟所获得的惯性类水动力系数具有较高的精度,而粘性类水动力系数计算精度不如直拖试验或回转试验数值计算的精度高,若只要求获得粘性类系数,本研究建议仍采用常规试验方法.
[1]VAZ G,TOXOPEUS S,HOLMES S.Calculation of manoeuvring forces on submarines using two viscous-flow solvers[C]∥Proceedings of the ASME 201029thInternational Conference on Ocean,Offshore and Arctic Engineering,OMAE,2010.
[2]ZENG Guanghui,ZHU Jun.Study on key techniques of submarine maneuvering hydrodynamics prediction using numerical method[C]∥2010Second In-ternational Conference on Computer Modeling and Simulation,ICCMS,Taiyuan,China,Oct.21,2010.
[3]詹成胜,刘祖源,程细得.潜艇水动力系数数值计算[J].船海工程,2008,37(3):1-4.
[4]柏铁朝,梁中刚,周轶美.潜艇操纵性水动力数值计算中湍流模式的比较与应用[J].中国舰船研究,2010,5(2):22-28.
[5]ZHANG He,YU Yuru,CAI Haopeng.Using CFD software to calculate hydrodynamic coefficients[J].Marine.Sci,2010(9):149-155.
[6]张晓频,庞永杰.多功能潜水器操纵性能与运动仿真研究[D].哈尔滨:哈尔滨工程大学,2008.
[7]王化明,邹早建.双桨多舵船舶操纵性预报研究[J].武汉理工大学学报:交通科学与工程版,2006,30(1):124-127.
[8]陈厚泰.潜艇操纵性[M].北京:国防工业出版社,1981.
[9]RODDY R F.Investigation of the stability and control characteristics of several configurations of the darpa suboff model(DTRC model 5470)from captive-model experiments[R].David Taylor Research Center,Ship Hydrodynamics Department,1990.
[10]ANSYS Inc.Turbulence and near-wall modeling[M].Canonsburg:ANSTS CFX-Solver Modeling Guide,2009.
