模糊控制在船舶航速仿真系统中的应用
2013-06-12刘西全
刘西全
(青岛港湾职业技术学院,山东 青岛266404)
船舶航速的变化,归根结底是船舶主机的转速变化,船往往是浮在水面或潜在水中并活动于不同地区,在任何时刻,它都受到风浪、水浪等环境的直接影响,要求用人工来保持航速不变,这是不容易做到并做不好的。为此,建立船舶推进系统的仿真模型,利用Fuzzy logic工具箱对PID参数进行优化,采用Matlab软件对某护卫舰航速控制系统进行仿真分析。
1 模糊自适应PID控制系统
1.1 模糊控制的基本原理
模糊控制的基本原理见图1。
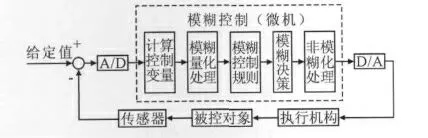
图1 模糊控制原理
其核心部分为模糊控制器,如图中点划线框中所示。模糊控制器的控制规律由计算机的程序实现。实现模糊控制算法的过程描述如下。
计算机经中断采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E,一般选误差信号E作为模糊控制器的一个输入量。把误差信号E的精确量进行模糊化变成模糊量。误差E的模糊量可用相应的模糊语言表示,得到误差E的模糊语言集合的一个子集e(e是一个模糊矢量),再由e和模糊控制规则R(模糊算子)根据推理的合成规则进行模糊决策,得到模糊控制量u。

1.2 模糊PID控制
1.2.1 模糊自适应整定PID控制原理
自适应模糊PID控制器以误差e和误差变化ec作为输入量,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,从而使被控对象有良好的动、静态性能。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对kp、ki、kd三个参数分别整定的模糊控制表。
kp、ki、kd的模糊控制规则表建立后,根据如下方法进行kp、ki、kd的自适应校正。

模糊自整定PID参数控制系统结构主要由参数可调整PID和模糊控制系统两部分组成,结构见图2。参数可调整PID完成对系统的控制,模糊控制系统实现对PID三个参数进行自动校正。
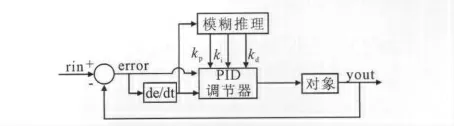
图2 自适应模糊PID控制系统结构
1.2.2 模糊控制器的设计
采用二维模糊控制器[1],输入为柴油机转速偏差E及其导数EC,其模糊词集和论域皆为{NB,NM,NS,ZO,PS,PM,PB},(-100,100)。输出为Kp、Ki、Kd,其模糊词集均为{NB,NM,NS,ZO,PS,PM,PB},根据Ziegler-Nichols算法,初步算得本仿真机型的控制器参数为Kp=9.807,Ki=21.218 1,Kd=1.087 6。故其论域分别设为(-12,12)、(-25,25)和(-3,3)。模糊逻辑控制器见图3。

图3 模糊逻辑控制器
2 柴油机数学模型建立
柴油机转速控制系统见图4。由于全工况的柴油机建模比较困难,本文对柴油机模型作了简化,考虑延迟并经线性化处理后,可作为一阶惯性延迟环节。柴油机电子调速系统中的执行器采用环形电枢直流伺服电机,可认为是一个标准的二阶环节。加上PID控制器,则可组成一完整的柴油机调速模型,可用于对柴油机动态过程的仿真,并通过仿真来研究该模型的合理性和准确性。
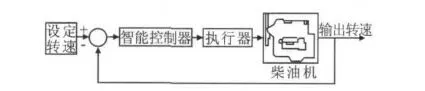
图4 柴油机转速控制系统结构
2.1 柴油机模型
非增压柴油机的运动可用以下方程描述[2]。

式中:y(t)——柴油机转速,是时间t的函数(无因次量);
η(t)——控制供油量的齿条位置,是时间t的函数(无因次量);
λ(t)——扰动,是时间t的函数(无因次量);
Ta——柴油机时间常数,s;
τ——齿条位移的纯滞后时间,s。
将上式拉氏变换可得非增压柴油机的简化传递函数

式中:Y(s)——对y(t)进行拉氏变换的结果;
H(s)——η(t)的拉氏变换;
Λ(s)——λ(t)的拉氏变换。
为简单起见,设扰动λ(t)=0,于是得到简化的柴油机模型,即可用一阶惯性延迟环节来近似代替原柴油机模型。简化后的柴油机传递函数为

由于

于是

查取文献[3]并计算得Ta=1.28 s,τ=0.19 s,其传递函数为

2.2 执行器模型
执行机构为可逆的直流伺服电机,一般采用环形电枢直流伺服电机,可认为是一个标准的二阶环节,见图5。

图5 执行环节
整个执行环节的传递函数为

式中:Hg(s)——给定齿条位移ηg(t)的拉氏变换;
H(s)——齿条位移η(t)的拉氏变换;
Wnd——执行机构的无阻尼自然振荡角频率,rad/s;
ξd——执行机构的阻尼因子。
在工程设计中常取ξd=0.4~0.8。在这个取值范围内可使调整时间ts达到较小,而最大超调量和上升时间又不太大。由文献[4]可知,当ξd=0.707时称为最佳阻尼比。为使执行环节具有较好的动态响应特性,取ξ=0.707,W =35.4,其传递函数为

3 螺旋桨子模型(含船体)建立
主机直接传动或通过传动装置带动螺旋桨,后者发生推力。推力通过推力轴承作用在船体上推动船舶运动。所以船桨系统中包括推进装置的旋转部分和船的直线运动两个惯性体系(分别称为转动和平动系统)[5]。
螺旋桨在敞水中的推力为

螺旋桨上的水阻力矩为

螺旋桨的桨叶,除本身以np转动外,还要跟船一起作轴向运动。螺旋桨相对于水的轴向前进速度称为桨的进速vp,进速系数为
通常用推力系数kt和转矩系数kq计算敞水推力和螺旋桨转矩。但由于这两个系数都是进速系数J的函数,又都只有实验数据而无计算式。由于船舶制动是利用螺旋桨反转实现的,所以正反转对应于不同的kt、kq曲线。此曲线自变量J的定义域为-∞到+∞,曲线两端的kt、kq值(绝对值)也很大,这些都将给建模带来麻烦。为此,引入一个自变量Φ,且Φ在定义域内的取值是有限的。这样,船舶的敞水推力和螺旋桨转矩方程可改写为


ρ——水的密度;
Ct=ktcos2Φ,Cq=kqcos2Φ。
以上算出的TP是螺旋桨的敞水推力。螺旋桨工作于船体后面,由于船体的影响,实际使船加速的推力Te比TP小。可写成Te=TP(1-t),t为推力减额系数。
在作船舶设计时都要用到此系数,但通常都作为常数。
图6是螺旋桨(含船体)的子模型图。
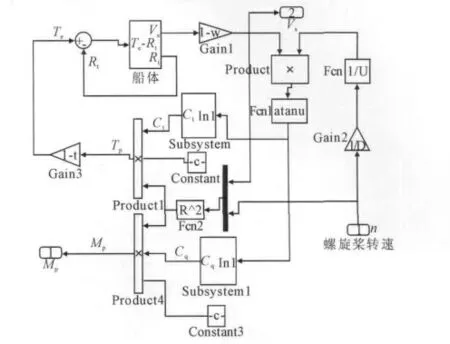
图6 螺旋桨子模型(含船体)
4 船舶航速控制系统模型建立
Matlab Simulink环境下[6],某船推进装置模型的总仿真框图见图7。
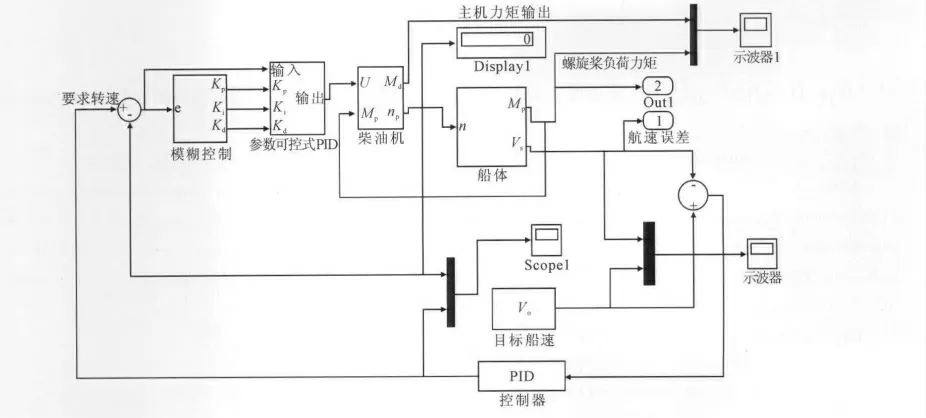
图7 船舶推进系统模型
仿真船舶为排水量1 500 t,船长92.04 m,船宽10.83 m,吃水3.18 m。方形系数Cb=0.46,棱形系数Cp=0.62,中横剖面系数Cm=0.75,盘面比Ae/Ao=0.70,叶数z=4,桨数m=1。
船用主机为12E390V。缸径390 mm;行程为410 mm;标定功率5 292 kW、转速为480 r/min。应用上述仿真模型,对航速24~25 kn的情况进行仿真。为模拟实际情况,仿真中分别对无干扰、附加5%、10%及20%干扰情况作仿真。仿真结果分别见图8、图9。
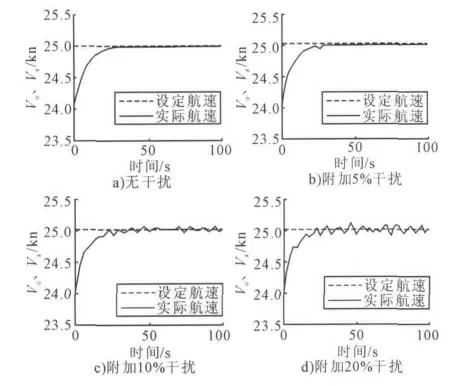
图8 船舶航速仿真
5 结论
在船舶航速控制系统中,采用模糊控制优化PID参数,使得柴油机发出的转矩与船舶螺旋桨吸收的转矩能够较好地吻合,同时船舶航速能够在较小的超调范围内相对较快地达到设定的航速值。充分表明此种算法在实际运用中是可行性的。实际中若能根据经验对控制器参数反复进行优化﹑试验,相信控制效果会得到明显改善。
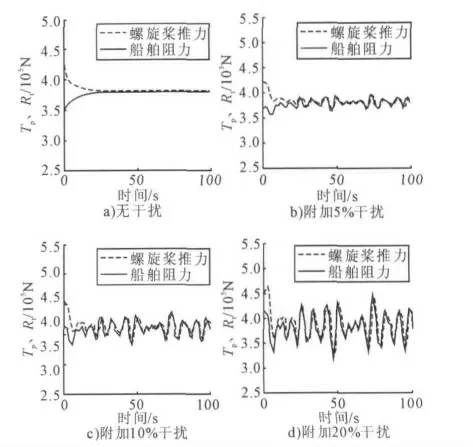
图9 螺旋桨推力和船舶阻力仿真
[1]候北平,卢 佩.Matlab下模糊控制器的设计与应用[J].测控技术,2001,20(10):40-42.
[2]赵国光,黄刘琦.船舶动力装置自动化[M].北京:国防工业出版社,1986.
[3]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[4]刘金琨.先进PID控制及其Matlab仿真[M].北京:电子工业出版社,2003.
[5]Matlab语言与自动控制系统设计[M].北京:机械工业出版社,1997.
[6]邵家骧.发动机转速自动控制[M].北京:人民交通出版社,1990.