基于上下文定界的Fork/Join并行性的并发程序可达性分析*
2013-06-07钱俊彦贾书贵蔡国永赵岭忠
钱俊彦,贾书贵,蔡国永,赵岭忠
(1.桂林电子科技大学计算机科学与工程学院,广西 桂林 541004);2.并行与分布处理国家重点实验室,湖南 长沙 410073)
1 引言
无论从理论,还是实践角度来看,并发程序验证都是极具挑战性的问题。随着多核技术日益发展,通过引入Fork/Join并行性,并发程序将任务分解为更细粒度的子任务并行执行,从而充分利用多核处理器提供的计算性能[1]。但是,多个线程之间的交错执行可能会产生隐匿的错误和漏洞,故保证并发程序的正确性具有十分重要的意义[2]。近些年提出的上下文定界方法是一种适合并发程序的分析技术,其思想是仅考虑有限次上下文切换(控制权从一个线程切换到另一个线程)之内程序执行的计算。由于在有限次上下文切换之内可发现许多并发相关的错误,上下文定界思想有助于程序分析。在程序中存在递归和过程调用的情况下,虽然被搜索的状态空间是无界的,但上下文定界可达问题是可判定的[3]。
针对Fork/Join并行性的并发程序进行可达性分析,主要基于以下考虑:Fork/Join 并行性涉及到动态线程创建,而动态线程创建对于构建操作系统的组件是非常重要的[4]。例如:(1)文件系统、设备驱动、无封装数据结构等软件模块的无界并发执行;(2)异步行为的生成:例如创建一个线程、回调函数等;(3)实现应用软件的并行化执行,充分利用多核体系结构的强大性能。
2 下推系统


3 并发下推系统

3.1 定界可达问题

3.2 k-定界可达算法
Qadeer提出的上下文定界模型检验算法假设全局状态集合G 是有限的。算法执行过程中迭代地增加执行上下文的数目,在一个执行上下文内,全局状态对于当前线程是局部的,只有该线程可以访问全局状态。上下文切换时同步该全局状态,使得其他线程共享全局状态。对于给定正整数k,该算法可以搜索并发下推系统在k 次上下文切换执行所有可达的格局集合。k-定界可达算法如下所示:
算法1k-定界可达算法


对于并发下推系统P=(G,Γ,Δ0,…,ΔN,gin,win)和正整数k,该算法是可终止的,并且判定该问题的复杂度为O(k3(N|G|)k|P|5)。
4 Fork/Join并行模式的并发程序分析
随着多核处理器逐渐成为主流,并发程序通过引入Fork/Join并行任务调度模式,将一个规模较大的任务分解为更细粒度的子任务(线程)并行执行,从而充分利用多核处理器的计算能力。由于任务可以用线程的执行模拟,因此下文中用线程的概念来表示任务。
4.1 Fork/Join并行模式
Fork/Join并行模式是获取更高并行性能的最简单和高效的设计技术。Fork操作创建一个新的并行执行子线程,Join操作使得当前线程等待执行,直到新创建的子线程执行结束。图1给出了一个Fork/Join模式的示意图,位于图上部的线程依赖于位于其下的子线程的执行,只有当所有的子线程都执行结束之后,调用者才能获得线程0的返回结果。
允许Fork/Join并行模式的并发程序的线程标识符的使用是有限制的,因此对存储线程标识符的变量的使用也是有限制的。Fork操作创建一个线程标识符,存储在一个变量中。随后,该线程标识符被拷贝存储到其父线程的线程标识符变量中。最后,Join操作监视该变量中包含的线程标识符,该线程执行结束后返回父线程继续执行。
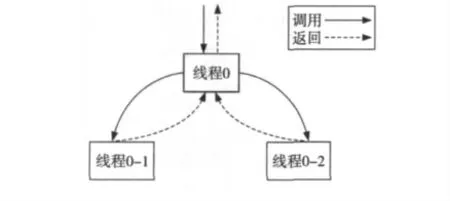
Figure 1 Fork/Join model图1 Fork/Join 模式示意图
4.2 动态并发下推系统
本节定义Fork/Join并行性的并发程序的抽象模型——动态并发下推系统。在并发程序中,各个线程模型可用新线程的下推系统来创建。线程包含局部变量并可访问全局(共享)变量。使用栈字母表Γ 模拟局部变量值,G 中的状态模拟全局变量的值。为了支持动态的Fork/Join并行模式,需使用存储线程标识符的程序变量对线程标识符进行存储。线程标识符取值于集合Tid={0,1,2,…}。新创建的线程标识符存储在其父线程的标识符变量中,父线程可对该变量中包含的线程标识符对应的子线程执行Join操作。
4.2.1 语法
一个动态并发下推系统可表示为一个七元组(G,Γ,Δ,ΔF,ΔJ,gin,γin)。其中:
(1)G 是所有全局变量赋值的(无限)集合,由包含布尔值的全局变量集合GBV 和包含线程标识符的全局变量集合GTV 组成。
(2)Γ 是所有局部变量赋值的(无限)集合,由包含布尔值的局部变量集合LBV 和包含线程标识符的局部变量集合LTV 组成。
(3)Δ⊆(G×Γ)×(G×Γ*)是描述任意线程单个步骤的迁移集合。
(4)ΔF⊆Tid×(G×Γ)×(G×Γ*)是Fork迁移关系。如果(t,〈g,γ〉,〈g′,w〉)∈ΔF,那么在全局状态g 下,栈顶符号为γ的线程创建一个标识符为t的线程,并修改全局状态为g′,栈顶符号γ 替换为w。
(5)ΔJ⊆LTV×(G×Γ)×(G×Γ*)是Join迁移关系。如果(x,〈g,γ〉,〈g′,w〉)∈ΔJ,那么在全局状态g 下,栈顶符号为γ 的线程阻塞,直至标识符为γ(x)的线程执行完毕。一旦等待线程执行完毕,修改全局状态为g′,并将栈顶符号γ 替换为w。
(6)gin是初始全局状态,对于所有的x∈GTV,gin(x)=0成立。
(7)γin是初始局部状态(栈内容),对于所有的x∈LTV,γin(x)=0成立。
4.2.2 语义
定义1ss∈Stacks=Tid →(Γ∪{$})*是线程标识符对应的栈内容,C=G×Tid×Stacks是动态并发下推系统的格局集合,⊆C×C 是动态并发下推系统格局上的迁移关系。
每个动态并发下推系统使用一个特殊符号$∉Γ 来标记每个线程的栈底。动态并发下推系统的一个格局是一个元组〈g,n,ss〉,其中g 是全局状态,n是最后被创建的线程的标识符,ss(t)是线程t∈Tid 的栈。动态并发下推系统的执行从格局〈gin,0,ss0〉开始,其中对于所有的t∈Tid,ss0(t)=γin$。
以下规则定义了从格局〈gin,0,ss0〉开始线程t可以执行的迁移:
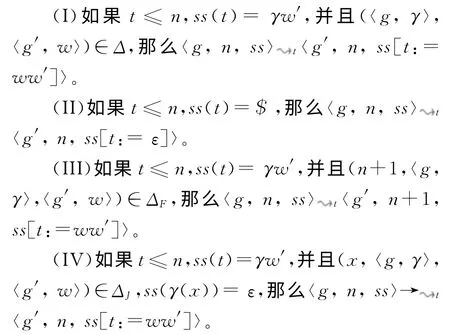
所有的规则都包含条件t≤n,表明线程t必须已经被创建。因此,只有线程0可以从初始格局〈gin,0,ss0〉开始执行。规则(I)允许线程t执行迁移关系Δ 中的一个迁移。规则(II)表示线程t终止执行,即当线程t的栈顶符号是$时,线程t从栈中弹出符号$,不改变全局状态,从而线程t终止执行。规则(III)模拟线程的Fork操作,即线程t根据一个Fork迁移关系创建一个标识符为n+1的新线程。规则(IV)模拟线程的Join操作,线程t等待标识符为γ(x)的线程执行结束之后,线程t继续执行下一个迁移,其中γ 是线程t 的栈顶符号。使用一个空栈来表示线程终止。
4.3 简化为并发下推系统
本节说明如何将一个动态并发下推系统的k-定界可达问题转换为包含k+1个线程的并发下推系统的k-定界可达问题。给定动态并发系统P 和正整数k,可以从中提取一个包含k+1个线程的并发下推系统Pk,这些线程的标识符取值为{0,1,…,k},并且足以验证Pk的k-定界执行。3.2节给出的算法可解决并发下推系统k-定界可达问题。
该简化方法的主要思想是:在一个k-定界执行中,至多k个不同的线程会执行一次迁移。可以使用Pk中标识符为{0,1,…,k-1}的k 个线程的迁移来模拟这k 个线程的迁移。Pk中的最后一个标识符为k 的线程从不执行迁移,该线程用于模拟P 中其它线程的存在。令Tidk={0,1,…,k}为整数k限定的线程标识符集合。AbsGk和AbsΓk分别是有限全局状态集合和有限局部状态集合,其中包含线程标识符的变量仅从Tidk中取值。
给定动态并发下推系统P=(G,Γ,Δ,ΔF,ΔJ,gin,γin)和正整数k,可以构造出并发下推系统Pk=(AbsGk× Tidk×T (Tidk),AbsΓk∪{$},Δ0,…,Δk,(gin,0,Ø),γin$)。该并发下推系统Pk包含k+1个线程。Pk的全局状态是一个三元组(g,n,α),其中g 是全局变量的赋值,n 是允许执行迁移的线程对应的最大线程标识符,α 是终止线程对应的线程标识符集合。初始全局状态是(gin,0,Ø),表明最初只有线程0可以执行一个迁移并且其它线程没有执行。
以下规则定义了线程t的迁移关系Δt上的迁移:
(I′)如果t≤n,(〈g,γ〉,〈g′,w〉)∈Δ,添加迁移(〈(g,n,α),γ〉,〈(g′,n,α),w〉)到Δt中。
(II′)如果t≤n,添加迁移(〈(g,n,α),$〉,〈(g,n,α∪{t}),ε〉)到Δt中。
(III′a)如果t≤n,n+1<k,(n+1,〈g,γ〉,〈g′,w〉)∈ΔF,添加迁移(〈(g,n,α),γ〉,〈(g′,n+1,α),w〉)到Δt中。
(III′b)如果t≤n,(k,〈g,γ〉,〈g′,w〉)∈ΔF,添加迁移(〈(g,n,α),γ〉,〈(g′,n,α),w〉)到Δt中。
(IV′)如果t≤n,x∈LTV,(x,〈g,γ〉,〈g′,w〉)∈ΔJ,γ(x)∈α,添加迁移(〈(g,n,α),γ〉,〈(g′,n,α),w〉)到Δt中。
所有的规则都包含条件t≤n,表明从动态并发下推系统中选择的线程必须已经被创建。如果t>n,线程t在格局〈(g,n,α),γ〉下没有可以执行的迁移。规则(I′)将Δ 中的迁移添加到Δt中。规则(II′)将栈为空的线程t添加到终止线程集合。规则(III′a)和规则(III′b)处理P 线程中的创建,是该转换方法中最重要的部分。规则(III′a)对应于新创建线程参与k-定界执行的情况。该规则将计数器加1,允许线程n+1开始模拟新创建的线程。规则(III′b)对应于新创建线程不参与k-定界执行的情况。该规则保持计数器n 不变,从而保存Pk中现有的线程标识符。这两个规则将ΔF中创建线程的迁移关系添加到线程t 的迁移集合Δt中。规则(IV′)处理Join运算符,将所有先前终止线程的标识符都存储在α中。同时,该规则将挂起线程的迁移ΔJ添加到Δt中。
由动态并发下推系统P 构造并发下推系统Pk时,从初始全局状态(gin,0,Ø)开始,根据以上规则构造线程t(0≤t≤n<k-1)可以执行的迁移关系集合。构造线程t的迁移关系集合Δt时,线程t的所有可执行迁移(包含Fork和Join迁移关系)均从动态并发下推系统P 的迁移关系集合中提取。当线程标识符t=k时,构造过程终止,从而构造出模拟P 的k-定界执行的并发下推系统Pk。
5 结束语
本文给出了Fork/Join并行模式的并发程序的抽象模型——动态并发下推系统的定界可达性分析。通过将动态并发下推系统P 的k-定界可达问题简化为模拟其k-定界执行的并发下推系统Pk,从动态并发下推系统P 中提取的并发下推系统的k-定界可达性问题可使用现有的k-定界可达算法解决。能否直接对允许动态线程创建的并发程序进行可达性分析,及给出其求解算法,将是未来值得深入研究的问题。
[1]Lea D.A Java fork/join framework[C]∥Proc of 2000ACM Java Grande Conference,2000:36-43.
[2]Queille J,Sifakis J.Specification and verification of concurrent systems in CESAR[C]∥Proc of the 5th International Symposium on Programming,1981:337-351.
[3]Qadeer S.The case for context-bounded verification of concurrent programs[C]∥Proc of the 15th International Workshop on Model Checking Software,2008:3-6.
[4]Atig M F,Bouajjani A,Qadeer S.Context-bounded analysis for concurrent programs with dynamic creation of threads[C]∥Proc of the 15th International Conference on Tools and Al-gorithms for the Construction and Analysis of Systems,2009:107-123.
[5]Clarke E M,Grumberg O,Peled D A.Model checking[M].Cambridge:MIT Press,2000.
[6]Autebert J M,Berstel J,Boasson L.Context-free languages and pushdown automata[M]∥Handbook of Formal Languages,New York:Springer-Verlag,1997:111-174.
[7]Schwoon S.Model-checking pushdown systems[D].Munchen:Lehrstuhl fur Informatic VII der Technischen University,2000.
