基于三帧差分及Canny算子的运动目标提取
2013-05-28庞首颜张元胜
庞首颜,张元胜
(重庆交通大学信息科学与工程学院,重庆, 400074)
0 引言
随着社会的发展,人们对安全的要求逐渐提高。智能监控已经逐渐从军事侦查、气象监控、科学研究等专业领域走进了人们的日常生活,逐渐在银行、高速公路、智能小区等广泛使用起来。运动目标检测一直都是视频流分析的重点和难点,其检测的准确精度直接决定了后续的目标跟踪和识别等研究,是视频图像跟踪识别系统中的重要环节。目前常用的运动目标检测方法有背景差分法[1]、帧间差分法[2]和光流法[3]。
帧间差分法是在连续的图像序列中2个或3个相邻帧间,采用逐像素的差分并阈值化来提取出图像中的运动区域,它能较快地检测出视频图像中发生变化的部分。由于连续两帧图像之间的时间间隔较短,差分图像受光线、气候等环境因素变化的影响较较小,因此具有很强的自适应性。但当连续两帧图像灰度和纹理比较接近时将无法得到完整的目标,形成较明显的目标“空洞”,从而不利于目标的后期进一步分析与识别。
此处以单目固定机位摄像机输出的视频图像序列为研究对象,针对对称差分提出了一种改进算法。首先通过三帧差分法快速得到运动目标,这时候的运动目标一般都伴随着“空洞”和“重影”[4],所以先对其进行二值填充,得到较完整的运动区域二值填充图。为了进一步精确检测运动目标,结合Canny算子对中间帧进行物体的边缘处理[5],得到其二值边缘模板,然后与该运动区域的二值填充图相“与”,从而顺利分割出运动目标。
1 运动目标检测及基本数学形态运算
1.1 帧间差法运动目标检测
在连续的视频流中采集某一时间段里的视频序列图像,设f(x,y,t)表示t时刻当前帧,f(x,y,t-1),表示t时刻的前一帧,则帧间差分法为:
(1)先对连续2帧差分:

(2)对得到的差分结果进行阈值化得到二值结果:

帧间差分法能有效的抑制在背景差分法中属于背景的噪音,运动前景轮廓的提取也比较完整。在实验中可以发现,帧间差分法对光线等场景变换不太敏感,能够适应动态的环境,因此表现出较好的稳定性。但帧间差分法检测出来的物体是前后两帧相对变化的部分,出现“双影”的概率较大。另外,由于检测出来的物体是前后两帧相对变化的部分,无法检测重叠部分,导致检测到的目标发生“空洞”[6]。为了改进差分运算效果,提出了基于相邻三帧的差分法。
1.2 三帧差分运动目标检测
在视频序列中,设 f(x,y,t)表示 t时刻当前帧,其前后相邻的两帧分别用 f(x,y,t-1)和 f(x,y,t+1)表示,则三帧差分法为:
(2)利用公式(1)对差分结果阈值化得到二值结果。
1.3 Canny算子
常用的边缘检测算子[7]有Canny算子、Roberts算子、Sobel算子、Kirsch算子、Laplacian算子等。其中Roberts算子提取的边缘比较粗,边缘定位不是很准确,Soble算子对灰度简便和噪声较多的图像处理效果比较好,常用于边缘定位;Kirsch算子对灰度渐变和噪声较多的图像处理效果较好;LapLacian算子对图像中的阶跃边缘点定位准确,但对噪声非常敏感,容易造成一些不连续的检测边缘。它们都是局域窗口梯度算子,对噪声敏感,所以在处理实际图像时效果并不是十分明显。而Canny算子不容易受噪声干扰,能够检测出真正的弱边缘,不容易别噪声“填充”,更容易检测出真正的弱边缘,所以此处的边缘检测采取Canny算子。
2 基于三帧差分及Canny算子相结合的运动目标提取
对比帧间差分法,三帧差分法一定程度上解决了对目标运动速度的敏感性,增加了系统的鲁棒性。同帧间差分法相同,三帧差分法可以对噪声进行有效的抑制。帧间差分法和三帧差分法本质上相同,都采用相邻帧间的差值,寻找帧间不同的像素点,提取运动目标,因此是有着相同计算模式的两种算法。在选择帧间差距的时候由于目标运动速度的差异,也导致了三帧差分法的计算结果中部分目标中心会有“空洞”出现。所以此处结合三帧差分自身的特点及运动目标周围的环境,制定算法。其具体的流程如图1所示。
其具体步骤为:
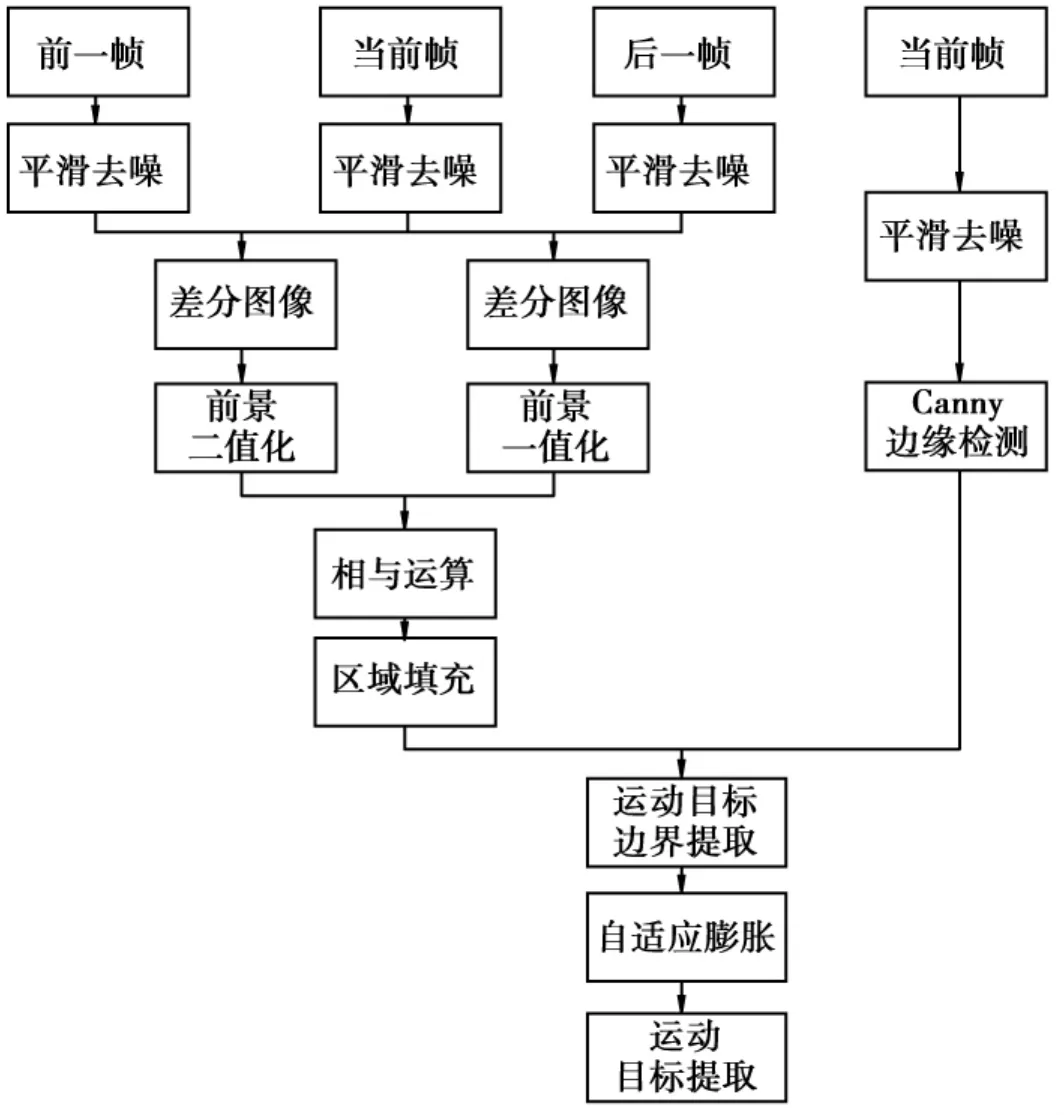
图1 程序流程图
(1)分别对当前帧 f(x,y,t),前一帧 f(x,y,t-1),后一帧 f(x,y,t+1)进行平滑去噪;
(2)f(x,y,t),f(x,y,t-1),f(x,y,t+1)分别做差分,得到差分图像 D1(x,y,t),D2(x,y,t);
(3)分别对差分结果 D1(x,y,t),D2(x,y,t)进行阈值二值化;
(4)对二值化后的差分结果进行相“与”运算,得到相“与”结果B(x,y,t);
(5)对 B(x,y,t)进行区域填充;
(6)对平滑去噪后当前帧f(x,y,t)进行Canny算子边缘检测,得到当前帧的物体边缘结构;
(7)将当前帧的边缘结构与步骤(5)的结果相“与”,得到运动目标的边界;
(8)将(7)得到的目标边界利用椭圆自适应膨胀,进一步完善不完整的边界,从而得到封闭的边界图像,从而实现运动目标的顺利提取。
此外,考虑到三帧差分法的计算量较背景差分法有较大的增加,因此将帧间间隔从连续的3帧扩大到相隔N帧的3帧,其中2≤N≤5,N的取值为经验值,在这个范围内,目标运动速度小范围的波动,程序仍然能够保持准确性和稳定性。
3 实验结果分析
利用此处的方法在普通PC机(CPU为Intel(R)Pentium 2.00G Hz,内存为2 GB)上,利用VC++6.0和Opencv1.0实现对图像图序列的处理,图像序列的格式为 JPG,25帧/秒。检测结果如图2所示:
图2(a)—(d)为图像序列中每隔5帧提取的图像;图2(e)—(h)是三帧差分的结果;图2(i)—(l)是此处算法提取的目标边缘结果;图2(m)—(p)是目标区域提取结果。可以看出三帧差分法检测到的目标很模糊,而且轮廓不清晰,而文中算法可以比较准确的提取到目标的运动边界,且对车辆等刚体的边缘提取效果明显,解决了传统三帧差分算法里的边缘检测不完整的问题。此外,提取的目标区域结果比较完整,尤其对面积较大的目标提取效果良好,一定程度上解决了三帧差分算法易产生目标“空洞”的缺点,能准确的实现目标区域的提取。
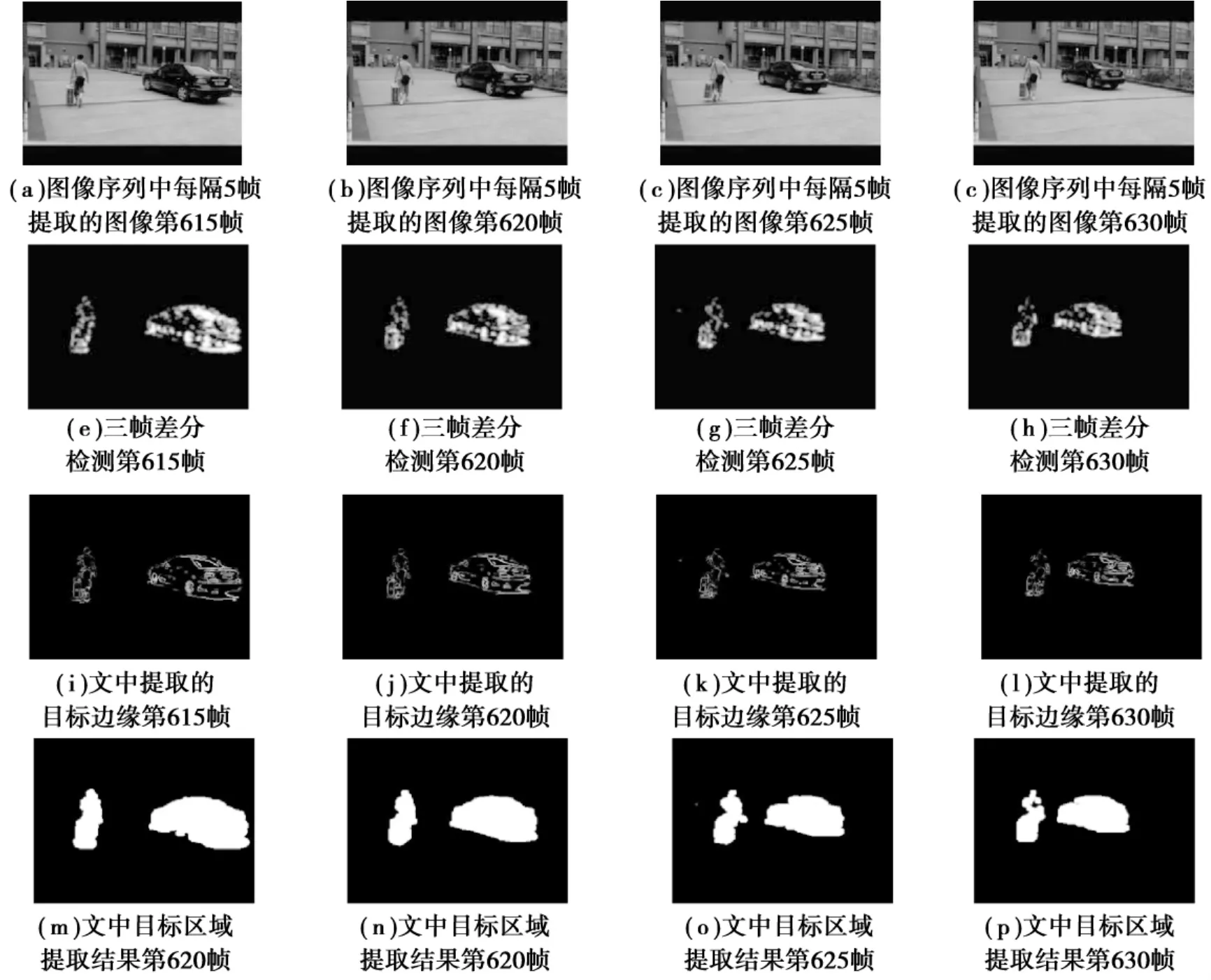
图2 图像序列检测结果
4 结论
提出了基于三帧差分和Canny算子边缘检测相结合的运动目标检测方法。该方法的优点在于当有运动目标存在时,能准确地将运动边缘检测出来;另外,该方法也较好的实现了运动目标的提取。实验结果表明,该方法快速准确,有一定的实用价值,不仅在光照变化和背景变化的条件下能够检测到目标的边缘,而且在运动目标周围背景存在过多边缘时,仍能够检测到目标的边缘,而且目标信息完整,抗噪性能佳。但该方法在运动目标面积较小的情况下,填充效果不理想,是下一步需要继续研究的方向。
[1]HARTAOHU I,HARWOOD D,DAVIS L.Real-time surveillance of people and their activities[J].IEEE Trans Pattern Analysis and Ma2 chine Intelligence,2000,22(8):809-830
[2]LIPTON A,FUJIYOSHI H,PATIL R.Moving target classification and tracking from real-time video[A].Proc IEEE Workshop on Application of Computer Vision[C].Princeton:NJ,1998:8-14
[3]MEYER D,DENZ LE J,N IEMANN H.Model based extraction of articulated objects in image sequences for gait analysis[A].Proc IEEE Interl national Conference on I mage Processing[C].Santa Barbara,California,1997:78-81
[4]陈春雨,姚秋香,乔玉龙.基于帧差法和边缘检测法的视频分割算法[J].济南大学学报:自然科学版,2012,26(1):31-35
[5]张 鹤,吴谨,吴雪垠.结合对称差分和边界信息的运动目标检测方法[J].信息技术,2011(11):138-141
[6]莫林,廖鹏,刘勋.一种基于背景减除与三帧差分的运动目标检测算法[J].微计算机信息,2009(12):274-276
[7]GONZALEZ R C,WOODS R E.数学图像处理[M].2版.阮裘琦,阮宇智,译.北京:电子工业出版社,2007
