基于遇卡识别的改进Kalman滤波器模型-加速度校正方法
2013-04-27赖富强孙建孟李光云
赖富强,孙建孟,李光云
(1.重庆科技学院复杂油气田勘探开发重庆市重点实验室,重庆401331;2.中国石油大学地球科学与技术学院,山东青岛266580)
FMI成像测井数据采集系统获取的“记录深度”,一般是在井口按照规则的电缆深度间隔记录,而井下仪器沿着井轴的实际位置才是“真实深度”。众所周知,井下的“真实深度”和井口的“记录深度”并不完全一致,存在着一定的偏差,从而导致测井曲线和图像出现异常现象,特别是在高分辨率电成像测井仪(FMI)中表现尤为明显[1]。其原因主要有两点:一是由于井壁的粘滞作用,引起仪器在井下作缓慢的非匀速运动,同时连接仪器的电缆具有弹性,不能及时将这种非匀速运动反映到井口,造成电缆记录深度与仪器真实深度之间出现偏差,导致成像图上出现锯齿现象;二是由于井斜、井眼不规则以及井壁泥饼等对仪器的阻尼作用,导致仪器在井下被“卡停”以及电缆张力摆脱静摩擦力“解卡”后作轻微的“yo-yo”滑动现象,在成像图上呈现出整段的压缩和拉伸现象。这两种情况将导致成像图像出现严重的失真,掩盖了地层的真实情况,严重影响地质家的判断,因此需要通过加速度校正来恢复采样数据对应的真实深度,消除仪器非匀速运动引起的粘滞滑动区域和遇卡区域的图像异常现象。加速度校正方面,前人做了许多相关研究:毛志强[2](1991)对测量的加速度信息进行积分来校正地层倾角测井数据;肖加奇[3](1994)采用递推最小二乘法对微电阻率扫描测井曲线进行了加速度和速度校正;国外哈里伯顿公司利用电缆张力和加速度信息进行速度校正(Robert[6],2003);斯伦贝谢公司采用Kalman滤波方法预测仪器的真实深度(Chan[4],1985;Howard[5],1991;Belougne[1],1996;王敏[7];赖富强等[12])。综合分析认为,对加速度曲线进行二次积分得到深度的方法,由于很难消除累积积分误差而导致结果失准;而Kalman滤波方法对仪器真实深度的预测和校正效果较好,赖富强等[12-13]曾对传统的卡尔曼滤波器模型加速度校正方法进行了研究,对仪器的一般非匀速运动导致的异常现象进行了有效的校正,但是传统Kalman滤波器模型没有对仪器在井下遇卡时和解卡后的复杂运动状态进行详细分析,无法得到准确的滤波系数,对“遇卡区域”适应性较差。因此,笔者首先对仪器在井下的复杂运动状态进行详细分析识别出仪器的“遇卡区域”,然后利用遇卡识别结果对传统的Kalman滤波器数学模型进行改进,充分考虑相邻遇卡现象的叠加情况,最后用FMI实测数据对改进Kalman滤波器模型进行验证。
1 仪器遇卡的识别方法
仪器遇卡判断基于一个事实:由于电缆具有弹性,仪器的速度不可能在任何一个井段内保持固定值,除非是一直等于电缆速度(但在实际测井中不太可能出现如此理想的情况)[1]。因此,当测量的加速度曲线在一定的时间窗内表现为平直线段,且接近零值,同时在时间窗起点处仪器预测速度远小于井口电缆速度时,基本可以判定仪器遇卡。另外,加速度曲线在遇卡的时候,会出现一个阻尼衰减振动,卡停瞬间出现很大的负值,恢复时出现一个极大的正值,同时电缆张力曲线在遇卡时逐渐增大,而电扣所测的电导率曲线在仪器遇卡时一般呈直杠形,在仪器解卡过程中被压缩[7]。
根据上述仪器遇卡判断原理,本文中采用的仪器遇卡识别方法见流程图1,本方法最终生成一个仪器遇卡指示函数I(k),当I(k)=1时,表明仪器遇卡,否则I(k)=0,可以用来优化Kalman滤波系数。从图1可以看出,该方法在每个深度点上,首先检测上一个点是否遇卡,如果没有,那么检测仪器的预测速度是否低于门限值δ,如果低于门限值,那么继续检测加速度在一定窗长内的方差和绝对平均值是否分别低于门限值ε1和ε2,如果这些条件都满足的话,再附加检测加速度过零点位置的能量是否大于窗口内其他所有点的能量,满足的情况下,加速度过零点的位置为仪器遇卡的起始位置,设置I(k)=1,完成一次循环判断。如果在当前循环开始的时候已经遇卡,那么就不用进行仪器速度和是否过零点的检测,只需要检测加速度的方差和均值是否满足遇卡条件,当不满足遇卡条件的情况下,窗口内加速度最后一个过零点的位置为仪器解卡的位置,之前都视为遇卡区域。至此,完成一个遇卡区域的循环判断,继续移动深度点完成整个井段的探测。
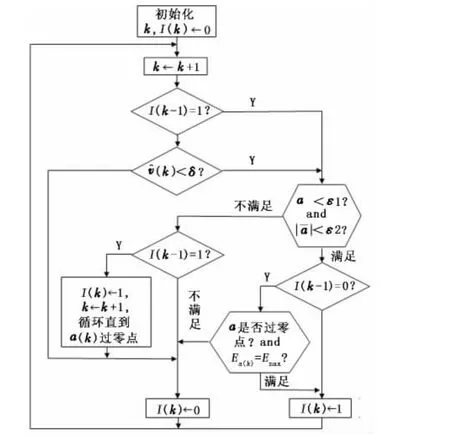
图1 仪器遇卡识别方法流程图Fig.1 Flow chart of instrument sticking recognition method
图2是以FMI实测数据为例,利用上述遇卡识别方法对10 m长的电成像测井数据进行识别得到的成果曲线图,在井段2554.5~2555.1 m、2556.25~2556.35 m、2556.8~2557 m、2560.35~2560.58 m、2562.65~2 562.82 m五处仪器遇卡,加速度曲线(FCAZ)在遇卡时出现一个极小值,然后在解卡是出现一个极大值,而张力曲线(TENS)遇卡时逐渐增大,解卡时突然减小,电阻率曲线在遇卡过程中出现直杠现象,解卡过程中出现被压缩现象,在2554.5~2555.1 m处比较明显。值得说明的是,电成像测井仪器的测斜系统和测量电扣之间存在着一个深度差,故极板电扣曲线和加速度曲线并不是对齐的。最后一道是根据加速度、速度和电缆张力曲线识别出来的遇卡指示线,1代表遇卡,0代表正常,由图可知,采用本文的方法非常准确地识别出了仪器的遇卡情况。
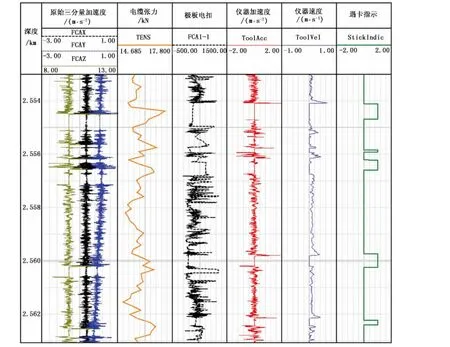
图2 仪器遇卡识别成果曲线图Fig.2 Result curves of instrument sticking recognition
2 传统Kalman滤波器-加速度校正方法
Kalman滤波器是由Kalman提出的一种递推式滤波方法,即用一个状态方程和一个测量方程来完整地描述线性动态过程[8-9],其在许多领域得到广泛应用[10-11]。本中将Kalman滤波器应用到测井数据采集与预处理系统中,首先建立了文献[7]提出的传统Kalman滤波器-加速度校正方法,然后对其校正效果进行验证分析,最后提出改进方案。
传统Kalman滤波器-加速度校正方法的状态方程表示为

式中,a(k)、v(k)、z(k)为k时刻仪器的加速度、速度和深度;T为采样时间间隔,引入na(k)表示a(k)在测量以及预测过程中可能带来的误差,将式(1)展开就是匀加速度运动的速度和位移公式,上标“-”表示预测前的值,“+”表示预测后的值。同时,设电缆深度为y(k),ny(k)用来衡量电缆深度与仪器真实深度之间的瞬时误差,测量方程可表示为

传统Kalman滤波器-加速度校正方法中,式(1)中的na(k)和式(2)中的ny(k)均被假设为均值为零的高斯白噪声,均方差(k)(k)为常数[7]。由此构造出加速度校正的Kalman滤波预测器模型如下:

式中,G1(k)和G2(k)为反馈增益,由误差协方差矩阵 P(k)推导得出[13],详见文献[7]。
由式(1)、(2)、(3)组成传统的Kalman滤波器-加速度校正方法,以此预测出每个k时刻的仪器速度和真实深度,最后利用Akima插值方法[13]对真实深度对应的极板数据进行重采样并重新生成FMI成像图像。图3是本文采用传统Kalman滤波器-加速度校正方法对一段FMI实测数据进行编程处理得到的结果。经过对比可以看出,在“粘滞滑动区域”(图3中上下两个矩形虚线框所示,该区域加速度和速度曲线波动较小,仪器作非匀速运动,但没有遇卡):原始电成像图上层理特征出现锯齿和错动现象,采用传统Kalman滤波器-加速度校正方法能较好地恢复地层的层理特征,消除错动现象,校正效果明显优于采用直接二次积分法得到的校正图像;而在“遇卡区域”(图3中间矩形点线框所示,该区域仪器加速度波动较大,预测速度出现零值,遇卡指数曲线指示仪器遇卡):原始电成像图上出现大段压缩和拉伸现象,采用传统Kalman滤波器-加速度校正方法和直接二次积分法得到的校正图像效果均不理想。
经过多次试验分析得出,采用传统Kalman滤波器-加速度校正方法能够对“粘滞滑动区域”的非匀速运动起到较好的校正效果,但在“遇卡区域”的校正效果较差。原因在于:当仪器遇卡和解卡时,真实深度与记录的电缆深度之间的偏差ny(k)急剧增加,如果此时不实时调整滤波器预测模型中对电缆深度实测值的依赖比重(k),会严重影响预测结果,但传统Kalman滤波器-加速度校正方法中(k)设置为常数,没有进行针对处理,故对“遇卡区域”的校正效果不理想。
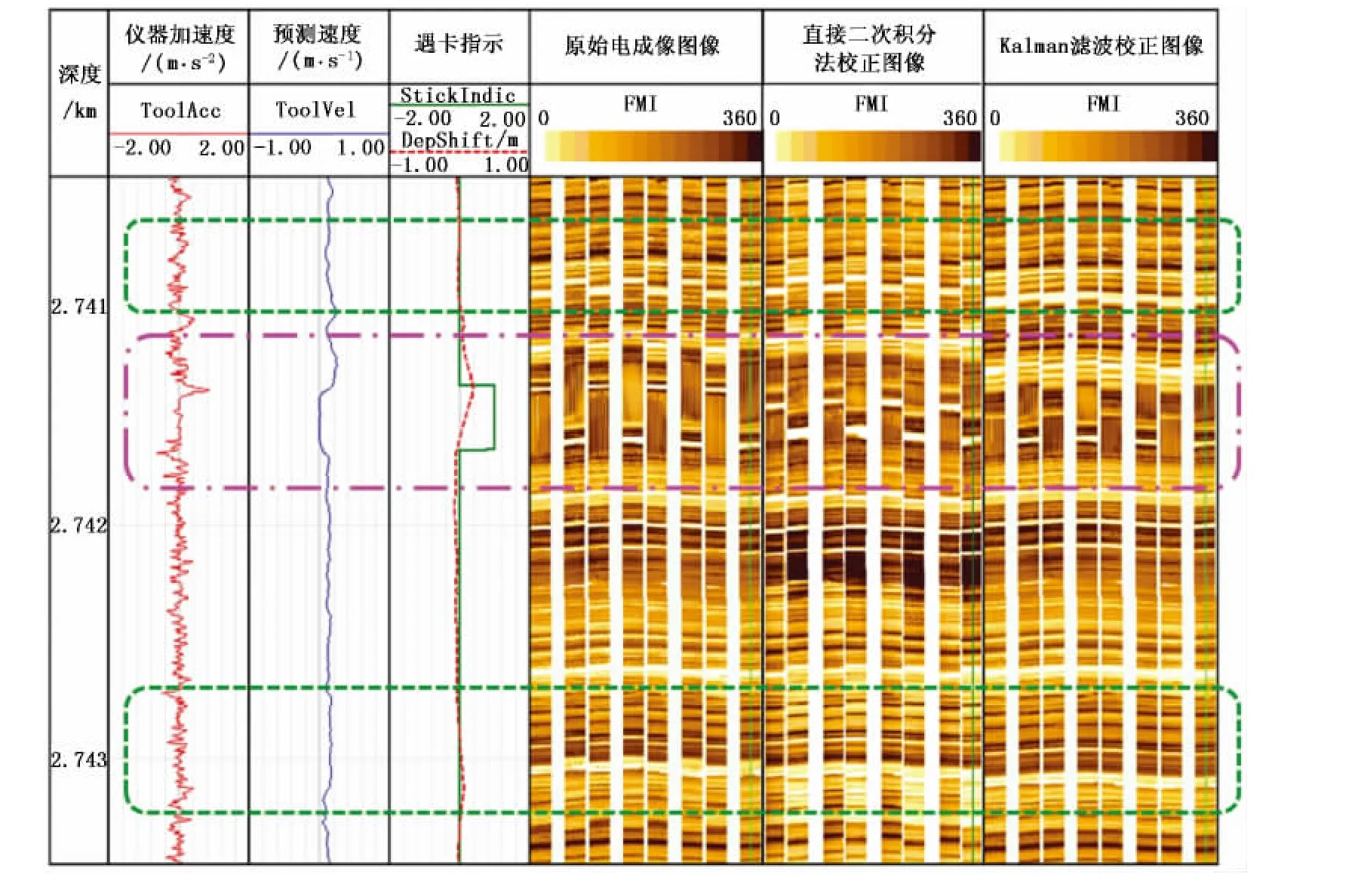
图3 传统Kalman滤波器-加速度校正成果对比图Fig.3 Result of traditional Kalman filter model-acceleration correction method
3 改进的Kalman滤波器-加速度校正模型
鉴于传统Kalman滤波器-加速度校正方法对“遇卡区域”的不适应,本文提出利用遇卡识别结果实时改进传统Kalman滤波器模型的方法,适应“遇卡区域”的加速度校正。具体是针对Kalman滤波器模型中影响反馈增益矩阵和误差协方差矩阵的电缆深度测量误差函数k)进行改进,从仪器遇卡前、仪器遇卡时和仪器解卡后三个方面进行考虑。
模型改进的指导思想是:仪器遇卡前,Kalman滤波器模型不作调整,沿用传统Kalman滤波器模型k)为常数;当仪器遇卡时,电缆测量深度的误差逐渐增加,Kalman滤波器预测模型应减小对电缆测量深度的依赖比重,更多地依赖加速度计测量值来进行模型外推预测,因此此时k)应设计为实时的增大来反映“遇卡区域”电缆测量深度误差的增加;当仪器解卡后(k)应设计为逐渐减小,直至恢复到遇卡前的状态。根据这一指导思想,又由于σy(k)将与电缆深度y(k)成比例关系,将(k)设计为

式中,c为常数;vc(k)为电缆速度;f(k)设计为I(k)的函数,实时改变(k)值。f(k)由试验分析推导而来,当仪器遇卡前,f(k)=0;当仪器遇卡时,f(k)逐渐增加使σy(k)增大,反映电缆测量深度误差增加(图4的ab段);当遇卡结束时,f(k)达到最大值,并保持一定时间不变后才逐渐减小恢复到零(图4的bc段),这样设计的目的在于仪器解卡后可能做复杂的“yo-yo”运动,电缆的测量深度仍然不可靠,所以给电缆系统一定的时间恢复到常态,这里的一定时间设计为仪器遇卡的时间长度;仪器解卡后,f(k)逐步减小,使σy(k)逐渐恢复到常态(图4的cd段)。
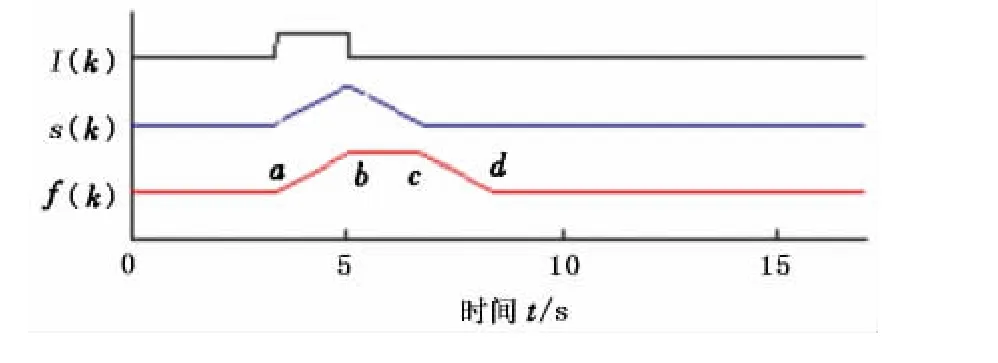
图4 f(k)的设计示意图Fig.4 Schematic diagram of f(k)
在f(k)设计试验过程中发现,如果在f(k)恢复到零之前,仪器又遇到遇卡现象,那么f(k)变得比图5(a)更为复杂,因为两次遇卡情况叠加在一起,f(k)就得考虑上一次遇卡和新的遇卡现象的累积效应,图5(b)~(e)分四种情况充分考虑了两次遇卡的叠加现象。图5(b)和图5(c)均显示了新的遇卡发生在f(k)减小之前,而图5(b)和图5(c)的区别是第二次遇卡时间比第一次短和长;图5(d)和(e)都显示了新的遇卡发生在f(k)减小之后,同样图5(d)和图5(e)的区别同样是第二次遇卡时间比第一次短和长;图5(f)为新的遇卡发生在f(k)返回零之后,即仪器正常运行后的又一次遇卡,即为图5(a)现象的重复。通过对图5六种遇卡情况进行分析,最终推导出Kalman滤波器改进模型中f(k)的表达式:
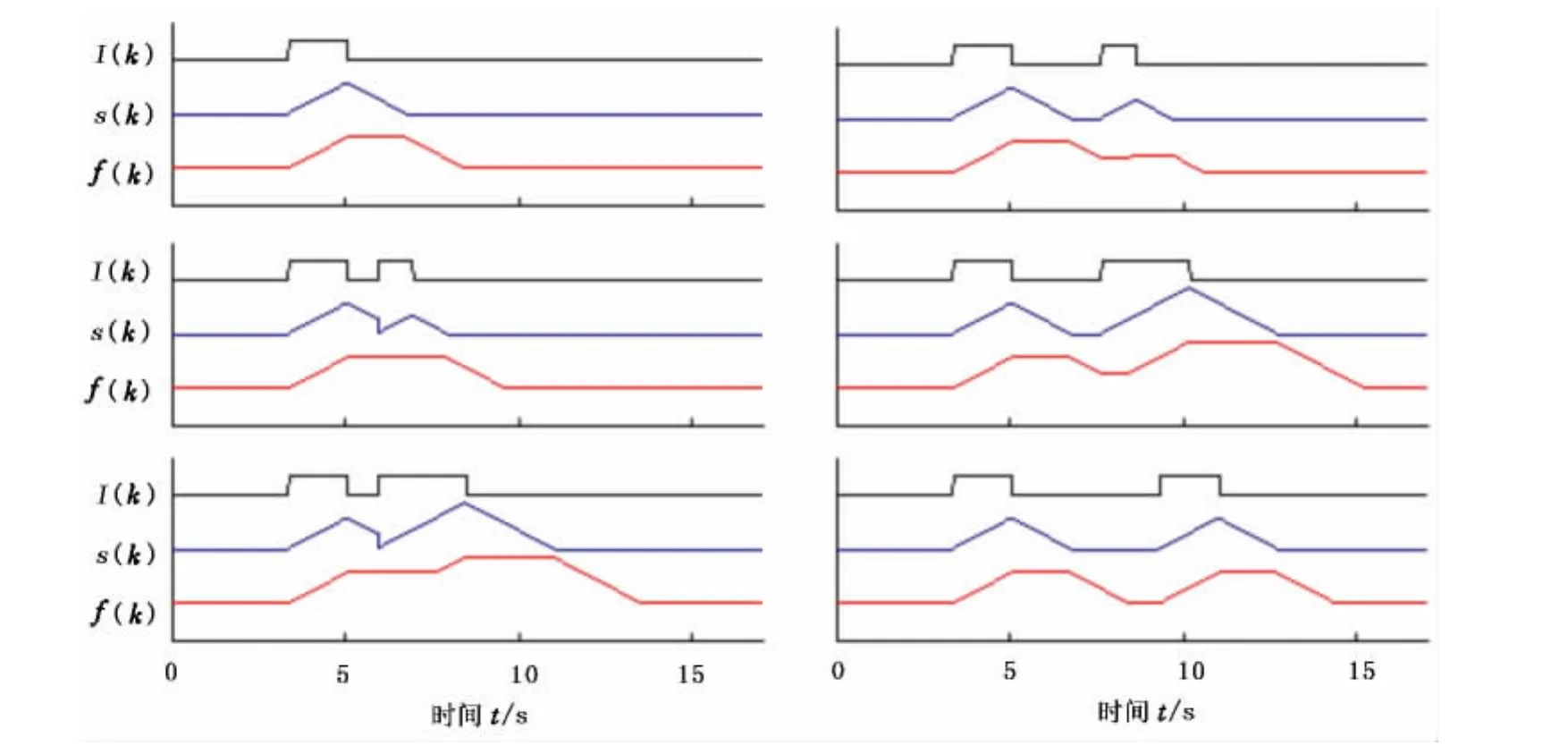
图5 仪器遇卡后各种情况下f(k)随I(k)变化的示意图Fig.5 Schematic diagram of all kinds of superposition between two adjacent sticking events

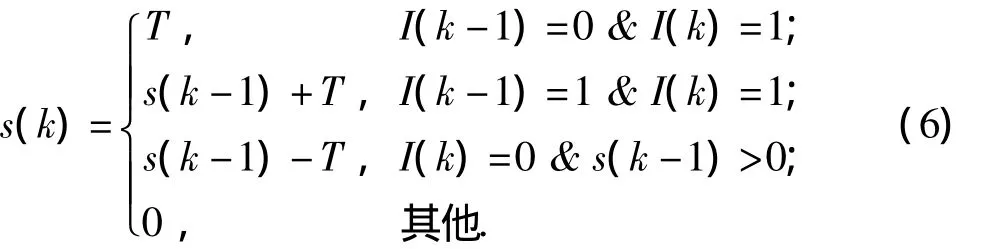
其中s(k)为中间变量,直接随I(k)变化,设计为
4 应用效果分析
应用改进的Kalman滤波器-加速度校正方法,对图3所示的FMI实测数据进行重新处理,并将加速度校正后的成像图像与传统Kalman滤波器-加速度校正方法得到的图像进行对比分析,结果见图6。

图6 改进Kalman滤波器-加速度校正成果对比图Fig.6 Result of improved Kalman filter model-acceleration correction method
可以看出:在“粘滞滑动区域”(图6(a)中上下两个矩形虚线框所示),采用改进Kalman滤波器-加速度校正方法能够很好地恢复地层的层理特征,消除错动现象,与传统Kalman滤波校正效果相当;而在“遇卡区域”(图6(a)中间矩形点线框所示),传统Kalman滤波校正图像上仍然存在压缩和拉伸现象,而改进Kalman滤波校正图像完全消除了由于仪器遇卡导致的大段压缩、拉伸现象,使地层的层理特征得以清晰呈现(见图6(a)中遇卡区域内的椭圆形虚线框)。证明了改进后的Kalman滤波器-加速度校正方法的正确性和优越性:既能校正“粘滞滑动区域”的一般非匀速运动,又能解决“遇卡区域”的拉伸压缩现象。将改进Kalman滤波器-加速度校正方法应用到相邻井段(2 558.5~2 561.5 m),图6(b)所示的加速度校正成果图例再次验证了方法的有效性。图6(b)虚线框区域(2560.05~2 560.7 m)仪器明显遇卡,原始电成像图上底部出现严重的拉伸、顶部出现压缩现象,传统的Kalman滤波模型在一定程度上缓减了图像的拉伸压缩现象,但是图像上仍然存在小段拉伸假象,而改进Kalman滤波器-加速度校正方法的校正结果完全消除了图像的拉伸压缩现象,使地层的裂缝、层理等细微特征得以重现。
5 结论
(1)提出的FMI成像测井仪器遇卡识别方法以及在此基础上改进的Kalman滤波器模型-加速度校正方法,有效地解决了由井下仪器非匀速运动引起的“粘滞滑动区域”图像锯齿现象和“遇卡区域”大段图像压缩拉伸现象,与直接二次积分法和传统的Kalman滤波器模型-加速度校正方法相比更具优越性和适应性。
(2)由于井下仪器电缆的弹性并不规则,Kalman滤波器模型中ny(k)并不是一个标准的白噪声随机过程,更精确的模型需要更加详细的探头和电缆系统物理参数,这些可靠性参数很难获取,预测结果表明经过本文改进的Kalman滤波器白噪声模型足以应付井下仪器出现的大多数非匀速情况,包括“yo-yo”现象。
(3)该方法不仅适用于FMI成像测井,同样适用于其他成像测井系列,尤其有助于改善国产成像仪器图像的质量,具有推广应用价值。
[1] BELOUGNE V,FAIVRE O,JAMMES L,et al.Real time speed correction of logging data:Thirty-sixth Annual Logging Symposium,New Orleans,June 16-19,1996[C].Houston:SPWLA,1996.
[2] 毛志强.现代地层倾角测井速度校正方法[J].江汉石油学院学报,1991,13(1):38-43.MAO Zhi-qiang.A method for logging speed correction in modern diplog[J].Journal of Jianghan Petroleum Institute,1991,13(1):38-43.
[3] 肖加奇,陈文荣,王哲然.用递推最小二乘法对微电阻率扫描测井进行速度与加速度校正[J].测井技术,1994,18(3):204-211.
XIAO Jia-qi,CHEN Wen-rong,WANG Zhe-ran.The speed and acceleration correction of micro resistivity scanner logs with recursive least square algorithm[J].Well Logging Technology,1994,18(3):204-211.
[4] CHAN DSK.Method and apparatus for measuring the depth of a tool in a borehole:US,4545242[P].1985-10-08.
[5] HOWARD A Q.Depth determination system using parameter estimation for a downhole well logging apparatus:US 5019978[P].1991-05-28.
[6] ROBERT W S.Speed correction using cable tension:US,6618675[P].2002-12-26.
[7] 王敏,孙建孟,赖富强,等.全井眼地层微成像仪测井图像失真的恢复技术[J].中国石油大学学报:自然科学版,2010,34(2):47-51.
WANG Min,SUN Jian-meng,LAI Fu-qiang,et al.Recovery technology of distorted image from fullbore formation micro imager[J].Journal of China University of Petroleum(Edition of Natural Science),2010,34(2):47-55.
[8] KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of Basic Engineering,1960,82(1):35-45.
[9] KALMAN R E,BUCY R S.New results in linear filtering and prediction theory[J].Journal of Basic Engineering,1961,83:95-107.
[10] ANDERSON BDO,MOORE J B.Optimal filtering[M].Englewood Cliffs,NJ:Prentice-Hall,1979.
[11] 邵才瑞.井筒数据的Akima插值重采样方法[J].测井技术,2004,28(2):112-114.
SHAO Cai-rui.An Akima interpolation method for borehole data resampling[J].Well Logging Technology,2004,28(2):112-114.
[12] 赖富强,孙建孟.基于卡尔曼滤波的FMI成像测井加速度校正研究[C]//中国地球物理学会第二十五届年会论文集.合肥:中国科学技术大学出版社,1999.
[13] 赖富强.电成像测井处理及解释方法研究[D].青岛:中国石油大学地球科学与技术学院,2011.
LAI Fu-qiang.Micro-resistivity image logging processing and interpretation methods research[D].Qingdao:School of Geosciences,China University of Petroleum,2011.
