步进电机控制自整角机生成正弦控制信号方法
2013-04-25谭锡联徐亨成
姜 霖,谭锡联,邹 涛,徐亨成
(1.空军第一航空学院 航空仪电工程系,河南 信阳464000;2.防空兵学院 高炮系,河南 郑州450052)
正弦控制信号是某型装备随动系统性能检测必不可少的控制信号,其一般由机电模拟的正弦机产生,该种方法存在设备旧、体积大、造价高和控制不便等缺陷[1]。随着数字技术的发展,正弦信号逐渐由计算机控制的数字/自整角信号模块产生,但此种方法也存在着造价高的问题。为适应随动系统检测的需要,采用步进电机控制自整角机生成了正弦控制信号。步进电机是一种性能良好的数字化执行元件,广泛应用于各类开环控制系统中。该步进电机控制自整角机生成正弦信号的方法充分利用了步进电机数字化的特性,为正弦信号的控制带来了较大的灵活性,且具有实现容易、造价低廉的特点。
1 单片机产生正弦曲线的数学模型
在单片机中实时计算正弦曲线较为困难,因此一般采用离散化方法,事先计算某些离散点,再用折线或直线拟合[2]。一种可行的方法是将正弦函数按时间间隔均匀划分为n段,如图1所示。图中,Δt表示均匀时间段。

式中,T表示用户设定的正弦信号的周期。

图1 正弦曲线离散过程
通过正弦曲线表达式计算出每个时间段的步进电机步进速率。

式中,A表示均匀时间段内正弦信号的振幅;A*用户设定的正弦信号振幅。
步进电机的步进速率是通过其线圈电源导通时间的长短控制的。因此,步进电机的转动速度可在单片机的控制下按正弦规律变化,步进电机再带动自整角机转子转动,由自整角机产生与转子转动相同的正弦控制信号。步进电机的控制涉及到诸多时间参数,而利用单片机的定时器可协调这些时间参数,所以步进电机的执行动作最终落实到了单片机定时器的溢出率上。而步进电机步进半步所需的时间为

式中,tb表示一个步进电机步进一个半步所需的时间;θb表示步进电机的步距角;A*是设定的正弦信号的振幅;则溢出率为

通过式(1)~式(4)计算出单片机定时器溢出率ty,并通过一定的格式发送至步进电机控制电路。
由上述分析可看出:当n越大时,通过直线或折线拟合出的曲线则越接近正弦曲线,但由于步进电机对数字量有一个固定的反应时间,所以n的取值有一定限制。观察正弦曲线易知n的取值跟正弦曲线的周期有一定关系,文中n值的取值算法如下

式中,T表示正弦信号的周期;k表示一个比例系数,经反复的试验得出k=250时既能保证正弦曲线的离散足够精细,又能使步进电机不失真地反映数字量。
2 软件和硬件设计与实现
2.1 硬件原理
图2给出了方法实现的硬件原理图,主要包括控制、光耦隔离和执行部分。

图2 步进电机控制的硬件原理图
单片机89C2051通过串口接收上位机软件计算出正弦数据,然后通过P3.4、P3.5、P3.3这3个I/O口对步进电机进行控制,由于步进电机运行是在脉冲供电工作下的感性负载,所以自感干扰较强烈,为抑制干扰,采取了光耦隔离的方法。由图可知单片机每个输出脚对应了步进电机的一相线圈,单片机按照一定规律拉低3个输出脚,便可使步进电机的对应相导通,使步进电机转动。
2.2 上位机操作软件
上位机软件采用C++Builde编写,软件主要功能是将用户设定的基本参数的正弦信号离散化,计算出均匀时间段里步进电机的速率和单片机定时器溢出率,并按照协议数据格式进行打包,将相应规律的指令和数据通过串口进行发送。
2.3 步进电机控制软件
由于在步进电机的控制中对时间的要求较高,所以最终的控制环节采取了与硬件结合更紧密的汇编语言进行编程[3]。
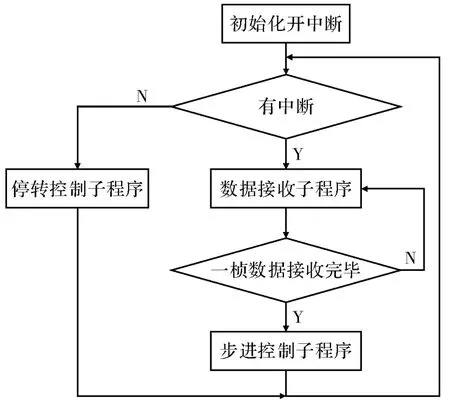
图3 步进电机控制流程图
3 步进电机控制中应注意的问题
3.1 步进电机停转时的控制问题
步进电机停转时仍需控制,主要有两个原因:首先,步进电机是一种功率元件,线圈在工作时发热量大,所以不能长时间使电机的某一相或几相通电,由此会导致电机过热而烧毁。即使当电机无需输出时,也要有选择地给步进电机的某相或某几相通断电。其次,若停转时不进行处理,长时间的保持步进电机的某个状态会使步进电机的某相或某几相累积过大的电感,当要切换到下一状态时,由于积累的电感会对突然断电的某相或某几相产生力矩,使步进电机向预定方向的反方向转动一个角度,若需将转换状态的磁场建立起时,定子和转子的位置已不再一致,便会导致失步[4-6]。
3.2 最佳导通时间问题
步进电机线圈控制脉冲的最佳导通时间因电机型号而异,不同的步进电机有其最合适的线圈通电时间,经反复试验,文中使用的常州电机厂生产的45BC340E型步进电机的线圈通电时间约为530μs时,电机可工作于最佳状态:既不会因通电时间过短而失步,又不会因通电时间长而过热。
4 控制结果
图4描述了当步进电机工作时,控制脉冲与步进电机定子线圈上工作电压的关系。

图4 步进电机工作曲线图
从图中可看出:当步进电机停转时,电路中仍存在规则的控制脉冲;而实际上步进电机转动的时间较少,可控制的时间参数为停转时间,停转的时间越长,步进电机速率越小。若利用程序控制步进电机停转的时间按照正弦规律变化时,步进电机便通过机械铰链将该种转动规律传递至自整角机上,从而形成正弦工作状态。
5 结束语
步进电机控制同步机生成正弦信号的方法控制灵活、实现简单,对实验室条件下的同步机教学与研究具有积极意义,但该方法中涉及的传递环节较多,正弦信号也并非直接生成,如何更精确地拟合正弦信号仍值得进一步的研究。
[1] 王鸿钰.步进电机控制技术入门[M].上海:同济大学出版社,1990.
[2] 宋戈,黄鹤松,员玉良,等.51单片机应用开发范例大全[M].北京:人民邮电出版社,2010.
[3] 孙晓云,郭立炜,孙会琴.基于Lab Windows/CVI的虚拟仪器设计与应用[M].北京:电子工业出版社,2005.
[4] 李发海,王岩.电机与拖动基础[M].北京:清华大学出版社,2000.
[5] 花同.步进电机控制系统设计[J].电子工程设计,2011,19(15):13-15.
[6] 庄瑞荣,吴先球.基于LabVIEW的步进电机控制[J].现代电子技术,2012,35(4):202-204.
