基于单片机的无线遥控智能小车的设计与制作
2013-04-23青岛黄海学院姜宝华
青岛黄海学院 姜宝华
青岛滨海学院 齐 强
1.引言
随着计算机技术和各行业各领域的发展、多方面技术的成熟极大的推进了智能机器人的发展。机器人发展至今已经可以解决一些生产、生活与科研中人类当前无法完成的工作。无线遥控小车是上世纪提出的一种新型小车,由于在军事侦察、反恐、防爆、防核化及污染等危险与恶劣环境作业中有广阔的应用前景,具有体积小、成本低、生存能力强等特点,无线遥控小车得到了飞速发展[1,2]。
本文介绍的无线遥控智能车属于智能机器人的一种,该小车可在1公里范围内由无线遥控器指挥小车前进,使其完成相应的行动。可应用于危险性极高环境中的智能勘测,如火灾现场探测、公路严重破坏现场勘测、危险性气体泄漏现场勘测、矿区事故现场勘测、泥石流地震等自然灾害现场勘测等。
2.系统组成及结构原理
无线遥控智能小车分为手持设备跟小车车体两部分[3]。手持设备由单片机模块、矩阵式键盘、供电电路、12864显示模块、晶振电路、复位电路组成,系统原理图如图1所示。

图1 手持设备原理图
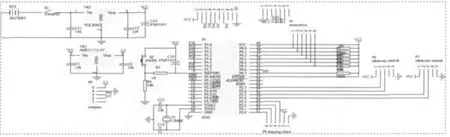
图2 车体部分原理图
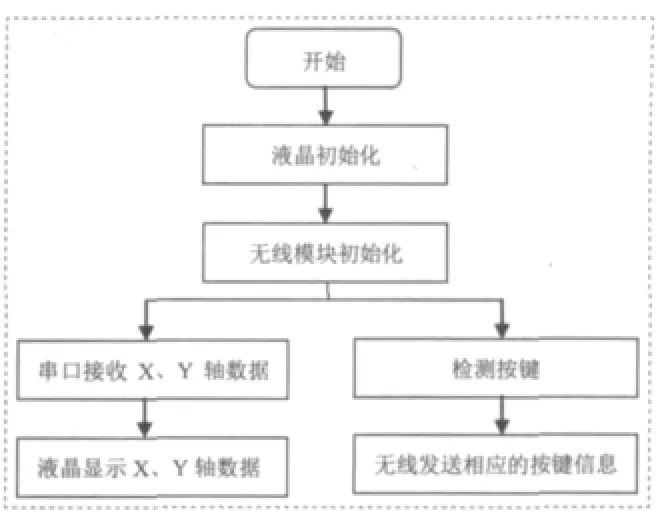
图3 手持设备流程
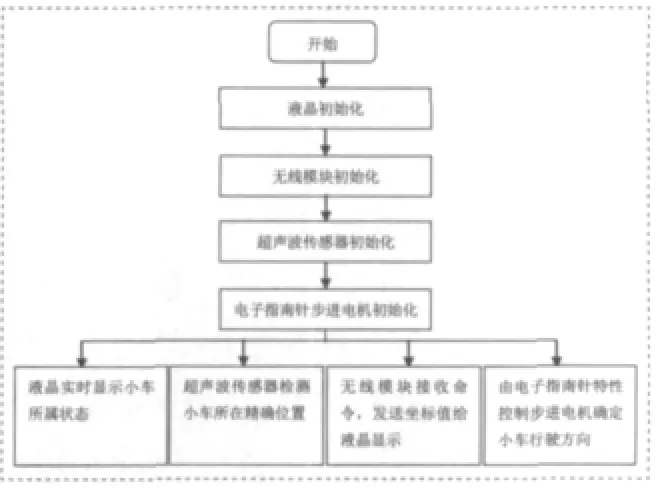
图4 主流程图
车体部分由单片机模块、电子指南针模块、超声波测距模块、供电模块、12864显示模块组成,车体部分原理图如图2所示[4]。
下面就主要模块做简要说明:
2.1 无线发送接收模块
无线发送接收模块采用APC220模块,该模块采用半双工通信方式传输指令和坐标,采用9600的波特率进行数据传输,数据稳定,3.3V供电,耗电较低。为避免数据流量过大导致数据丢失问题,终端每次向串口发送100字节每次间隔不小于347ms。
2.2 12864显示模块
采用MzLH0312864液晶显示模块。MzLH03-12864主要由行驱动器/列驱动器及128*64全点阵液晶显示器组成[5]。本设计采用直接访问方式,12864的控制引脚分别与单片机的P3口相连,模组有一个复位引脚,可以对该引脚输入一个低电平的脉冲使模组复位,复位需要低电平输入持续至少10ms,在恢复高电平后需要等待15ms后方可对模组进行显示的控制操作(即通过串行接口输入指令和数据)。MzLH03-12864模块串行SPI接口,最高时钟频率应小于或等于4.5MHz。
2.3 超声波测距模块
采用DYP-ME007模块。该模块利用回声计算障碍物距离。通过测量声波从声源到达目标然后返回声源的时间就可以测量得到距离。
3.软件程序设计
程序设计分手持设备跟小车车体两部分。手持设备软件设计如图3所示,单片机上电后初始化液晶跟无线模块,设置串行口的工作方式,随后主程序循环检测按键,如果检测到有按键按下,则调用串行口发送数据,如果串行口接收到小车发来的数据则调用液晶显示。
小车车体程序流程如图4所示,单片机上电后初始化液晶、无线模块、超声波传感器、电子指南阵模块、串行口,如果串行口接收到遥控器遥控信息,则根据指令前进、后退等。当设置坐标自动让小车行走时,每隔一定时间,利用电子指南针修正超声波传感器位置,随后利用超声波传感器测量小车位置,并把检测的数据返回给单片机,由单片机发送给手持无线遥控器中的显示模块显示具体数据。到达指定位置后停止前进。本系统软件采用C语言编写。主要包括主程序、自动驾驶子程序、手动收发子程序等。
4.测试结果结论
4.1 测试仪表
测试采用秒表、刻度尺、卷尺等仪器。
4.2 测试方法
(1)将车放在空旷地域,开启电源开关。由手持无线遥控器在1公里范围内控制小车前进、转向、倒退。
(2)将小车放在120cm*120cm大小的木板上,在木板上制定坐标X轴、Y轴,设置好坐标后让小车自动跑到该位置。
4.3 测试结果及结论
经多次测量,无线遥控器在1公里以内控制小车情况良好;在120cm*120cm并制定了坐标的范围内电动小车能将其位置的坐标值实时传送至手持无线遥控器,手持无线遥控器给定坐标后小车能够找到目标地点并到达指定地点,定点误差小。
本文基于单片机模块,结合各种传感器设计了一种无线遥控智能小车。该小车可以完成行驶、反馈目标、寻找目标等多项功能,定位准确,价格低廉,进一步开发可实现在特殊环境完成各种任务。
[1]戴圣伟,陈白帆,范绍成.无线遥控智能车的控制研究[J].控制技术计算机测量与控制,2011,19(9):2125-2127.
[2]咸宝金,陈松涛.智能移动机器人多传感器信息融合及应用研究[J].宇航计测技术,2010,30(2):42-44.
[3]叶郑凯,朱建鸿,李琳,王幼琴.基于单片机的无线遥控智能小车的设计与实现[J].计算机与现代化,2012,10(206):65-67.
[4]陈海松,李益民.基于AT89C51单片机的智能避障遥控机器人的设计[J].黄石理工学院学报,2011,27(3):9-12.[5]伍刚,周玉荣.基于SPCE061A单片机实现智能小车设计[J].单片机开发与应用,2010,26(2-2):120-122.
