打造猎鹰之爪
——自动抓球机器手的设计制作
2013-04-21文浙江省安吉县高级中学109班吴凯方瑶任业正
文浙江省安吉县高级中学109班吴凯方瑶任业正
打造猎鹰之爪
——自动抓球机器手的设计制作
文浙江省安吉县高级中学109班吴凯方瑶任业正

随着高新技术发展日新月异,机器人逐渐成为国内外科技人员的研究课题,中国每年举办的大学生机器人大赛也着实吸引了许多人,尤其是我们青年学生的眼球。
一次讨论时,吴凯见识了智能化机器人的魅力后提出,虽然以我们现在的能力还不能做成一个完整的机器人,但能否做一个智能的手臂来转移物体呢?经过讨论,我们决定做一个能自动抓球的机器手。
我们把想法告诉科技辅导老师后,得到了他的鼓励和支持。学校的劳技教室有车床、操作台等工具和编程用的电脑、下载用的芯片等,这为我们开展该项目提供了条件。
俗话说:“三军未动,粮草先行”、“知己知彼,百战不殆”,所以我们先上网查找资料,找到了一些抓手及已发明的机器臂的图片。通过了解我们发现机器手的形式和抓取的方式有很多,也知道了需要哪些设备。特别是伺服电机不可少,它是一种可以在0°~180°之间任意旋转,而且可以给出向前或向后的力的精确电机。更重要的是还要用电脑软件进行编程,使机械臂智能化。
通过对智能化机器知识的了解,我们三人决定用3个伺服电机做一个具有三个自由度旋转的机器手,使其能完成一个简单的任务。
机器手的身体用简单、易得、易切割的木头来做,用废旧的电源插座外壳来做机器手的旋转平台,主控器是一个RCU,动力装置我们选用了三个伺服马达,为了让机器手更灵活、更智能,我们还设想装上感应装置,可惜后来没能实现。接着,我们分工收集材料,如螺丝钉、乒乓球、适宜的木块等。
一、制作机器手模型
我们找来两个废旧的插座外壳作为底座,将其中一个伺服电机放入其内(称为旋转驱动器),用一块小木块与泡沫固定旋转驱动器(因为电机经常摆动易受损)。
为了使两个外壳很好地组合且可转动,我们用一个连接臂将其连接起来。一开始,我们用一个“一”字型的固定片,再用圆规脚的两颗小螺丝来固定,但考虑到节约材料,我们又想到用“十字”型的固定片来固定,一头嵌在底座上,另一头用一颗小螺丝来固定,这样一个连接臂就完成了。
在控制平台上,我们安装了两个伺服电机,用于平台的一前一后,前面的是给予手臂前后伸缩的力,后一个控制手臂的张合。
由于科技老师准备了伺服马达以及一些电子设备,我们决定用马达来带动,可具体怎么做大家都一头雾水。后来通过参考网上的资料和图片,我们初步定下了方案。
手臂的制作是我们遇到的最大困难,因为手臂要考虑重力(电机的动力有限)、摩擦、形状等多种因素。一开始,我们手工制作了一个木块做的手臂,但由于厚度不够,尝试多次都不行,于是我们打算重做。
方瑶利用寒假找了一些金属片,开学后大家一起动手制作。在两块金属片间夹一块一定厚度的泡沫,经过试验,效果不错,只是泡沫的摩擦力还不够,需要改进(如图1)。
我们想到了用摩擦系数大的布料来增大摩擦力,或者在爪子的最前端用铁丝做成“]”形来固定球,不让其“跑”掉。手臂伸缩、电机的木棒转动时的半径会随手臂的伸缩而改变大小,此时吴凯想到在木棒上刻一个槽,让钉子可以上下滑动以适应相应的大小。
大家力往一处使,连续几天一到课外活动时间,就去科技馆制作教室,或设计草图或按图施工,慢慢地机器手逐渐成形,动力装置也基本解决,至此硬件部分大体完成(如图2)。

图1

图2
二、“猎鹰之爪”抓球过程设计
我们制作的机器爪子主要功能是将球从一个地方移到另一个地方,主要的构成零件是3个伺服马达及其连接部件,大部分动作完成靠这3个伺服马达完成(如图3)。

图3
伺服马达①相当于人的腰,控制着上身在0°~180°任意角扭转,将“控制台”左(或右)移动、调整爪子抓取的方向。
伺服马达②相当于大腿,它调整爪子伸出和缩回的幅度。
伺服马达③便是控制爪子的张开和合拢,是抓取球的关键。
整个工作过程如下:
机器爪子运行前,爪子呈张开状态,运行时,伺服马达①向左(或向右)转动90°,带动控制台转动,使整个爪子位于球的正前方,停隔几秒,伺服马达②向前转动,手臂伸出,使球位于爪子中心,停隔几秒,伺服马达③向前转动,爪子抓紧小球,整个“取”的过程便完成了,再者是“送回”的过程。
伺服马达②向后转动,爪子缩回,停隔几秒,伺服马达①向右(或向左)转回,使“机身”转回原位,停隔几秒,伺服马达②向前转动,爪子再次伸出停隔几秒,伺服马达③向后转动,爪子张开,球落到目标点。
整个过程可以通过“机器人快车”软件来编成程序,循环执行结束。
三、安装智能模块,编写程序
我们上网查找了有关信息和资料,了解RCU、伺服马达和感应装置的功能和使用方法,然后按照预先的设想开始编程。
毕竟这是我们第一次尝试为机器人编辑应用程序(如图4),总想早点完成编程,将其应用到机器手上,可越着急遇到的麻烦越多。好在大家都没有半途而废,多次的失败也让我们积累了经验,一周后,我们终于编出了一套切实可行的程序。接着安装智能模块,将RCU装在尾部,调整三号伺服马达的位置,平衡整体重心,又将钢丝(后来用细铅丝代替)连在一起,仿照自行车的刹车结构成为牵引,完成爪的闭合。最后通过数据线把电脑上的程序输入RCU,就算基本完工,等着调试了。
在调试中,由于智能化的要求,我们对手臂的运动范围、运行速度、取球的动作设计等进行讨论与调整,稍有一些理论基础的方瑶、任业正便开始找书、学习《机器人快车》中的程序,提供一些整体思路及细节问题的解决,吴凯则对机器手的装置进一步进行改良完善。
经过几个月的努力,机器手终于能在一定范围抓取乒乓球了,取球、放球,动作干净利索,如同工厂自动化生产线上的货物自动装卸,像“猎鹰之爪”一样灵动起来。
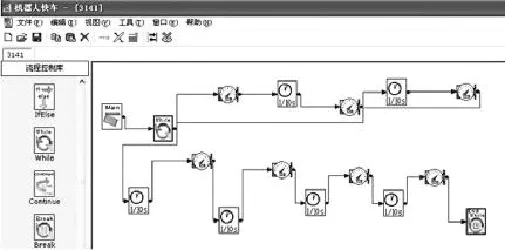
图4
(指导老师:汪文峰)