软起动器控制的矿山皮带机输送系统研究*
2013-04-03罗金盛
罗金盛
(华侨大学信息科学与工程学院)
作为矿山的高效连续运输设备,矿山皮带机具有大运量、长距离、连续输送等特点。同时矿山皮带机便于集中自动控制,运行可靠、经济,已成为矿山机电一体化的关键设备[1]。
由于矿山产能扩大,皮带输送机朝着大功率、更长距离、更大运量、高速等方向发展。对皮带输送机的起动要求进一步提高,主要体现在对起动电流加以限制。本研究探讨一种带有速度控制功能的双闭环矿山皮带机软起动器,可以在限制软起动过程电流的同时,实现速度时间最优跟随。
1 异步电动机软起动器基本原理分析
1.1 异步电动机等效电路
图1为异步电动机T型等效电路图,其中r1表示定子电阻,r'2表示已折算到定子侧的转子电阻,rm表示励磁电阻,x1表示定子漏电抗,x'2表示转子漏电抗,xm表示励磁电抗,s表示转差率。
异步电动机的定子电流可以表示为


图1 异步电动机等效电路
可以看出,定子电流与定子电压向量成正比,即通过控制定子电压,可以改变定子电流大小。
异步电动机的转矩可以表示为
式中,m1为相数;Ωs为电源角频率。
可见,转矩与定子电压的平方成正比,通过控制定子电压可以改变转矩T。
1.2 软起动器主回路[2]
上述分析表明,异步电动机的定子电流和转矩同时受到定子电压控制,可以将交流调压器用于异步电动机软起动器。软起动器结构如图2所示,主回路由3组反并联晶闸管(VT1~VT6)装置构成,只要控制好每组晶闸管的触发角,就可以控制每相交流电的导通范围,从而改变定子电压的有效值。

图2 软起动器主回路结构
2 皮带机用软起动器系统
2.1 系统原理
皮带机软起动器主要是取代直接起动方式,可以限制整个起动过程的电流,避免出现直接起动方式中的磁力起动器及上级配电开关跳闸,可减少磁力起动器烧毁、减速器、耦合器损坏等故障或事故。
根据皮带机工作原理,速度是其被控量,而软起动器中最终被控量是异步电动机的电压,需要构建起这两者的控制关系,同时要考虑到软起动器的电流限制这个优点。据此可知,软起动器的控制过程中出现对电压、电流的控制要求,其控制策略可以借鉴直流电动机调速系统控制思想[3],但是需要考虑异步电动机特点,对其进行修改。
2.2 系统实现
在软起动器中,三相交流调压器需要3组共6个晶闸管装置,其触发脉冲的控制尤为重要。控制中,同相两个晶闸管触发脉冲相差180°,3组触发脉冲对应脉冲相差120°。
系统采用转速和电流2个PI调节器,考虑到皮带软起动器和交流调压器的特点,转速和电流调节器都是单向限幅,即最终控制异步电动机的定子电压最低值为0,最大值为电网电压。如果需要皮带机反向运行,只需在控制主回路更换定子任意两相接线,其余控制同上。
3 系统建模与仿真
建立皮带软起动器的模型如图3所示。
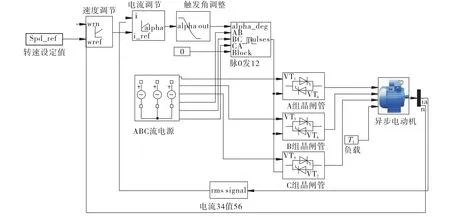
图3 双闭环皮带软起动器仿真模型
整个模型主要有速度调节器、电流调节器、触发角调整、脉冲发生器,晶闸管调压电流,异步电动机等模块构成。设定触发角调整模块主要是因为触发角度和交流调压器输出电压成反向关系。系统必须设定转速反馈和电流反馈,其中电流反馈是交流值,因为电流调节器是仿照直流电动机,需要计算单相电流的有效值,再作为反馈量。
仿真结果如图4所示,其中图4(a)为电机转速波形,设定转速为1 400 r/m,起动过程为0.5 s。图4(b)为定子A相电流波形,整个软起动器电流有效值限幅为60 A,从仿真波形来看,起动过程能达到限流目的。图4(c)为AB线电压波形,由于晶闸管在1个周期里存在切断和导通,线电压出现尖峰,存在谐波分量。仿真选用额定功率为2.2 kW的三相交流异步电动机。
4 系统设计
4.1 硬件设计
在高性能电机调速系统中,一般用DSP作为主控制器。本系统为晶闸管控制,对实时性的要求低于IGBT等全控型器件,考虑硬件成本,采用Intel 8xc196kc单片机[4]为主控处理器。

图4 双闭环控制皮带机仿真波形
8 xc196kc单片机含有高速输出口 HSO.0、HSO.2、HSO.2,可以作为脉冲发生器,通过软件设定在需要的时间发出高或低电平,形成脉冲。
8 xc196kc单片机中高速输入器HSI用于记录某一外部事件发生的时间,其事件基准由内部定时器提供,共可记录8种事件,有4根引脚可作高速输入脚。皮带软起动器系统中其可作为同步脉冲的输入。
系统反馈所需的电压电流信号可以通过采样电路来实现。8xc196kc内置的8通道高速A/D转换器,可满足应用需求,比其他类型的单片机使用方便。
4.2 软件设计
主程序主要有初始化、系统诊断、设定最大触发角、读取转速给定、PI调节器运算、脉冲同步运算、脉冲发生事件运算等部分。其中采样、PI调节器运算、脉冲触发时刻计算在中断服务程序中完成。
为了知晓单片机工作是否正常,在系统投入工作之前需要系统检测,主要包括检测CPU、内存、接口等功能是否正常工作等。
PI调节器数字化实现算法较多,常见的有位置式PI算法和增量式PI算法,为了运算方便,减少误差积累,采用增量式PI算法。
触发脉冲生成通过高速输出口 HSO实现。8xc196kc的高速输出口可以以设定好的时间产生触发信号。
HSI高速输入中断子程序用于检测同步信号,可选用线电压UAB作为同步信号,经同步变压器降至左右,再经正弦波/方波变换电路变成方波信号,将此信号接至微机的高速输入单元,令其在下降沿产生中断。
5 结论
将直流双闭环调速系统的控制思想引入到皮带机软起动器系统中,同时为符合皮带运输实际,限定电流和转速调节器为单向调节,可以实现对速度给定的最优时间响应。借助仿真说明了系统的可行性,最后给出皮带软起动器的系统设计方法。
[1] 李朝东.智能化软起动器在兴县亚军选煤厂的应用[J].选煤技术,2010(4):55-58.
[2] 刘 利,王 栋,等.异步电动机软起动器控制方式的研究[J].电气应用2010,29(16):36-40.
[3] 陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2003.
[4] 孙 佐.基于8XC196单片机的EPA和PTS实现伺服电机控制[J].组合机床与自动化加工技术,2005(5):67-69.
