适用于渤海湾的新型外转塔单点系泊方案研究
2013-01-11,,,,,
, ,,, ,
(1.中海油能源发展采油服务公司,天津 300457;2.中海油服油田生产事业部,天津 300459)
中海油的FPSO在渤海湾作业多年,系泊核心技术均来自于国外,出现过不少系泊故障。为了解决工程难题,打破国外单点系泊公司的垄断,扶持国内装备制造业的发展,中海油积极推进单点系泊技术国产化,广泛开展研究合作,最终确定了适用于中小型FPSO系泊的新型浅水外转塔单点系泊系统(以下称TUMSES系统)。本文以渤海某油田及其FPSO作业系统为基础数据,在上海交大深水试验池对该方案进行了试验论证。
1 系泊方案简介
1.1 渤海传统系泊方案
我国渤海海域水浅(20~40 m),FPSO系泊状况见图1。
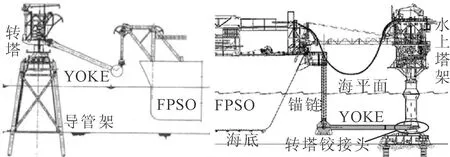
图1 渤海FPSO系泊情况示意
传统系泊方案多用水上塔架软钢臂(YOKE)单点系泊系统[2]。多点系泊适用于温和海况,抗风浪能力差,对水深也有较高要求,不适于渤海湾。另外,水深太浅导致几乎没有悬链线效应,所以内转塔单点系泊以及常规深水外转塔单点系泊方式无法在渤海湾应用。除此之外渤海有2处作业区还应用过图1右所示的锚链式水下YOKE系泊系统,渤海FPSO具体系泊情况参见表1。

表1 渤海服役FPSO基本情况
水上和水下YOKE单点系泊系统在渤海已使用多年。前者由导管架、水上塔架、YOKE、系泊臂、船艏支架等组成,该系统转塔力臂高所受环境力矩大、价格比较昂贵。后者由水下塔柱、水上塔架、水下YOKE、锚链系泊臂等组成,与前者相比,转塔在水下环境力矩较小,但锚链与船艏铰接处无万向节FPSO易出现“振颤”现象。实际运营中,水上YOKE单点系泊系统和锚链式水下YOKE系泊系统都出现过不少故障甚至较大事故,严重影响着海上的安全和生产。
1.2 新方案原理
FPSO为长宽比大的浮体,这种海洋结构物具有很强的方向性,在所有方向中,当船头迎风浪时船体所受载荷最小,响应最小,所以采用绕系泊点360°旋转的单点系泊方式能使浮体总是处于合外力最小的位置[3]。本方案正是基于此特点决定采用TUMSES单点系泊系统。
如图2所示,该装置水面上设置一个连接浮筒,连接浮筒通过机械连接装置与被系泊船艏部外伸转台结构连接,该浮筒与船舶之间通过轴承可实现周向回转,连接浮筒通过三根连接锚链与悬挂配重连接(周向等角度平分),配重块在系泊系统的运动中提供主要回复力。

图2 TUMSES系泊方案
悬挂配重下端以120°为间隔等角度沿周边散射布置三对组合系泊链,每对链相互之间夹角为5°,每根系泊链长为250 m。锚链一端与悬挂配重连接,另一端与系泊桩基连接。生产管线通过浮子和转台实现海底与船体的连接。
本系泊系统有别于传统塔架式单点系泊,它没有导管架,刚度特性比较柔,能有效减小系统所受的环境载荷。其理论依据如下:单点的系泊系统和立管系统是两个对立、矛盾的整体,必须综合考虑。系泊系统的作用类似弹簧,它“刚”,则系泊船只的位移小;它“柔”,则船的位移大。系泊船只的位移在很大程度上受控于立管系统,很显然,船只的位移大,势必给立管带来不利影响。
图1所示传统系泊方案出现问题的原因在于系统太刚,而图2所示的新型系泊系统的设计旨在满足立管运动范围的情况下尽量使系泊系统保持较好的弹性。
1.3 试验工况
TUMSES系统方案坐标见图3。

图3 TUMSES系泊方案坐标系统
试验工况包括百年一遇自存工况和一年一遇外输工况,FPSO和穿梭油船(Shuttle)的装载状态以及系泊系统链向的分布见表2和表3。
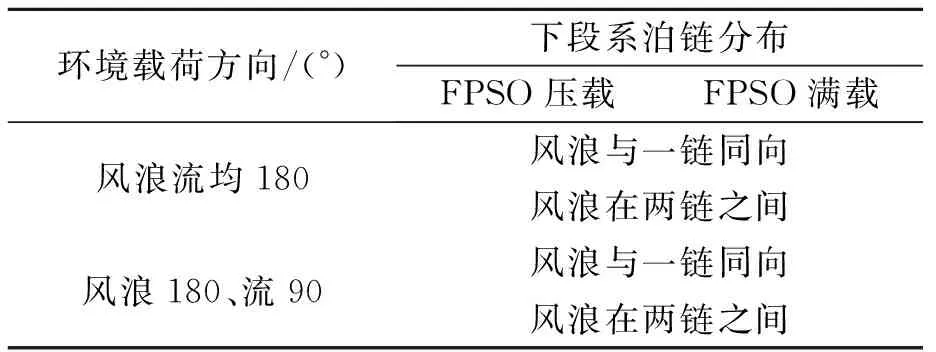
表2 百年一遇风浪条件下FPSO满载/压载工况

表3 FPSO满载(压载)/Shuttle压载(满载),外输工况
注:F压S满为FPSO压载Shuttle满载,F满S压为FPSO满载Shuttle压载。
其中,TUMSES系统方案中,关于“与一链同向”和“在两链之间”的描述见图4。

图4 系泊链布置与环境载荷相对方向
1.4 基本参数
基本参数见表4。

表4 基本参数
注:F:FPSO;S:Shuttle;H:有义波高;T:谱峰周期;V:风速;ν:流速;下标s:百年一遇;下标w:作业工况;t:吃水;Loa:总长;Lbp:垂线间长;B:型宽;D:型深
2 系泊分析
如图5所示,系泊力中波浪力包含波频与低频部分,波频即为一阶力部分,低频为二阶低频力部分,二阶力还包括和频力、倍频力以及定常力部分。随着低频慢漂运动,系泊系统会在二阶定常力作用下漂至动态平衡位置,然后在二阶低频慢漂力作用下围绕平衡位置做简谐振动,在低频慢漂的简谐运动基础上会伴有波频运动。

X1-平均漂移;X2-在X1上的低频慢漂;X3-在X2上的波频振荡。
1)把风力、流力和波浪定常力作为静力考虑,三者之和为平均力,所谓定常力即由一阶速度势产生的不随时间变化的力,可以理解为同频率的规则波耦合的结果[4],定常力横交于图5恢复力曲线上的一点,从该点向下作垂线,交于横坐标轴X1,即为平均漂移。
2)系泊船相对X1作低频慢漂运动X2,运动频率等于系泊系统的固有频率。
3)系泊船只相对于X2作波频运动X3,其运动频率为波浪频率。波频运动靠船舶自身提供恢复力,不考虑系泊系统的刚度。
4)最大系泊力发生在最大漂移状态Xt,即Xt=X1+X2+X3。此时船只在平均波浪力X1位置上做X2简谐低频振动漂至极限处,并且在低频慢漂X2的极限处同时伴有剧烈的X3波频运动,此时系泊系统有最大的系泊力。
由浮体运动理论可知,水平方向上(横荡、纵荡、艏摇)由于浮体无自身回复力,需依靠系泊系统提供回复力。将系泊系统看做弹簧,进行静力特性分析求得系泊的浮体在各方向上的刚度系数,即力——位移曲线,从而可根据浮体的运动确定系泊力如下。
FM=-KMX
(1)
式中:FM——系泊力;
KM——系泊系统刚度;
X——船只在水平面上的位移。
模型试验正是基于此原理,在主要需要测量的方向上模拟系泊系统的刚度,使得模型在静水试验中测得的某方向的刚度与理论趋于一致,则模型的运动和受力与实船相似,那么通过传感器测得的力和位移通过换算到实船则是准确的。
综上所述,系泊系统的设计应避免系统的固有频率与波浪的低频慢漂出现频率共振,因为一旦共振会造成运动幅度加大,由式(1)可知,系泊力会随之变大,这对系统不利。
3 模型试验
试验采样频率25 Hz,采样时间模拟实际时间3 h,模型值为30 min。采样点数不少于45 000点。试验内容包括静水试验和不规则波试验,静水试验能够获得模型不规则波试验的基本运动参数。不规则波试验时,从下达造波指令开始,到采样记录开始,需间隔2 min,以使正式试验采样时模型能够处于基本稳定的运动状态。
3.1 试验主要设备及其原理
1)深水造流系统。试验来流如图6所示。
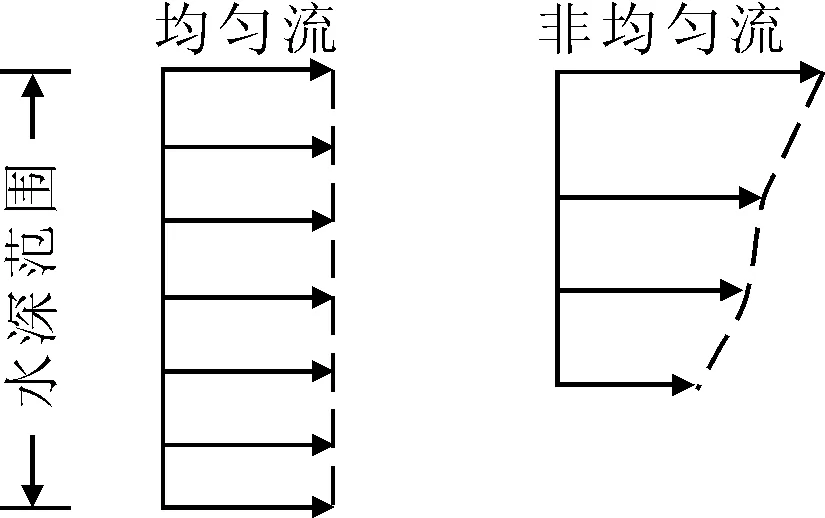
图6 剖面流
上海交通大学深水池配备有整体池外循环的深水造流系统,可在0~10 m的水深范围内产生具有各种流速剖面的深水流场以模拟深海海流,该系统能够使试验区域的流场均匀性满足深水试验的要求,即流场在横向方向上流速分布足够均匀[5]。试验室水池中心试验区的流由造流泵控制,共6台泵,根据剖面形式和流速大小进行垂向的分层控制,流速可以通过造流泵的功率进行调节。试验时启动需要控制的造流泵,输入初始参数,开始造流,流到达试验区1分钟左右流场稳定后,中心试验区的多普勒流速仪开始采集数据,然后进行数据分析,数据结果反馈到电机的控制屏并相应对其控制参数进行调节,再次造流,然后再采集数据,再分析,直至调节的流场符合试验的要求,本试验以模拟一年一遇(外输)和百年一遇的表层流速为准,调试结果误差在3%以内,效果良好。
2)造波系统。造波中的波谱分析,是由时域的波谱经快速傅里叶变换变成频域的能量谱。试验需要调节控制参数直至水池造波的谱峰周期、有义波高与目标波谱逼近。
(2)

(3)
(4)
式中:ω——波频;
f(t)——时域函数;
F(ω)——频域函数;
S(ω)——谱密度函数;
A——规则波振幅;
ζ——实际不规则波垂向坐标。
式(2)、(3)、(4)即为水池造波的理论依据。如图7所示,试验时不规则波是根据给定海域的有义波高、周期及波谱进行模拟。如式(4),时间序列波浪经过频域变换,可以把不规则波分析成频率不同的规则波叠加[6]。经过式(2)的变换,把波浪从时间函数变化为静态的频率函数。造波时各频率下波浪的振幅由公式(3)表达。

图7 波浪中的时域与频域关系
本系统为L型多单元蛇形造波机。造波机对岸装有消波滩,以吸收波浪能量,避免反射波造成的干扰。造波机可产生二维长峰波和三维短峰波。试验时,在试验区布置3个浪高仪,根据目标波谱和编制计算机控制程序,输入初始控制参数控制每块摇板运动的频率和幅度,进行造波,波浪稳定后,开始采集数据,进行波谱分析,并和目标波谱进行比较,修正后的参数反馈到造波机电机控制程序进行造波,如此循环直至试验统计的有义波高和谱峰周期满足试验要求。本次试验的波谱参数误差在2%以内,效果较好。
3)造风系统。轴流式风机系统固定在拖车下,由计算机实时控制,可产生定常和非定常风谱,风向可根据需要任意改变。轴流风机由变频器控制电机转速,通过给定的风谱编制计算机控制程序改变变频器输出频率控制风机的转速来改变风速[7]。
风的模拟,主要考察其对FPSO的作用力,上层建筑不一定模拟得很精准,因为受风面积不一定准确,若按照风速模拟结果有可能失真。所以,试验中是测量风载荷,根据实船受风面积计算出实船所受平均风力换算到模型,相应进行模型平均风力测试,此时的平均风力即为试验平均风力,然后按照平均风力模拟脉动风谱。
4)大面积可升降假底。试验池的假底可供水深在0~10 m间调节,根据本模型缩尺比1∶40假底升到距水面0.643 m。
5)非接触式光学6自由度运动测量系统。如图8所示,本系统为丹麦的非接触式运动测量器,至少4个光感球装在船上,接收器安装在拖车上,至少2个传感器固定在水池岸边,接收随船运动的光感球的红外感应,当运动系统采零后,本系统用于测量模型在风浪流作用下6自由度的运动,其中纵荡、横荡和垂荡的测量精度为1 mm,纵摇、横摇和艏摇的测量精度为0.1°。

图8 运动测量系统
3.2 试验仪器及测量参数
试验仪器及测量参数见表5。
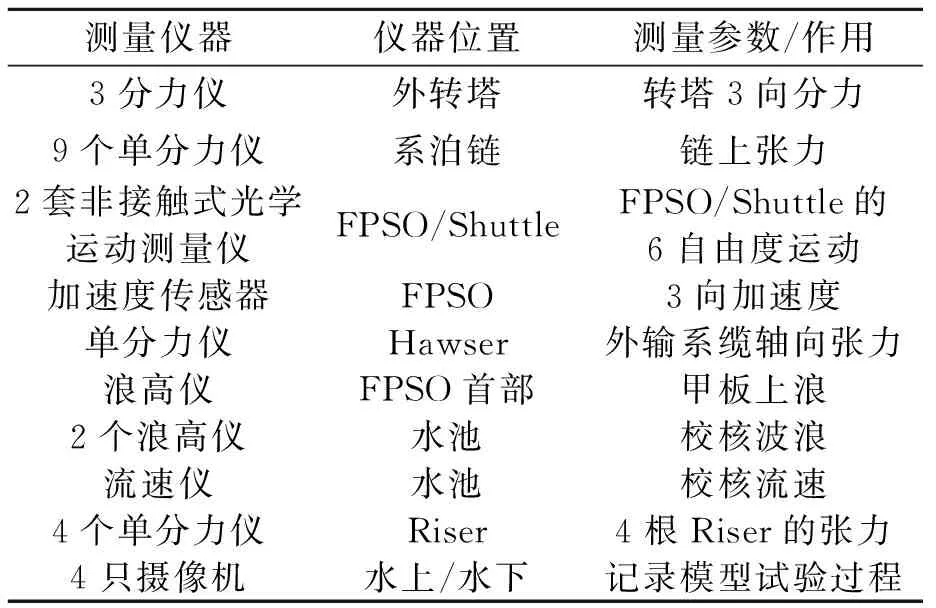
表5 试验主要仪器
3.3 参数模拟、调节及标定
3.3.1 刚度模拟
锚泊线刚度模拟普遍采用弹簧,但应注意两点:①模型系泊链加上弹簧后长度要与实物锚泊线的长度几何相似;②弹簧在试验范围内受力后的变形伸长必须在弹性恢复的范围之内,不允许出现永久变形。试验中立管模拟需满足形状的几何相似及拉伸刚度的相似。
3.3.2 预张力调节
刚度是由结构水上和水下的固有特性决定的,本系统可以调节锚链的长度和固锚点来微调系统刚度。首先,传感器清零,即把锚链放松调节传感器使显示数据为零。然后,保证配重块基本在船艏的正下方没有横向力作用,由于上段3根链两端的连接是固定不可调节的,故预张力的改变是调节下段6根链的固锚点和链长。
3.3.3 仪器标定
传感器标定都是通过电信号转化实现的。例如测力传感器标定是用挂砝码的方法确定拉力或压力与输出电压方向和数据的关系。需注意的是,运动测量系统仪器精密,只要稍微触碰或受到大地震动的影响,都会使测量误差增大。因此,标定好以后,不能触碰感应镜头,周围最好不要有人走动,对于本系统,用L型架杆标定法。L形光感球架球间距是固定的,利用测得的L形架光感球间距与实际L形架光感球间距的比值确定运动的缩尺比。标定时,手持T形架在L形架的上方缓慢移动,移动范围尽可能覆盖所能达到的测量区域,即船运动的范围,直至标定成功。
4 试验结果
模型的不规则波试验包括外输(一年一遇)工况和风暴自存(百年一遇)工况,表6和表7给出了外输和风暴自存工况的计算结果的极值,包括下段6根系泊链在各环境工况中的最大受力以及FPSO在水平方向的最大运动幅度(本文旨在考查系泊系统,而与系泊系统有关的主要船舶运动为水平面运动,即纵荡、横荡和艏摇)。
试验过程中水下摄像机分别从不同角度始终监测着配重块的运动,结果表明,配重块在运动中始终没有碰撞船艏底部,运动状态良好。
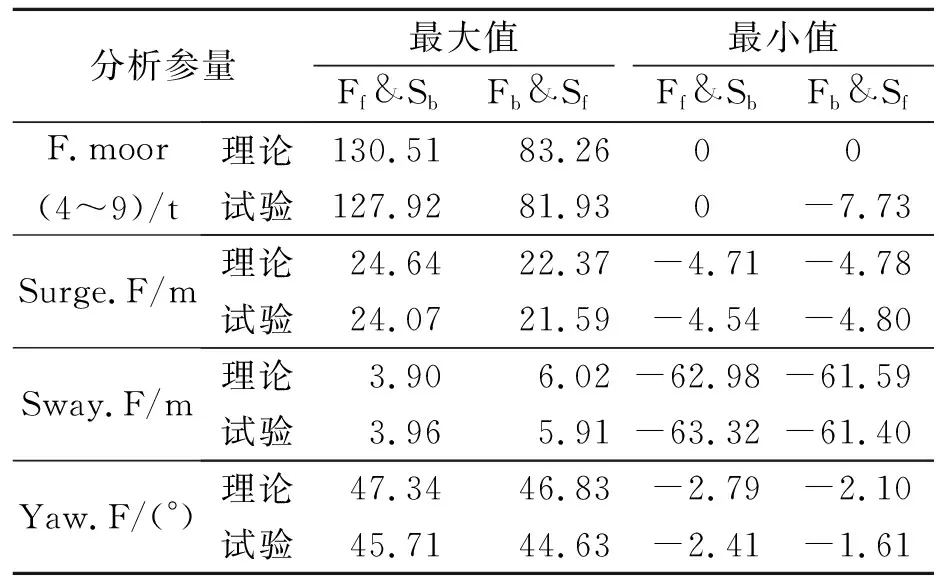
表6 FPSO满载(压载),shuttle压载(满载),外输工况
注:(1)F.moor1~F.moor3为上段系泊链力,F.moor4~F.moor9为下段系泊链力,F表示PFSO,下同;(2)Ff&Sb:FPSO满载Shuttle压载;Fb&Sf:FPSO压载Shuttle满载;(3)FPSO的6个自由度运动以图3所示的船舶在静水中的初始重心处坐标作为参考。

表7 百年一遇时,FPSO满载(压载)工况
为了检验TUMSES方案试验结果的实用性,引入另一种相同FPSO相同作业海域的系泊系统的研究结果作为对比,采用聚酯纤维缆的多点系泊技术,方案简图见图9。

图9 采用聚酯纤维缆的多点系泊
聚酯纤维缆是一种较为新型的材料,相比于锚链具有较低的刚度系数和较大的破断拉力。用聚酯纤维缆代替系泊锚链,能够降低配重链预张力,改善系泊系统的受力,满足FPSO的定位要求。图9所示的两种系泊方案在满足与本文环境载荷和FPSO等相同的条件下,百年一遇工况时有:3组6缆系统,环境载荷90°时,锚缆有最大系泊力,其值为5 767 kN;3组9缆系统,环境载荷90°时,锚缆有最大系泊力,其值为4 187 kN。可见,相同条件下,TUMSES单点系泊系统有着更为良好的受力状况(多点系泊对FPSO的运动约束比较大,故此处不进行水平面运动位移的比较)。
5 结论
从试验结果可知,实验数据基本上在理论计算的范围内,结果比较一致,个别数据的偏差,应该是试验中环境和人为影响的结果,这说明设计本身是正确的。试验结果表明:外输工况中,FPSO满载Shuttle压载(F满S压)比FPSO压载Shuttle满载(F压S满)锚链受力更大,其最大值为1 279.2 kN,与风暴自存相比,其值相对是比较小的,系泊系统是安全的,而FPSO的水平面运动也满足相同的规律,即F满S压比F压S满运动幅度大。值得一提的是,在YOKE系泊系统中,受力满足相同规律,而FPSO的水平面运动则刚好相反,此差异可能是系泊系统的刚度不同造成的。在百年一遇工况中,FPSO满载比压载系泊链受力更大,最大瞬时值为3 636.2 kN,与上文聚酯纤维缆系泊张力相比,其值较小,在工程中是可接受的。相应的FPSO的水平面运动也是满载比压载更大,百年一遇的TUMSES系统特性与YOKE系统是相同的。理论和试验都表明:TUMSES系统受力较小,能较好地满足工程要求。值得注意的是,由于该系统系泊链布置得比较长,柔性较大,故运动幅度较大,尤其在外输作业时由于系泊系统的质量更大,导致其水平面运动幅度比风暴自存更大。
渤海海域已投入开发的油田所采用的系泊形式有水上塔式YOKE和锚链式水下YOKE系统。这两种系泊形式的系泊机理是相同的,造价都为几千万美元,系统刚性大,都缺少弹性位移的空间,在极浅水系泊中存在很大的局限性。而本文所研究的TUMSES单点系泊系统刚性小,系统受力良好,且可根据水深调节锚链的分布和配重块的大小,能满足渤海水域不同水深要求,同时免去了水上系泊架,节约了成本。当然,该方案缺点很明显,即系统柔性较大,导致FPSO运动幅度加大,考验着立管系统的设计。如果能够进一步研究,更好地统筹系统的刚度和立管的运动,则能够早日实现该方案的工程应用。要强调的是:这是首次在渤海湾应用外转塔型式系泊,且方案为国内设计,所以,TUMSES系统方案及其系泊试验对系泊系统的国产化有着重要的意义。
[1] 肖龙飞,杨建民,李 欣.浅水区FPSO波频运动与触底时域分析[J].中国海洋平台,2009,24(2):33-36.
[2] 王春升.渤海曹妃甸11/渤中25-1油田FPSO新型单点介绍[J].中国造船,2006,47(S):9-13.
[3] 陈 光.FPSO软刚臂系泊系统运动分析及减振研究[D].大连:大连理工大学,2012.
[4] 张相木,李维扬.单点系泊系统在风浪流联合作用下的运动和系泊载荷[J].海洋工程,1988,6(3):18-20.
[5] LU HAINING ,YANG JIANMIN,PENG TAO.Characteristics of current generation in deepwater offshore basin[C]∥Proceeding of the 25th International Conference on offshore Mechanics and Arctic Engineering.2006.
[6] 杨建民,肖龙飞,葛春花.船舶与海洋工程环境载荷[M].上海:上海交通大学出版社,2008.
[7] 杨建民.海洋工程水动力学试验研究[M].上海:上海交通大学出版社,2008.
