仿人机器人在残障人生活起居中的应用分析
2012-11-16李剑李辉
李剑,李辉
1.国家康复辅具研究中心 科研管理部,北京 100176;2.中国矿业大学(北京) 力学与建筑工程学院,北京100083
仿人机器人在残障人生活起居中的应用分析
李剑1,李辉2
1.国家康复辅具研究中心 科研管理部,北京 100176;2.中国矿业大学(北京) 力学与建筑工程学院,北京100083
本文在仿人机器人与残障人的基础上,进一步从应用需求、应用可行性、应用范围、应用现状、应用前景、发展趋势等方面,分析研究了仿人机器人在残障人生活起居中的应用可能性、必要性、科学性及未来发展趋势。
仿人机器人;残障人;机器人;康复训练;仿生设计
0 前言
残障人是社会的弱势群体,其日常生活起居直接影响着生存质量[1]。随着机器人领域的进一步拓展和应用推广以及对人的极大关注,把先进的仿人机器人技术应用于残障人生活起居已不再是一种空想和妄想。仿真机器人是现代科学技术服务于人类的实验性推广,也是顺应时代需求的大胆创新与探索。仿人机器人具有类人的形态,它不仅可以辅助或替代残障者完成日常生活中的相关工作,而且通过高度仿真的多感官情感及精神的交流,极大地开发了残障人的精神世界,这对于康复训练及生活、生存质量的提高是极为有利的。
1 仿人机器人
1.1 仿人机器人的概念
仿人机器人的概念最早由日本早稻田大学的加藤一郎教授所提出,他指出,仿人机器人应同时或分别具备3个条件:① 具备脑、手、脚3要素的个体;② 具有非接触(用眼、耳接受远方信息)和接触的传感器;③ 具有平衡觉传感器和固有觉传感器[2]。著名仿人机器人研究学者Kajita对仿人机器人进行了更加简单的定义,即仿人机器人就是外形像人的机器人。
综合来说,仿人机器人是对于人体形态、行动、思维以及其他非物质方面的模仿与设计,它同时或分别具备人的形态,是仿生设计在机器人领域的应用与开发。仿人机器人集机械、电子、计算机、材料、传感器、控制技术等多门科学于一体,具有真正意义上的“人”的外形和特征,代表着一个国家的科技发展水平和实力[3]。
1.2 仿人机器人的特点
与传统机器人(工业机械臂、智能轮椅、智能假肢、爬行机器人等)相比,仿人机器人在外观上更接近于人,具有极大的亲和力、感染力及行动灵活性与多样性,更易于人机信息的交流与传递[4]。仿人机器人是高科技与高情感相结合的产物,不仅在功能上实现了智能化,而且试图通过思维和外在形态上的高度仿真来实现更高层次的人工智能,如人工思维、人工情感等仿真机器人与传统机器人的比较,见表1。

表1 仿人机器人与传统机器人比较
1.3 仿人机器人的作用与意义
仿生机器人可以代替人类完成部分工作或任务,并可以在很多方面扩展人类的能力。在助老、助残、养老、服务、医疗、娱乐等多个领域,仿生机器人都具有极大的应用潜力[5]。
仿人机器人集现代科学技术与人工智能为一体,通过类人的形态、四肢或思维来实现相关的人类活动,极大的开发和解放了人类的精神情感世界。同时,仿人机器人对于人体的研究也进一步促进了人类对于自身的了解。仿人机器人的研究意义是重大的,它不仅是人创造物的过程,而且是物实现于“人”的过程。仿人机器人的意见,见图1。

图1 仿人机器人的意义
2 残障人
2.1 残障人的概念
残障者是社会上具有特殊困难的弱势群体,包括老年人、残疾人、伤病人。根据ISO和IEC的定义,“残障”是指人体机能或组织的问题,如功能异常或丧失,这可能是暂时性的,如由于受伤引起的或永久性的,可能随着时间的推移而有所变化,特别是年老引起的功能退化更加明显[6]。
2.2 残障人的特点
由于相关生理功能的残缺或衰退,残障者在心理和生理上具有很大的特殊性(表2)。同时,由于残障部位、残障程度以及个人文化背景、性格特点、所处环境等方面的差异,残障者的需求具有极大的个体差异性[7-8]。

表2 残障人生理、心理特点
2.3 残障人的生活起居
残障人的生活起居不同与正常人,无论是活动范围,还是活动频率和活动强度,都明显小于正常人。很多看似简单的动作或工作,对于残障人来说都是一种极大的挑战和困难[9]。
3 仿人机器人在残障人生活起居中的应用分析
3.1 应用需求分析
根据2006年第2次全国残疾人抽样普查的结果,我国残疾人总数为8296万(图2左),占总人口的6.34%。其中,需要康复服务的残疾人数占残疾人总数的72.28%,正在等待康复服务的残疾人占残疾人总数53.28%[10]。同时,随着老龄化社会的到来(如图2右)以及各种伤病、自然灾害的发生,残障人的比例和数量在逐年上升。面对如此庞大的残障人群,如何使他们更好的生活以及如何满足他们的衣、食、住、用、行等生活需求,是值的我们长久思考的问题。同时,2011年是“十二五”开局之年,根据国家相关政策,民生问题将成为“十二五”的主题和要点,社会养老、家庭养老等问题相继成为社会关注的焦点。
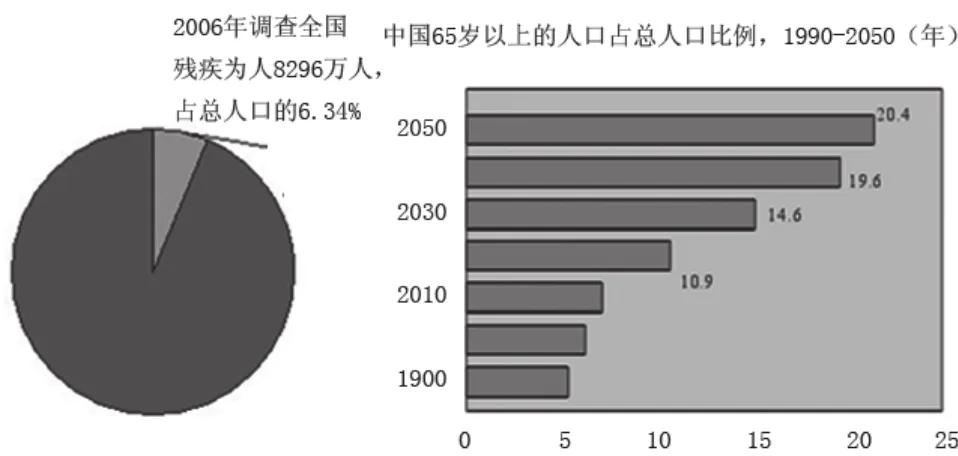
图2 2006年残疾人比例示意(左);中国人口老龄化趋势(右)
3.2 应用可行性分析
随着科学技术的进步和人工智能的发展,仿人机器人不仅可以具有更加逼真的仿人形态,而且在思维和意识上可以最大程度的模仿人。目前,哈尔滨工业大学、北京理工大学、北京航空航天大学、国防科技大学等高校已基本掌握了机构、控制、传感器、电源、语音对话、面部识别、环境识别、障碍检测等多方面的关键性技术,并具备了进行更深层次研究的能力。图3是北京理工大学研发的“汇童”机器人,它从2002年推出以来已更新了3代。最新的“汇童GDSC”具有28个自由度,集机构、控制、电源、传感器等于一体,具有力觉、平衡觉、语音对话、遥感操作等功能,可实现无外接电缆的独立行走,并能完成太极拳等复杂动作表演。仿人机器人在残障者生活领域中的应用研究极大的促进了现代机器人技术的发展和创新,为其他领域类似问题的解决提供了参考。

图3 “汇童”机器人
3.3 应用范围分析
仿人机器人在残障人生活领域中的应用范围非常广泛。它不仅涉及残障人的基本需求(衣、食、住、用、行),而且在护理服务、康复训练、娱乐休闲、安全提示及灾害预警等方面也可以为残障人提供更多的便利和安全。
在护理服务方面,仿人机器不仅可以辅助残障人或护理人员完成一系列的基本工作,而且可以通过多感官的信息交流实现高质量的情感陪护。图4由日本早稻田大学推出的情感机器人KOBIAN,它可以同时利用表情和动作与人进行全面的情绪互动[11]。

图4 情感机器人KOBIAN
在康复训练方面,仿人机器人通过科学的程序控制和严格的生理监测实现相关生理功能的恢复或重建。图5是康复指导师“泰佐”,它看起来更像一个笨拙可爱的雪人,但内部的26个关节足以让它成为瑜伽师傅。“泰佐”懂得30个训练动作,能带领病人伸展手臂、弯腰碰触脚趾等。

图5 康复指导师“泰佐”
在休闲娱乐方面,仿人机器人寓教于乐,将相关的康复训练或文化知识与游戏等休闲方式糅合在一起,使残障者在娱乐的同时得到了训练,学得了知识。
在安全提示方面,仿人机器人可以实时监测残障人的活动状况,并在其发生意外或危险时及时发出求救信息。图6是由台湾交大研究团队研发的护理机器人ROLA,其可以追踪监测主人发生跌倒等意外,在第一时间赶到主人身旁的同时,自动透过无线网络通讯系统或3G手机,发出求救讯号给在外工作的家人。
图6 护理机器人ROLA
在灾害预警方面,仿人机器人可实时检测残障人室内的温度、湿度、烟雾浓度、空气成分、可疑物体等,以预防火灾、煤气泄漏、恐怖袭击等灾害的发生。图7是Tmsuk公司的警卫机器人MJRO,它可以对可疑物体进行监测、检查并进行安全转移。

图7 警卫机器人MJRO
3.4 应用现状分析
3.4.1 国外现状
在国外,仿人机器人在残障人生活领域中的应用研究起步较早,尤其是日本、德国、美国等国家[12]。国外的相关研究主要侧重在以下3个方面:
辅助操作仿人机器人,有德国的Care-o-bot、日本的Twendy-one、韩国的steward robot等。Care-o-bot系列机器人由德国弗劳恩霍夫制造技术和自动化研究所(Fraunhofer IPA)于1998年推出,它的设计目标是帮助老年人和行动不便者进行日常的生活。Twendy-one由日本早稻田大学推出,具有全向移动底盘、大载荷的双操作臂与机械手、可弯曲的身体、双目视觉系统,能完成取物、操作冰箱、烤面包机、烤面包、开饮料、拾取地面物品、将残疾人从床上转移至轮椅上等多种功能(图8左)。Steward robot由韩国高科技研究院于2008年推出,具有递送物品、控制家电、自主学习(对陌生物品、行为进行记忆学习)、情感交互等功能(图8右)。

图8 Twendy-one(左);Stewradrobot(右)
导航助行仿人机器人,有韩国的DO-U-ME Nursing robot及美国的Pearl等。DO-U-ME Nursing robot由韩国高科技研究院推出,具有室内导航、助行、避障、身体支撑、人脸识别、声音识别、声源定位等功能。Pearl由美国Carnegie Mellon University推出,具有室内导航、带路、远程医疗、老人日程规划、提醒、老人生活数据收集、社交活动等功能[13]。
抱起转移仿人机器人,有日本的RI-MAN、RI-BA等。RI-MAN和RI-BA由日本理化研究所生命技术控制研究中心研制。RI-MAN不但能理解人们的声音指示,甚至还能根据指示把被看护人抱起来,协助医生进行护理工作(图9左)。RI-BA是RI-MAN的加强版,具有更大承抱能力和更安全的稳定结构(图9右)。

图10 RI-MAN(左) ; RI-BA(右)
3.4.2 国内现状
国内在此方面的研究主要集中在辅助操作和护理陪护两方面。近几年,在国家“863”等项目的资助下,我国已取得了一些成果,但在机器人行动自主性、操作准确与可靠性、外观设计、人机交互等方面还存在着很多问题。“十一五”期间,由哈尔滨工业大学机器人研究所研制的助老陪护机器人(图10上)具有提醒老人吃药、双手端盘、开橱门、取药等功能。2010年世博会上,上海电器科学研究院的机器人(图10下),它具有6自由度双机械臂,具有语言识别、人脸和图像识别等人机交互功能,能完成取物,开门、倒水、自主载人运行,遥控家庭电器设备以及实时监测(门窗入侵、火灾烟雾、煤气泄漏、水表、电表、煤气表反映等环境信息)等工作。

图10 哈工大助老陪护机器人(上);上海电器科学研究院的监控机器人和送菜机器人(下)
3.5 应用前景分析
截至2009年底,我国有各类养老机构38060个,随着老龄化社会的到来,需要大量的护理人员。仿人机器人在残障人生活领域中的应用不仅减少了护理人员的数量,而且在很大程度上减轻了工作强度。面对当前专业护理人员紧缺,护理水平有待提高的现实,将仿人机器人应用于福利院、养老院等公共机构具有巨大的前景[14]。同时,随着人们经济条件的改善和生产成本的降低,个人家庭的应用前景也不容忽视。
3.6 发展趋势分析
3.6.1 全方位的安全保障
安全是第一位的,它关系残障者的身心健康。仿人机器人的安全保障依赖于各项技术的可靠性和具体设计的合理性,只有深入研究机器人相关技术,并从工业设计、机械设计、人机工程学、心理学等多个角度综合考虑才能保证仿人机器人在残障者生活领域中的安全应用[15]。
3.6.2 人性化信息交互
由于残障人生理机能的退化或损伤,他们在视觉、听觉、触觉及认知学习等方面都可能存在一些问题。因此,针对残障者的个体差异性,我们必须提供更加人性化的人机信息交流界面和模式,并根据实际需要进行视觉、听觉、触觉、嗅觉、味觉等多感官信息交流渠道的创建[16]。
3.6.3 功能集成与模块化
由于残障者需求的个体化和特殊性,无法用以往的通用设备来进行个体服务。这就需要采用集成与模块的方式来实现,这不仅利于个体需求的满足,而且提高了仿人机器人的研发速度,降低了研发成本,扩大了应用范围。
3.6.4 市场产品化
目前,我们所做的大多数工作都属于实验性研究,缺乏真正的市场化。因此,为了使仿人机器人真正的应用于残障人生活领域,市场产品化是唯一的途径,也是最难解决的问题。在未来的日子里,如何实现真正意义上的仿人机器人产业化、实用化将是我们探索的重点。
3.6.5 非物质化
21世纪是信息的时代,也是非物质的时代,仿人机器人不再仅限于人体形态的简单模仿和设计,而是向着更高层次的非物质方面发展。随着人们对于精神情感的关注[17],适用于残障人生活领域的仿人机器人必然向着思维、情感、精神等非物质方面扩展。
4 小结
仿人机器人在残障者生活起居中的应用是必要的,也是可行的。面对越来越多的残障人,大力发展服务于残障人的仿人机器人任重而道远。这不仅是实际问题的解决,而且是科学技术的进一步深入。
[1] 沈晓军,张晓玉.我国康复辅具发展概况[J].中国医疗设备, 2009,24(12):1-4.
[2] 梶田秀司.仿人机器人[M].北京:清华大学出版社,2007.
[3] 百度百科.仿人机器人[EB OL].2010-08-06/2011-08-08. http://baike.baidu.com/view/630520.htm.
[4] 李辛沫,李建春,工大承.仿生设计在越野摩托车产品开发中的应用[J].机电产品开发与创新.2008,21(2):71-73.
[5] 王田苗,孟偲,裴葆青,等.仿壁虎机器人研究综述[J].机器人,2007,29(3):290-297.
[6] International Organization for Standardization.ISO/IEC Guide 76: 2008. Development of service standards—Recommendations for addressing consumer issues[S].International Organization for Standardization,2008.
[7] 徐静,郑俭.沟通辅具个体化设计通用评估支持体系的建构[J].中国康复理论与实践.2007,13(4):337-339.
[8] 刘晓琦.残疾人心理特征与无障碍设计[J].四川建筑,2010,30(4):28-30.
[9] Yada Chavalkul,Andrew Saxon,Robert N Jerrard.Combining 2D and 3D Design for Novel Packaging for Older People[J]. International Journal of Design.2011,5(1)43-58.
[10] 第二次全国残疾人抽样调查办公室.第二次全国残疾人抽样调查资料[M].北京:中国统计出版社,2007.
[11]张秀丽,郑浩峻,陈恳,等.机器人仿生学研究综述[J].机器人,2002,24(2):188-192.
[12] 吉爱红,戴振东,周来水.仿生机器人的研究进展[J].机器人,2005,27(3):284-288.
[13]许宏岩,付宜利,王树国,等.仿生机器人的研究[J].机器人,2004,26(3):283-288.
[14] Anna Essén,Britt Östlund.Laggards as Innovators? Old Users as Designers of New Services & Service Systems[J].International Journal of Design,2011,5(3):89-98.
[15] 黄晓光,叶振合,郑颖.残疾人辅具产品安全性设计研究[J].包装工程,2010,32(16):16-18.
[16] 文小辉,刘强,孙弘进,等.多感官线索整合的理论模型[J].心理科学进展,2009,17(4):659-66.
[17] 李剑.非物质设计之情感设计[A].2009国际工业设计研讨会暨第十四届全国工业设计学术年会.2009年国际工业设计研讨会论文集[C].顺德: 2009国际工业设计研讨会暨第十四届全国工业设计学术年会,2010.
Analysis of Humanoid Robot which Uses in Disabled People's Living
LI Jian1, LI Hui2
1.National Research Center for Rehabilitation Technical Aids, Beijing 100176, China; 2.China University of Mining & Technology (Beijing), Beijing 100083, China
On the basis of concept and characteristics of humanoid robot and disabled people, further from application requirements, application feasibility, application scope, application status, application prospects, application trends, etc. this article analyzed and researched the application of humanoid robot in the daily life of disabled people. All of this is not only showing the possibilities, the necessity and scientific of application of humanoid robot uses in the daily life of disabled people, but also provides a theoretical basis and research base for further research and specific applications design to service robots.
humanoid robot; disabled people; living; robot; rehabilitation training; sunulate desugn
R687.3
B
10.3969/j.issn.1674-1633.2012.02.017
1674-1633(2012)02-0057-05
2011-08-08
2012-01-17
国家科技支撑计划(课题编号:2009BAI71B01)。
作者邮箱:redbomb628@163.com
