基于摇臂钻床组态软件模拟平台的设计
2012-10-30刘兴华苏盈盈葛继科杨满仁
刘兴华 苏盈盈 葛继科 杨满仁
(1.重庆科技学院,重庆 401331;2.成都瑞鑫石油技术咨询有限公司, 成都 610516)
基于摇臂钻床组态软件模拟平台的设计
刘兴华1苏盈盈1葛继科1杨满仁2
(1.重庆科技学院,重庆 401331;2.成都瑞鑫石油技术咨询有限公司, 成都 610516)
利用SIMATIC WinCC组态软件,设计了Z3050摇臂钻床平台,模拟出机床运行过程的各种活动部件位置与机床内部各节点控制电路输入输出的电信号逻辑信息。从外在机械硬件结构运动到内在电气逻辑控制,逐一进行仿真、调试、运行,效果理想,克服了目前摇臂钻床继电控制电路模拟实物平台中,其本身不能形象地模拟机床运行过程中实际各个部件的运行情况等缺点,从而准确地复现机床上各部件的空间位置信息,为维修电工实训提供了一定的拓展空间。
Z3050;模拟;WinCC
在各种钻床中,摇臂钻床操作方便、灵活,使用范围广,是一种孔加工设备,可以用来进行钻孔、扩孔、铰孔、攻丝及修刮端面等多种形式的加工。特别适用于带有多孔大型工件的孔加工。
针对Z3050摇臂钻床继电控制电路模拟实物平台不能模拟机床运行过程中实际各个运动部件的运行情况,而且平台上行程开关的人工扳动不能准确地复现摇臂钻床上各部件的空间位置信息和各种液压装置推动产生的结构部件放松与夹紧信息。利用组态软件图形化界面编程模拟可以模拟出机床运行过程的各种机床本身活动部件位置及各节点控制电路输入输出的电信号信息,使整个机床实物本身和控制电路有机地结合在一起,如同一个真正的机床展现。
Z3050摇臂钻床模拟板平台存在较多缺点,如需要人工手动设置较多,频繁的设故与排故后易引起节点的故障,影响机床的使用寿命,而且模拟板上存在能危及人身安全的三相380/220V电压等等。因此,基于组态软件的摇臂钻床模拟平台设计研究就显得尤为重要了。
1 Z3050摇臂钻床原理及电路分析
Z3050摇臂钻床外观结构如图1所示。摇臂可绕立柱回转和升降,主轴可方便地在水平面上调整位置,使刀具对准被加工孔轴心,而工件则固定不动。因此,便于加工大而重的工件上的孔。

图1 Z3050外观结构
主轴箱可在摇臂上左右移动,并随摇臂绕立柱回转±180°。摇臂还可沿外柱上下升降,以适应加工不同高度的工件。较小的工件可安装在工作台上,较大的工件可直接放在机床底座或地面上。
当进行加工时,由夹紧装置将主轴箱紧固在摇臂导轨上,外立柱紧固在内立柱上,摇臂紧固在外立柱上,然后进行钻削加工。钻削加工时,钻头一边进行旋转切削,一边进行纵向进给。
Z3050摇臂钻床电气控制原理如图2所示,从主电路和控制电路两方面着手进行分析。
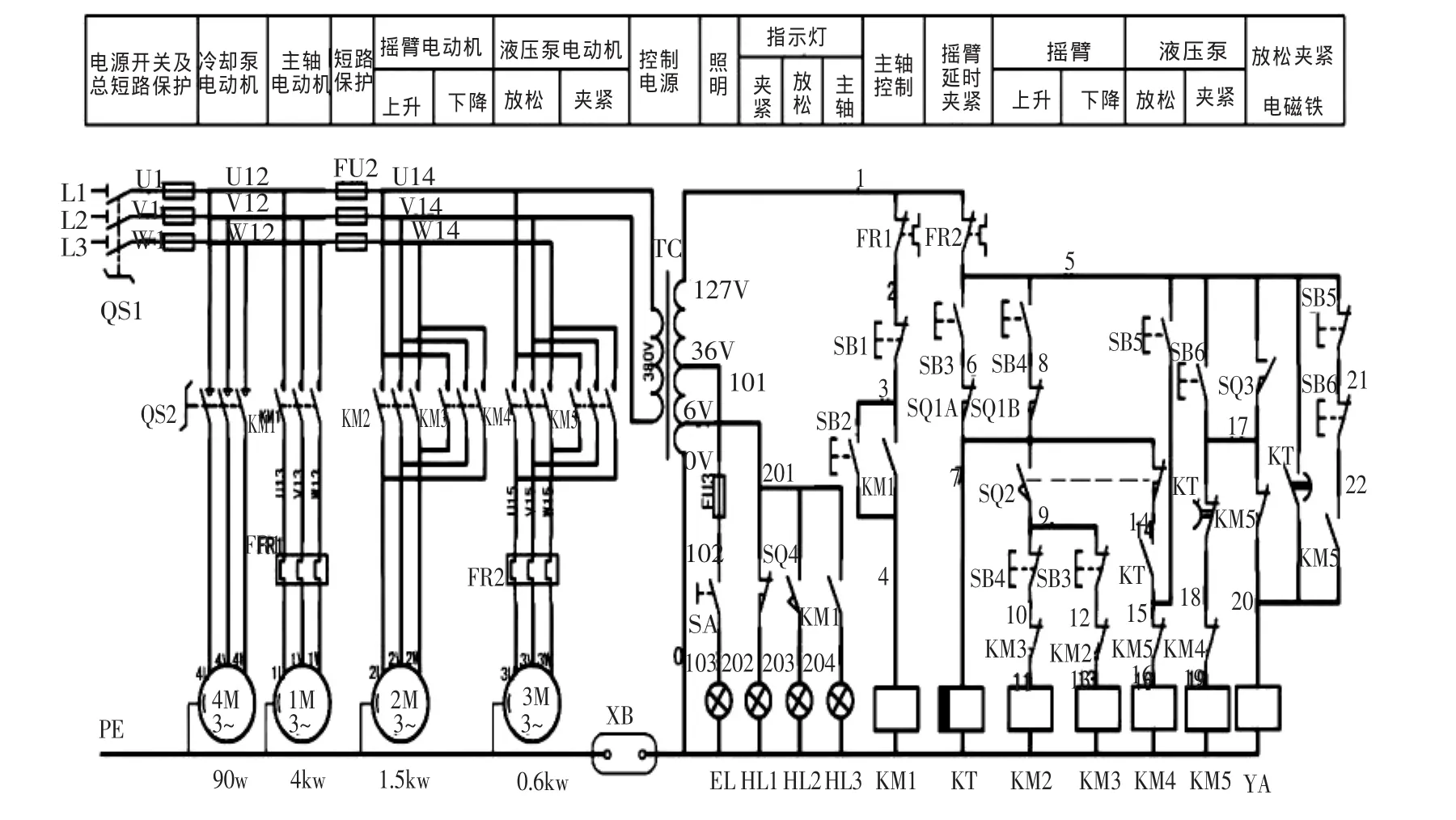
图2 Z3050电气控制原理图
主电路分析:M1为主轴电动机,由接触器KM1控制。主轴的正反转是另一套由主轴电动机拖动齿轮泵送出压力油的液压系统,经“主轴变速、正反转及空档”操作手柄来获得的。M1由热继电器FR1作过载保护。M2为摇臂升降电动机,正反转接触器KM2、KM3控制实现正、反转,因摇臂移动是短时的,不用设过载保护,但与摇臂的放松和夹紧之间有一定的配合关系,这由控制电路去保证。M3为液压泵电动机,由接触器KM4、KM5控制实现正、反转,设有热继电器FR2作过载保护。M4为冷却泵电动机,由开关QS2控制起动、停止。三相电源由低压断路器QS1控制。
控制电路分析:
(1)主轴电动机控制
由按钮SB1、SB2与接触器KM1构成主轴电动机起动-停止控制电路,M1启动后,指示灯HL3亮,表示主轴电动机在旋转。
(2)摇臂升降及放松、夹紧控制
主轴箱转盘上的两个按钮SB5、SB6分别为主轴箱及立柱松开按钮和夹紧按钮。摇臂钻床工作时摇臂应夹紧在外立柱上,发出摇臂移动信号后,须先松开夹紧装置,当摇臂移动到位后,夹紧装置再将摇臂夹紧。本电路能自动完成这一过程。
2 摇臂钻床模拟平台HMI设计
WinCC支持直接引入 AutoCAD图纸和Windows元文件,可在16个不同的层面上作图[4-5]。首先创建变量,当变量创建完成后,对过程事件进行组态编程。一般对象编程工作应用在对象鼠标点击动作上,属性改变,用相应的变量进行事件动作的组态编程。下面是对启动按钮SB2和主轴箱对象的组态编程:
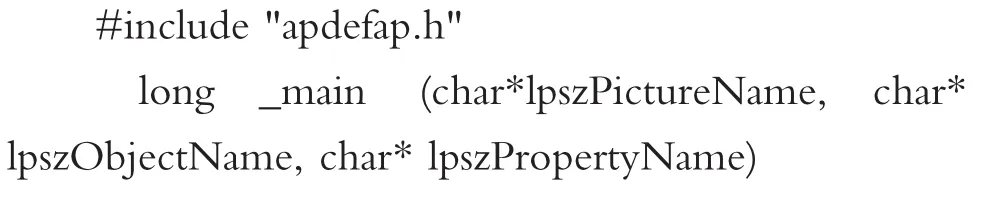
(1)在按钮SB1的对象属性对话框中“事件”→“鼠标”→“按左键”中创建一个C动作。C代码如下:

(2)在主轴箱的对象属性对话框中“属性”→“几何”→“位置X”创建一个C动作。C代码如下:
编程调试时发现:在创建属性C动作代码组态过程画面的过程对象时,触发器触发周期对系统的性能、实时性和减少系统的运算负荷影响较大。一般触发周期选250ms和500ms,在实时性和不致增加较大系统负荷的情况下得到一个较好的平衡点。具有相同属性的事件,如相同过程对象的颜色的改变,相同方向相同速度移动的轨迹等,可以通过创建全局C动作函数来减少代码,并减轻系统负荷特性。这在代码的重用性方面体现出较好的优点。
另外在属性事件组态中,对象的动态化类型的系统性能依次从低到高为C动作→动态对话框→变量连接→直接连接→动态向导。属性有多种动态化类型可供选择利用,可根据动作和事件驱动的复杂程度来决定采用哪一种对象的动态化类型。其中,C动作由于利用ANSI-C脚本语言进行代码编译,功能非常强大,灵活性高,代码重用性强,因此在复杂的动作事件驱动中采用C动作无疑可以减轻组态的工作强度。
3 仿真运行及分析
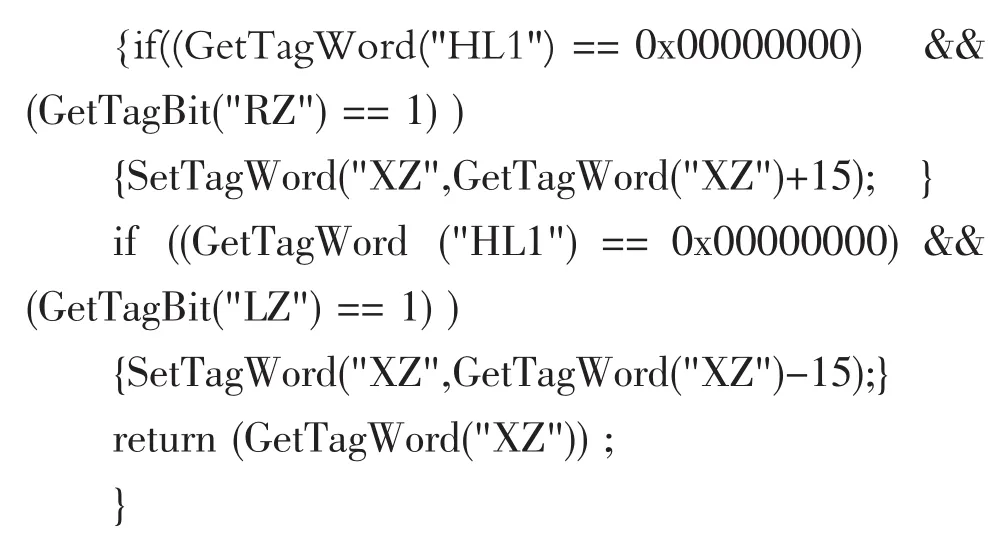
当WinCC工程项目组态完成后就可以激活运行系统,接着可以对HMI进行人机交互。
以主轴箱左右运动为例,图3(a)为主轴箱通过左右手轮旋转的驱动在X水平位置上向左移动,直到左端点极限位置;图3(b)为主轴箱通过左右手轮旋转的驱动在X水平位置上向右移动,直到右端点极限位置。
主电路回路得电时用三相电路红、绿、蓝区分示出。控制回路指示灯,继电器得电时统一用蓝色区分示意。
图3 主轴箱左右运行
初始上电运行:合上总电源QS1开关,相应的交流接触器线圈得电,主三相电路回路用红、绿、蓝三种颜色加以区分。
依此类推,可以完成主轴电机的启动,摇臂上升、下降,立柱和主轴箱的放松、夹紧及启动冷却泵电动机等功能。
4 结 论
Z3050摇臂钻床模拟平台的设计成功实现了摇臂钻床各种操作的模拟,实现了摇臂的上升、下降,主轴箱的左、右移动,立柱与主轴箱的放松、夹紧等功能,展现了机床内部电气控制原理间的电气逻辑关系。更重要的是,对于机床内部的主电路和控制电路逻辑关系用电路原理图的方式组态成一个控制界面,模仿PLC中的“能流”方法,每当一个电气节点得电导通时都形象地给出线端的颜色变化示意,便于快速、深入掌握控制电路的逻辑关系和机床运行情况的电气控制结合机理,可操作性强。
[1]王如桂.电工实用线路与维修实例[M].北京:人民邮电出版社,2007.
[2]苑尚尊.维修电工实践教程[M].北京:清华大学出版社,2009.
[3]赵青.电工识图[M].北京:电子工业出版社,2004.
[4]廖常初.西门子人机界面(触摸屏)组态与应用技术:第2版[M].北京:机械工业出版社,2008.
[5]梁绵鑫.WinCC基础及应用开发指南[M].北京:机械工业出版社,2009.
Configuration Software Simulation Platform Design Based on Radial Drilling Machine
LIU Xinghua1SU Yingying1GE Jike1YANG Manren2
(1.Chongqing University of Science and Technology,Chongqing 401331; 2.Chengdu Xinrui Petrochemical Technology Consulting Limited Company,Chengdu 610516)
Mainly taking Z3050 radial drilling as an example in this paper,using SIMATIC WinCC configuration software to design the machine Z3050 radial drilling simulation platform,all kinds of activities position when the machine running and signal logic information of input and output about machine tool parts inside each node control circuit are simulated.From external mechanical structure movement to the inner electrical logic control,detail by detail simulation,debugging and operation,the effect is ideal,and it can overcome the problem that on relay control circuit of radial drilling simulation platform which it cannot simulate the operation situation of actual parts when the machine running.Thus it can be accurately recurrent space position information of all parts,providing a certain expanding space for radial drilling training.
Z3050;simulation;WinCC
TG522
A
1673-1980(2012)05-0126-03
2012-05-25
重庆市教育委员会科学技术研究项目(KJ111417,CK2011Z01);重庆市自然科学基金项目(CSTC2010BB2285)
刘兴华(1974-),女,硕士,实验师,研究方向为电气传动与控制科学。
