电动汽车用直流无刷电机能量回馈研究
2012-10-14李兴全
李兴全,李 博
锦州海伯伦汽车电子有限公司,辽宁锦州 121000
0 引言
随着能源供应的紧张,汽油的价格越来越高,使用电能作为汽车的动力将会是未来发展的大趋势。但是目前车用动力电池的储能低、充电时间长是制约其应用和普及的瓶颈。而采用能量回馈的方式,可以将电动汽车刹车时的能量回馈给电池,这就变相的增加了动力电池的储能大小,延长了电池一次充电的续驶里程,具有重要的现实意义。本文将专门探讨直流无刷电机在电动汽车中使用的能量回馈方式。
1 系统构成
1.1 整车动力系统组成
整车动力系统主要由蓄电池、直流无刷电机、电机控制器和霍尔位置传感器组成,见图1。蓄电池作为整车的电量储存设备,为电动汽车的运行提供电能。位置传感器采用120°电角度的霍尔传感器。电机控制器根据电机运行时的位置传感器信号,按照霍尔序列与三相全桥开关的对应顺序进行功率管的开关变换。霍尔信号与三相全桥的顺序如表1所列,通过图2所示的功率变换电路,将蓄电池的直流电转换成电机工作的交流电流。
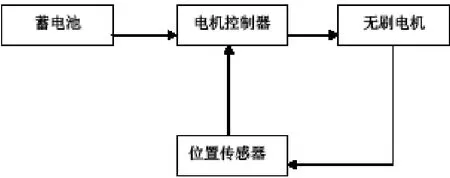
图1 整车动力系统组成图

表1 电动汽车正向行驶霍尔序列与三相全桥开关对应关系
1.2 功率变换部分组成
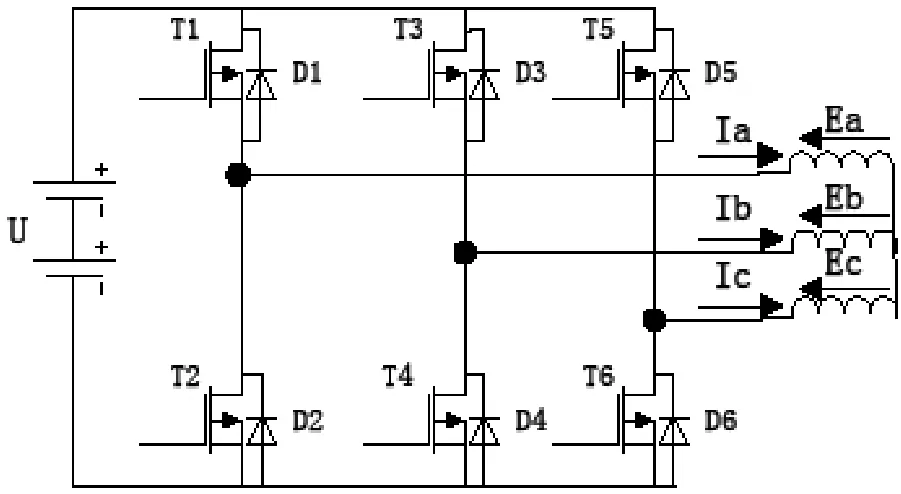
图2 功率变换部分组成图
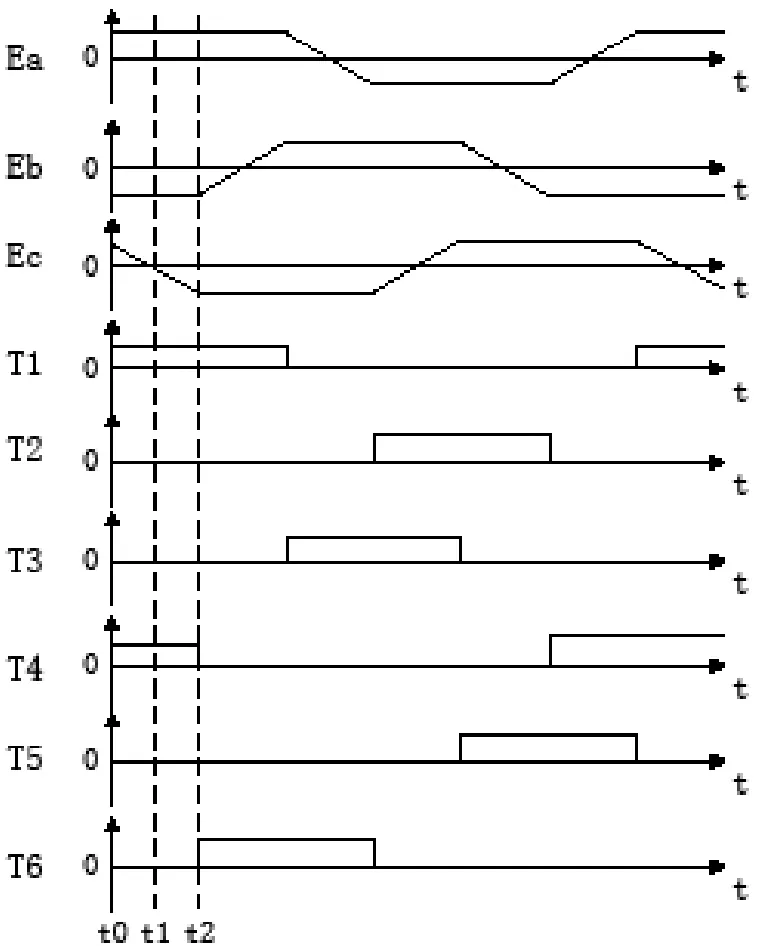
图3 感生电动势与霍尔序列时序图
功率变换部分主要由蓄电池、功率变换电路和直流无刷电机组成,如图2所示。假设电动汽车正向行驶时开关桥的顺序按照表1中的对应顺序,则开关桥和对应的感生电动势波形为图3所示变化。
1.3 回馈控制方式的分类
按照回馈的不同方式,将直流无刷的能量回馈分为自然回馈、全桥回馈和半桥回馈三种类型。
1.3.1 自然回馈方式
当电动汽车处于下坡位置,由于重力加速度使车速不断加快,电机转速随之升高。根据直流无刷电机的特性,当电机转速n大于Ceϕ/U时,线圈所产生的感生电动势就会超过电池电压U,将产生的电量自然的回馈到电池中。此时三相全桥中的六个mosfet均处于截止状态,mosfet的续流二极管处于三相整流工作状态。
1.3.2 全桥回馈方式
全桥回馈以t0~t2区间为例,此时T1和T4全部进行PWM调制。
当T1和T4均为导通状态下,选电池的负极为参考点,此时三相中点的电压U0=U/2,D6一直处于截止状态,电流运行方向为:电池正极→T1→A相线圈→B相线圈→T4→电池负极。
当T1和T4处于关断状态,此时三相中点的电压U0=-Ec,电流的运行方向为:电池负极→D2→A相线圈→B相线圈→D3→电池正极,由电机向电池回馈能量。
可以看出在t0~t1区间,D6虽然处于正向压降,但电路中并没有回路;在t1~t2区间,D6处于反向压降截止状态。所以在t1~t2整个周期内,D6一直处于截止状态。
1.3.3 半桥调制
半桥调制就是在能量回馈时针对上桥T1、T3和T5或下桥的T2、T4和T6进行调制的回馈方式,通过升压斩波将电机线圈产生的感生电动势的能量回馈到电池,仍以t0~t2区间为例。
1)上半桥能量回馈
在采用上半桥制动的续流阶段,此时T1和T3导通,续流电流的流向为:A相线圈→T1→T3→B相线圈。在t0~t1区间,取电池负极作为参考电点,三相中点的电势U0=U,U>Ec>0 ,D5获得正向压降通过T3→B相线圈→C相线圈D5构成回路,D6获得反向压降处于截止状态;在t1~t2区间,三相中点的电势U0=U,Ec<0,D5获得反向电压,处于截止状态。D6获得正向电压,但由于下桥全部处于截止状态,所以D6不导通。
采用上半桥的能量回馈过程中,在t1~t2区间的回馈电流流向为:电池负极→D4→B相线圈→A相线圈→D1→电池正极。在t0~t1区间的回馈电流比在t1~t2区间的基础上多出了电流的流向为:电池负极→T4→B相线圈→C相线圈→D5→电池正极。
由上可知,采用上桥能量回馈时,可分为t0~t1区间和t1~t2区间有两种情况,在t0~t1区间C相线圈参与回馈,A相线圈与B相线圈的电流不同,会产生转矩脉动噪声。在t1~t2区间C相线圈不参与回馈,不产生转矩脉动。
2)下半桥能量回馈
采用下半桥制动的续流阶段,此时T2和T4导通,续流方向为:A相线圈→T2→T4→B相线圈。在t0~t1区间,三相中点的电势U0=0,U>Ec> 0,D5处于正向压降,但没有回路所以不导通,D6处于反向压降截止状态。在t1~t2区间,三相中点的电势U0=0,0>Ec,D5处于反向压降不导通。D6处于正向压降,通过T2构成正向导通回路,续流电流方向为:A相线圈→T2→D6→C相线圈。
采用下半桥制动的回馈阶段,在t0~t1区间的回馈电流流向为:电池负极→D4→B相线圈→A相线圈→D1→电池正极。在t1~t2区间的回馈电流比在t0~t1区间的基础上多出了电流的流向为:电池负极→D6→C相线圈→A相线圈→D1→电池正极。
由上可知,采用下桥能量回馈时,可分为t0~t1区间和t1~t2区间有两种情况,在t0~t1区间C相线圈不参与回馈,不产生转矩脉动。在t1~t2区间C相线圈参与回馈,A相线圈与B相线圈的电流不同,会产生转矩脉动噪声。
2 结论
从以上的分析中可以知道各种回馈方式的特点,自然回馈是不受控制,只要电机转速高于某一特定值就会发生,且其回馈时的能量较大,长时间工作在这种状态下会引发mosfet的二极管发热;全桥回馈时不会产生因为第三相导通而产生的转矩脉动,但是频繁的开关也会产生发热,同时这种回馈方式需要电池参与放电;半桥回馈会产生因第三相导通引起的转矩脉动,产生噪声。
针对以上各种能量回馈方式的特点,为了发挥不同回馈方式的优势同时减少负面的效果,对直流无刷电机的能量回馈制动采用了如下回馈策略。
当自然回馈发生时按照三相全桥的开关序列导通参与整流的mosfet,这样可以减少二极管上的功率损耗,提高回馈效率。当电动汽车正常行驶时,在电机的控制算法中加入全桥回馈的控制算法,将电机内部续流的电能通过全桥整流的方式回馈到电池中,这种算法可以减少上下桥同时调制产生的功率损耗,并在一定程度上降低电机的噪声。当刹车踏板踩下,电动汽车需要制动时,转入半桥回馈制动模式,在电机中增加半桥回馈控制的算法,采用上半桥调制和下半桥调制交替进行,这种算法也可以降低转矩脉动,同时可以提高能量回馈的效率。
根据以上分析出的各种能量回馈特点和控制策略,并结合相对应的算法,已经在锦州海伯伦汽车电子有限公司产品中应用并取得了明显的效果,控制器的效率及续驶里程都有了较大的提高。
[1]张琛.直流无刷电机原理及应用[M].机械工业出版社,2004.
[2]张毅,等.电动汽车无刷直流电机的回馈控制[J].上海交通大学学报,2005.
[3]黄斐梨,等.永磁无刷电动机能量回馈制动调制方式比较[J].微特电机,2005.
[4]宋小庆.电动装甲车无刷直流电机驱动系统的再生制动[J].微电机,2001.
[5]王书贤,邓楚南.电动汽车用电机技术研究[J].微电机,2006.
