前向平滑MUSIC算法及其FPGA设计*
2012-09-06邓琦新杜晓雷
邓琦新,周 围,2,杜晓雷,闫 杰
(1.重庆邮电大学移动通信重点实验室,重庆400065;2.重庆邮电大学光电工程学院,重庆 40065)
波达方向(Direction of Arrival,DOA)估计在现代通信的许多场合都有广泛的应用,如移动通信中的空分多址、电子侦察和对抗[1]等。现阶段应用在智能天线系统中的DOA估计算法有很多种,典型的有 MUSIC、ESPRIT[2]算法等,其中由Schmidt于1979年提出的MUSIC算法[3]因具有较高的分辨能力而受到人们的青睐。但经典MUSIC算法在估计相干信号的DOA时,算法容易失效。本文研究的改进型MUSIC算法[4],通过引入空间平滑技术对信号进行预处理,能够对相干信号的波达方向作出精确估计。从而避免了经典MUSIC算法在估计相干信号的DOA时算法失效的问题。
DOA估计在许多应用场合中,都面临着高速实现、小型化、低成本的要求。本文研究的MUSIC算法的FPGA设计,利用FPGA并行处理的优点,实现算法需要的各个处理单元,并通过状态机(State Machine)对算法进行控制,从而满足算法实时性的要求,对于促进DOA估计算法的高速实现有很重要的意义。
1 前向平滑MUSIC算法
空间平滑思想[5]如图1所示。假设有L个信源入射到由M个阵元构成的均匀直线阵,前向平滑MUSIC算法的步骤如下:
步骤1:将线性等距的M个阵元分为q个重叠的子阵列,各子阵列所含阵元个数为p,且满足p+q-1=M。
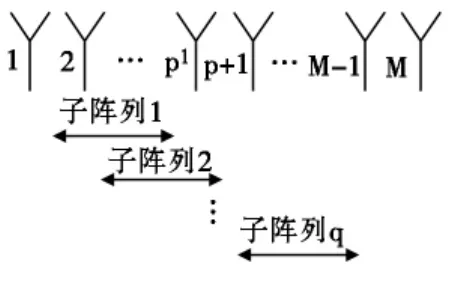
图1 前向空间平滑
步骤2:第l个子阵列的接收矢量为:

式中:k表示第k次快拍,
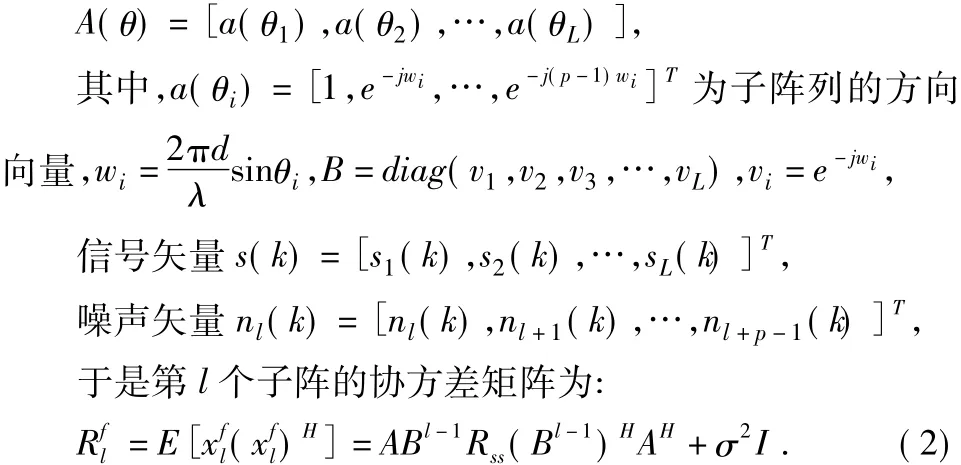
其中Rss为信号的协方差矩阵。
步骤3:计算每个子阵列的协方差矩阵,再将协方差矩阵取平均,作为前向平滑矩阵:

步骤4:对前向平滑矩阵进行特征分解

式中:U为特征矢量矩阵,Σ =diag(λ1,λ2,…,λp),将Rf的特征值按从大到小排序,则有:
xx
λ1≥λ2…≥λL≥λL+1=… = λP= σ2n,前L个大的特征值对应的特征向量张成信号子空间Us,相等的P-L个小的特征值对应的特征向量张成噪声子空间Un。
构造MUSIC空间谱函数Un:
空间谱的波峰对应的角度就是波达方向。
2 仿真分析
相干信号环境下的仿真分析:在图1所示的均匀直线阵列中,设定阵元数M=8,阵元间距为半波长,信源数L=3;三个信号的来波方向分别为 10°,35°和 60°,其中 10°,35°两个方向的信号是相干的;噪声是均值为0,方差为1的加性高斯白噪声;快拍数为1024,信噪比为15dB。在此情况下,分别采用经典MUSIC算法和子阵数q=3,子阵阵元数p=6的前向平滑MUSIC算法对波达方向进行估计,Matlab仿真结果如图2所示。
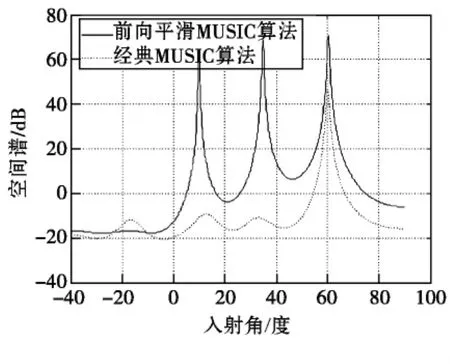
图2 两种MUSIC算法仿真比较
从图2可以看出,在处理相干信号源时,经典MUSIC算法失效,不能准确估计出10°,35°两个相干信号的来波方向;而利用前向平滑MUSIC算法,三个信号均被清晰地分辨出来。由此说明,前向平滑MUSIC算法能很好地估计出相干信号的波达方向。
3 前向平滑MUSIC算法的FPGA设计
前向平滑MUSIC算法的FPGA设计[6]可以分为以下三步:计算采样协方差矩阵,对协方差矩阵进行特征分解(EVD)和谱峰搜索(如图3)。
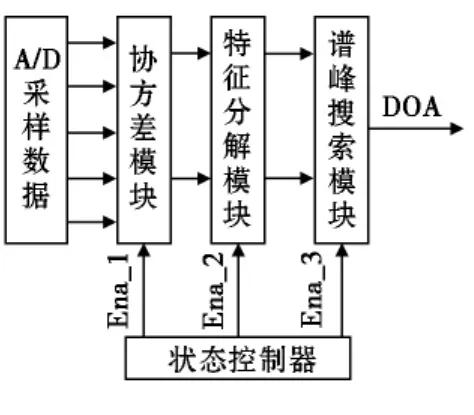
图3 MUSIC算法FPGA设计
下面以八阵元均匀直线阵为模型,介绍前向平滑MUSIC算法的FPGA设计。
3.1 协方差模块的实现
将均匀直线阵划分为子阵阵元数为6,子阵数为3的模型,子阵的协方差矩阵元素的表达式为:

式中:M为快拍数,k表示第k次快拍,xi表示公式(3)中xf
l(k)的第i个元素,rij表示协方差矩阵第i行第j列的元素。
协方差矩阵模块为一个乘法累加器,需要同时计算28个上三角矩阵元素和8个对角元素,可设计一个并行的乘法累加器使得每个时钟周期都可以同时进行36次相乘累加计算。
对求出的协方差矩阵进行酉变换[7],将复数域转化为实数域,降低其运算复杂度,酉变换公式为Re{Qxfl(k)QH}
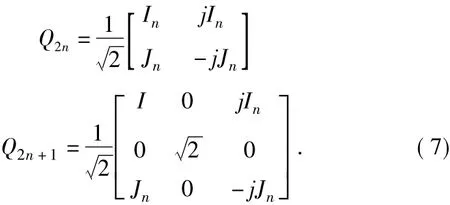
其中In为n阶单位矩阵,Jn为n阶交换矩阵。
对酉变换之后的矩阵进行求和平均,输出协方差矩阵用于特征分解,设计如图4。
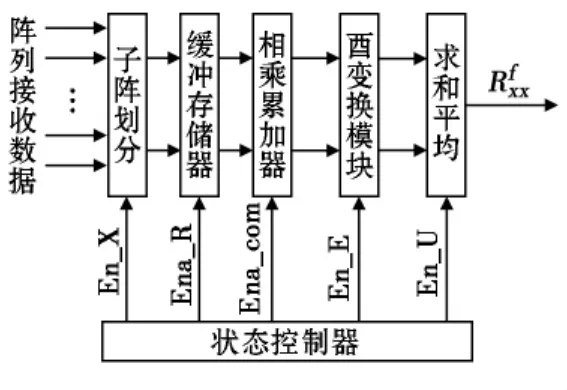
图4 协方差模块结构框图
3.2 特征分解模块的硬件实现
该模块采用Jacobi算法[8]完成对协方差矩阵的特征分解,如图5。
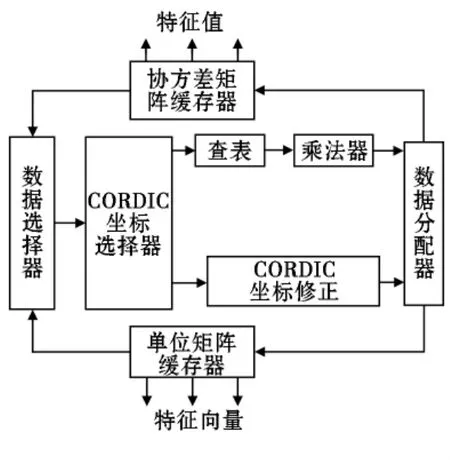
图5 EVD模块设计框图
3.2.1 矩阵缓存器、数据选择器和数据分配器
在特征分解迭代过程中,矩阵缓存器负责缓存和更新协方差矩阵和单位矩阵的元素。
数据选择器在迭代过程中对Jacobi算法进行控制,负责控制缓存器中数据的写入和写出。
3.2.2 计算模块
用 CORDIC[9]坐标旋转和 Jacobi[10]迭代算法,将协方差矩阵对角化。
Jacobi算法的流程如下:
(1)CORDIC反正切模块计算旋转角

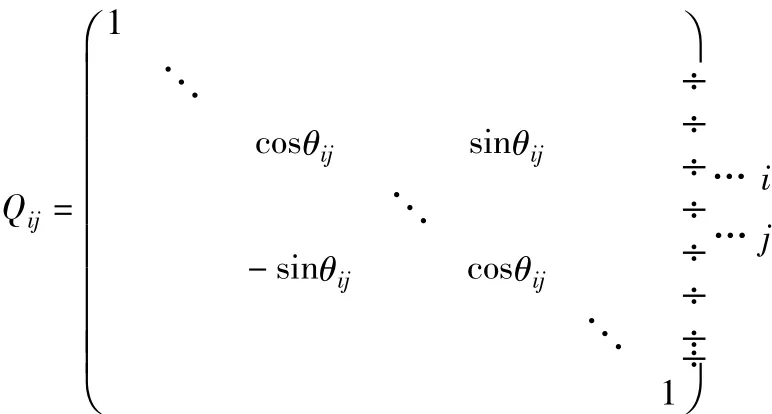
(2)CORDIC旋转模块计算坐标旋转

式中:k为迭代次数,Qij(k)为第k次迭代的旋转矩阵,Rfxx(1)=Rfxx。
(3)迭代过程中,按照如下顺序进行扫描:r12→r13→…→r18→r23→…r28→…→r78在单次迭代后,矩阵Rfxx的上三角元素rij约等于0。若所有的上三角元素都完成“扫描”,则这样的过程称为一次“清扫”。在n1次“清扫”后,非对角元素近似为0,对称矩阵Rfxx转换为对角矩阵Rf xx(n1),其对角元素即为特征值。
(4)用同样的旋转矩阵对单位矩阵E进行旋转,E(k+1)=QTijE(k)Qij,E(1)=E,同样经过n1次迭代之后,得到矩阵E(n1),矩阵E(n1)的列矢量就是特征向量,对应于Rfxx(n1)对角线上同一列的特征值。
3.3 谱峰搜索模块
该模块利用特征分解模块输出的特征值和特征向量,进行谱峰搜索,求出波达方向,如图6。
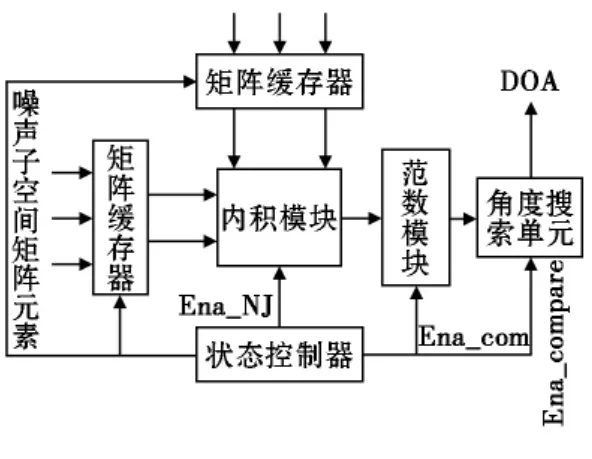
图6 谱峰搜索模块
矩阵缓存器,用于将方向向量保存在ROM中。对于本文使用的均匀线阵,其角度的搜索范围是-90°~90°。设定搜索步长为1°,所有的a(θi)值可以预先计算好并写入ROM芯片内,再通过内积模块和范数模块计算AH(θ)UnUHnA(θ),得到180个谱函数值;最后通过角度搜索单元对180个数据进行比较,得出最小值,其对应的角度就是波达方向。
4 结束语
本文研究了一种用于处理相干信号波达方向的改进型MUSIC算法,并通过matlab仿真与经典MUSIC算法进行比较,分析其性能。利用 FPGA并行计算[11]的优点,研究了FPGA实现前向平滑MUSIC算法的原理,对实际工程应用具有一定意义。
[1]黄少杰.浅谈智能天线技术及其在3G中的应用[J].中国电子商务,2011,(8):37-37.
[2]肖先赐.现代谱估计——原理与应用[M].哈尔滨:哈尔滨工业大学出版社,1991.
[3]Schmidt R O.Multiple Emitter Location and Signal Parameter Estimation[J].IEEE Trans.on AP,1986.3.AP-34:276-280.
[4]吴国庆,陈善继.基于解相干的MUSIC算法估计性能分析[J].现代电子技术,2011,34(7):94-96.
[5]Qing Chen,Ruolun Liu.On the Explanation of Spatial Smoothing in MUSIC Algorithm for Coherent Sources[C].International Conference on Information Science and Technology,2011,3:699-702.
[6]郑洪.空间谱估计算法的高速实现[D].成都:电子科技大学电子工程学院,2004.
[7]何劲,陈建文,刘中.利用空时相关矩阵酉变换估计达波方向[J].系统工程与电子技术,2005,5(27):811-813.
[8]刘婷婷,刘俊卿,张健楠.基于Jacobi方法的Hermitian矩阵特征分解算法[J].电子科技,2010,23(12):60-61.
[9]牛晨晓,赵忠,聂聪.一种CORDIC算法的FPGA实现[J].计算机技术与发展,2011,6(21):16-19.
[10]Wang Tao,Wei Ping.Hardware Efficient Architectures of Improved Jacobi Method to Solve the Eigen Problem[C].2010 2nd international conference 011 computer engineering and technology,ICCET,2010(6):22-25.
[11]陈景良.并行算法的设计与分析[M].北京:高等教育出版社,1994.